В области автоматики известны. устройства для управления перемещением опоры шагаюш,его движителя, состоящие нз трех сервомеха;низмо1В, каждый из которых управляется следящей системой, имеющей усилитель и датчик обратной связи.
Описываемое устройство отличается от известных тем, что оно содержит два датчика коррекции, синус-косинусный механизм с ползунами, три электромеханических профилированных потенциометра с лолзунками, причем входы двух из них соединены с ползунами синус-косинусного механизма, выходы - со входами усилителей следящих систем, управляющих продольным и ноперечны.м перемещениями опары, а третий нодсоединен ко входу усилителя следящей системы, управляющей вертикальны,м перемещением опоры. Вход одного из датчиков коррекции подключен к сервомеханизму продольного перемещения, выход - ко входу усилителя следящей 1системы поперечного перемещения опоры, а вход второго датчика коррекции подключен к сервомеханизму поперечного перемещения и выход - ко входу усилителя следящ ей системы вертикального перемещения опоры.
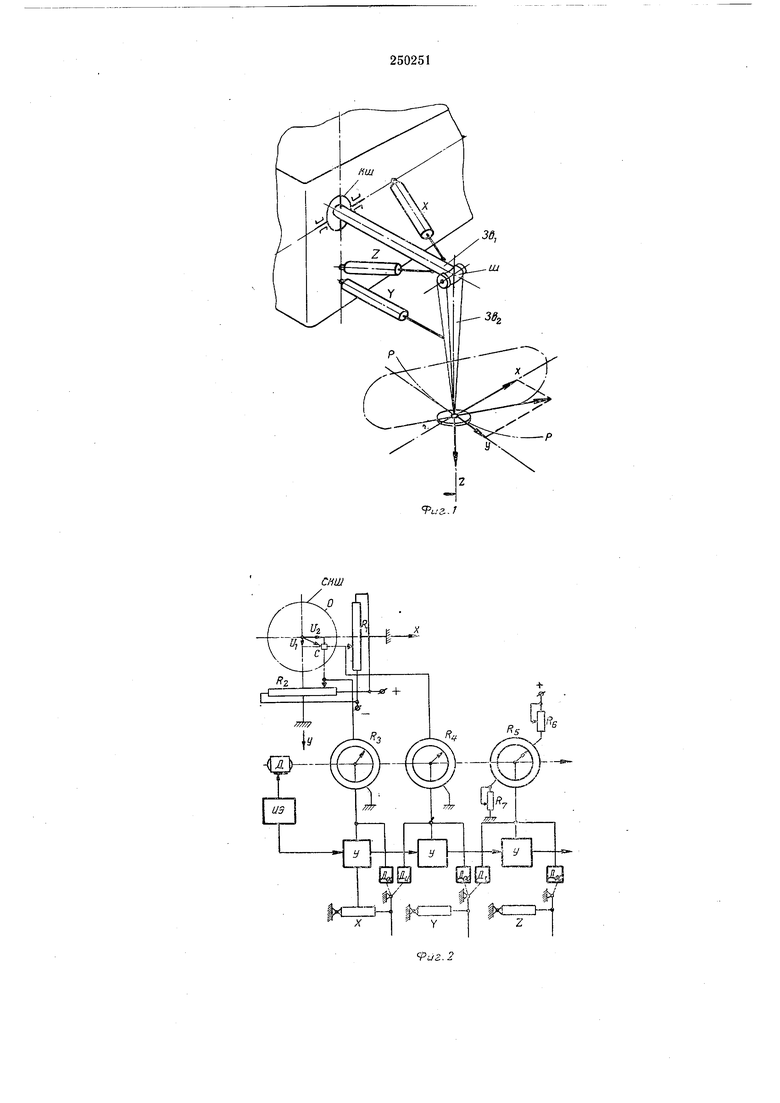
Оператор задает HanpaBvienne движения, длину шага, высоту подъема конца опоры над грунтом и клиренс движителя. На фиг. 1 представлена кинематическая схема описываемого устройства; на фиг. 2 - его принципиальная электрическая схема.
Опора (см. фиг. 1) приводится в движение тремя сервомеханизмами X, У и Z, перемещающими конец опоры в трех пе1рпендикулярных направлениях. Опора состоит из звеньев Зв- и Звг, соединенных щарннром Я/ первого рода, и прикреплена к корпусу с помощью карданового иларнира Р(Ш. При работе сервомеханизмов X, У, Z .конец опоры перемещается в направлениях осей х, у, z.
Электрическая схема устройства для управления движением оло|ры шагающего движ ителя (см. фиг. 2) питается от источника энергии ИЭ и состоит из синус-косинусного механизма СК.М, включающего потенциометры R и R с заземленной средней точкой, причем ползунки потенциометров связаны через сухарь С, который может занимать любое положение внутри ограничивающей окружности О,
трех электромеханических функциональных потенциометров R, Rn, и К, профилированных по црограммам работы сервомеханизмов Л , У и Z при максимальном размахе их движений, двух задающих реостатов е и R, трех
ет в себя усилитель У и датчик обратной связи Дос сервомеханизмов X, 7 и Z, двух датЧИков корр1екции Дк. Ползулки дотенциометров 3, и сидят на одиом валу и вращаются от электродвигателя 6 с редуктором.
Механизм 4 служит для задания направления шагания и длины шага опО(ры. Например, при положении сухаря С, изображенном на фиг. 2, с потенциометров и. R /рнимаются напряжения U и Uz, которые затем лоступают на электромеханические функциональные потйнциометры RZ и 4, управляювдие перемеш,енйем опоры в горизонтальной плоскости. При перемеш,ении сухаря по радиусу окружности изменяется длина шага оно,ры, а направление шагания зависит от соотношения я поляр. нОСтей напряжений LJ и f/g.
Функциональный потенциометр R управляет перемещением опоры по вертикали. При изменении величины сопротивления меняется размах траектории по вертикали. При изменении сопротивления 7 траектория смещается но ве,ртикали, и тем самым меняется клиренс движителя. Датчики коррекции 7 служат для спрямления траектории конца опоры. Например, при работе сервомеханизма Y конец опоры перемещается по траектории Р-Р (фиг. 1). Для приведения траектории к прямой линией необходимо, чтобы сервом ехан,изм Z совершал небольщие ком.пенсИ|рующие движения. Датчикам .коррекции 7 может служить функциональный потенциометр.. Сигнал, зависящий от величины Хода сервомеханизма Y, подается на .вход усилителя сервомеханизма Z. Перемещение нолзуНков потенциометров Ri, , Кв, Ri производят от одной ручки управления, имеющей три степени свободы. Например, при перемещении ручки в горизонтальной ПЛОСКОСТИ перемещается суха(рь С « связанные с ним ползунжи. потенциолметров R и R-. При этом изменяется направление Движения и
длина шага. При перемещении ручки управления по вертикали пе ремещается ползунок сопротивления 7, регулируя клиренс. Ползунок сопротивления , регулирующего высоту
подъема опары над грунтом, может управляться от системы, измеряющей величины неровностей грунта перед движителем.
Описываемую схему управления может иметь каждая о.пора движителя. В этом случае ползунки программных потенциометров , 4, 5 Всех опор находятся на одной оси и вращаются синхронно. Фазирование работы опор осуществляется разворотом ползунков одной лруппы опор относительно другой.
Предмет изобретения
Устройство для управления перемещением опоры шагающего дви;жителя, состоящее из трех сервомеханизмов, каждый из которых управляется следящей Оистемой, имеющей усилитель и датчик обратной связи, отличающееся т:е.тл, что, с целью повышения эксплуатационных характеристик движителя, оно содержит два датчика коррекции, синус-.косинусный
механизм с ползунками, три электромеханических профилдрованиых потенциометра с ползунками, причем .входы двух из них соединены с ползунками синус-косинусного механизма, выходы-со входами усилителей следящих
систем, управляющих продольным и поперечным перемещениями опоры, а третий подсоединан ко входу усилителя следящей системы, управляющей вертикальным перемещением опоры, вход одного из датч:икав коррекции
подключен к сервомеханизму продольного перемещения, выход - ко входу усилителя следящей .системы .поперечного перемещения опоры, а вход второго датчика коррекции подключен к сервомеханизму поперечного перемеще-.
ния и выход -,ко входу усилителя следящей системы ве;ртикального перемещения опоры.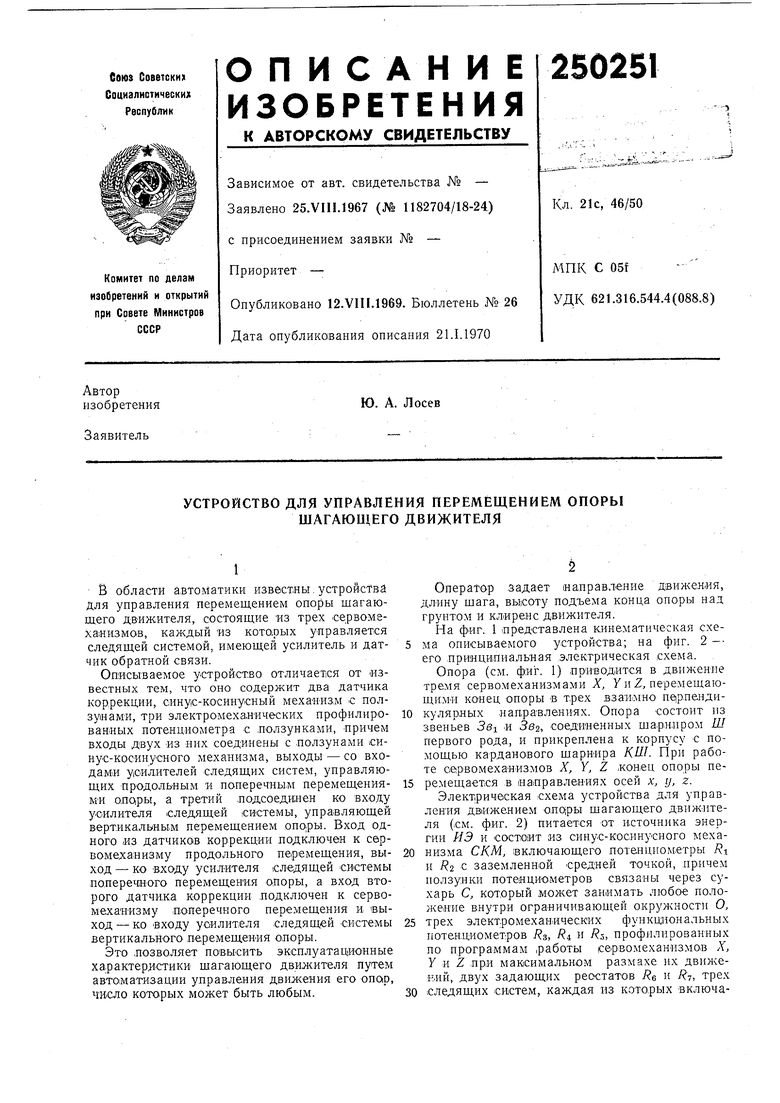
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическая следящая система для копировальных станков | 1957 |
|
SU124277A1 |
| Устройство для управления положением шагающего экипажа | 1977 |
|
SU765094A1 |
| Электрогидравлический следящий привод | 1988 |
|
SU1557370A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| КУРСОВАЯ СИСТЕМА | 2008 |
|
RU2381452C1 |
| КОРАБЕЛЬНАЯ ОПТИЧЕСКАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2083443C1 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2011 |
|
RU2465168C1 |
| Масштабно-дистанционная фотокопировальная система | 1955 |
|
SU121164A1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |