Изобретение относится к сельскохозяйственной уборочной технике и может быть исиользовано ири изготовлении скоростных зерновых прицепных жаток.
Известны механизмы привода ножа жатвенных машин от ходового колеса машины или от ВОМ трактора, включающие кривошипный вал. Рел уш;ие аппараты современных зерновых жаток приводятся преимущественно or ВОМ трактора. Однако в известном механизме привода ножа от ВОМ трактора с увеличением скорости движения жатки скорость вращения жривошина не изменяется, а подача скашиваемой массы растет, что приводит к ухудшению качества уборки. Если же привод ножа осуществлять от ходового колеса жатки, то ери высокой скорости двинсения жатки скорость ножа возрастет до недопустимых пределов.
В предлагаемом механизме, с целью улучшения качества уборки на повышеиных скоростях, кривошипный вал связан передачей, например «линоременной с полуосью диффереициала автомобильного тина, вторая полуось которого соединена с ВОМ трактора, а ведущая щестерня - с ходовым колесом жатки, т. е. -привод ножа осуществлен одновременно и от ВОМ трактора и от ходового колеса жатки.
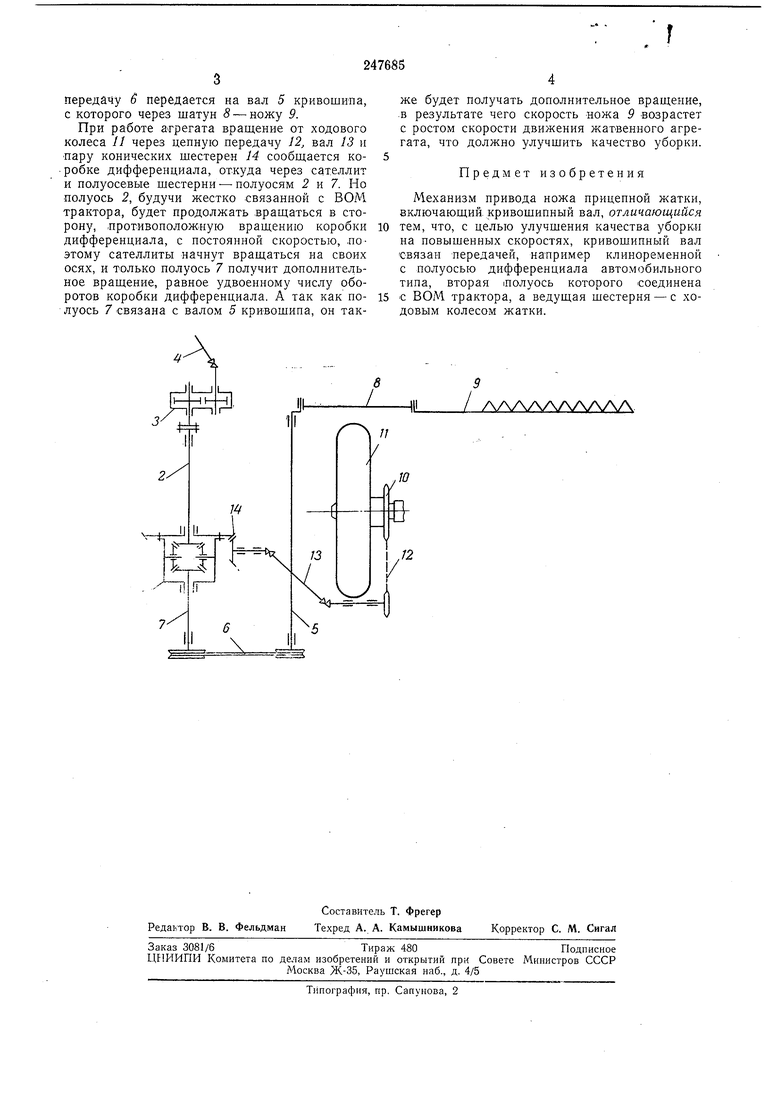
На чертеже изображена кинематическая схема механизма привода ножа прицепной зерновой жатки.
Предлагаемый привод включает в себя дифференциал 1 автом.обильного типа, одна полуось 2 которого через одноступенчатый редуктор 3 и карданный вал 4 соединена с ВОМ трактора. Редуктор 3 служит для изменения направления вращения, получаемого полуосью 2 от ВО.М трактора, и некоторого снижения числа оборотов ее. Вал 5 кривошипа связан с помощью клиноременной передачи 5 со второй полуосью 7 дис|)фереициала. Привод ножа содержит также шатун 8, соединяющий
кривошип с ножом 9, и шестерию 10, жестко соединенную со ступицей ходового колеса 11. Цепная передача 12, .вал 13 и пара конических шестерен 14 образуют кинематическую связь ходового колеса 11 с дифференциалом /.
Работает механизм привода следующим образом. При включенном ВОМ трактора и неподвижном агрегате вращение через карданный вал 4 и редуктор 3 сообщается полуоси 2, затем через полуосевые шестерни и сателлиты дифференциала 1-полуоси 7, направление вращения которой становится противоположно вращению полуосИ 2 и совпадает по направлению с вращением ВОМ трактора.
передачу 6 передается на вал 5 кривошипа, с которого через шатун 8 - ножу 9.
При работе агрегата вращение от ходового колеса // через цепную передачу 12, вал 13 и Пару конических шестерен 14 сообщается коробке дифференциала, откуда через сателлит и полуосевые шестерни - полуосям 2 и 7. Но полуось 2, будучи жестко связанной с ВОМ трактора, будет продолжать вращаться в сторону, лротивополож ную вращению коробки дифференциала, с постоянной скоростью, лоэтому сателлиты начнут вращаться на своих осях, и только полуось 7 получит дополнительное вращение, равное удвоенному числу оборотов коробки дифференциала. А так как полуось 7 связана с валом 5 кривошипа, он также будет получать дополнительное вращение, .в результате чего скорость ножа 9 возрастет с ростом скорости движения жатвенного агрегата, что должно улучшить качество уборки.
Предмет изобретения
Механизм привода ножа прицепной жатки, включающий, кривошипный вал, отличающийся
тем, что, с целью улучшения качества уборки на повышенных скоростях, кривошипный вал связан передачей, например клиноременной с полуосью дифференциала автомобильного типа, вторая лолуось которого соединена
с ВОМ трактора, а ведущая шестерня - с ходовым колесом жатки.
A/WWNAAAA
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий мост транспортного средства | 1988 |
|
SU1586928A1 |
| Жатвенный агрегат для получения одинарных и двойных валков за один проход при раздельной уборке зерновых культур | 1958 |
|
SU122978A1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
| Ведущий мост транспортного средства | 1989 |
|
SU1703519A2 |
| УСТРОЙСТВО РАСПРЕДЕЛЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2011 |
|
RU2598448C2 |
| ВАЛКОВАЯ ЖАТКА | 2002 |
|
RU2242858C2 |
| УЗЕЛ АВТОМАТИЧЕСКОГО ДИФФЕРЕНЦИАЛА С ОГРАНИЧЕННЫМ СКОЛЬЖЕНИЕМ И ВЕДУЩИЙ МОСТ, ИМЕЮЩИЙ ТАКОЙ УЗЕЛ | 2020 |
|
RU2735561C1 |
| Ведущий мост транспортного средства | 1989 |
|
SU1699824A2 |
| Способ реверсирования направления движения при испытаниях транспортных средств | 1986 |
|
SU1383134A1 |
| Ведущий мост транспортного средства | 1990 |
|
SU1787816A1 |
