Р1звестны система управления гидравлическим ковочным прессом по авт. св. ЛГе 200437, содержаидая рукоятку ручного управления прессом, соединенную тягой с гидравлическим сервомотором с подвижной рамкой, и следящий сервомотор с золотником, связанный с валом глазного распределителя.
Предложенная система управления является дальнейшим усовершенствованием известной системы и отличается тем, что в корпусе дополнительного сервомотора в месте контакта его с плунжером выполнен конический заходный поясок, а упомянутый плунжер снабжен по периметру, по крайпей мере, одной канавкой переменной глубины.
Такое выполнение системы обеспечивает заданный закон дви/кения клапанов управления нрессом в автоматических режимах.
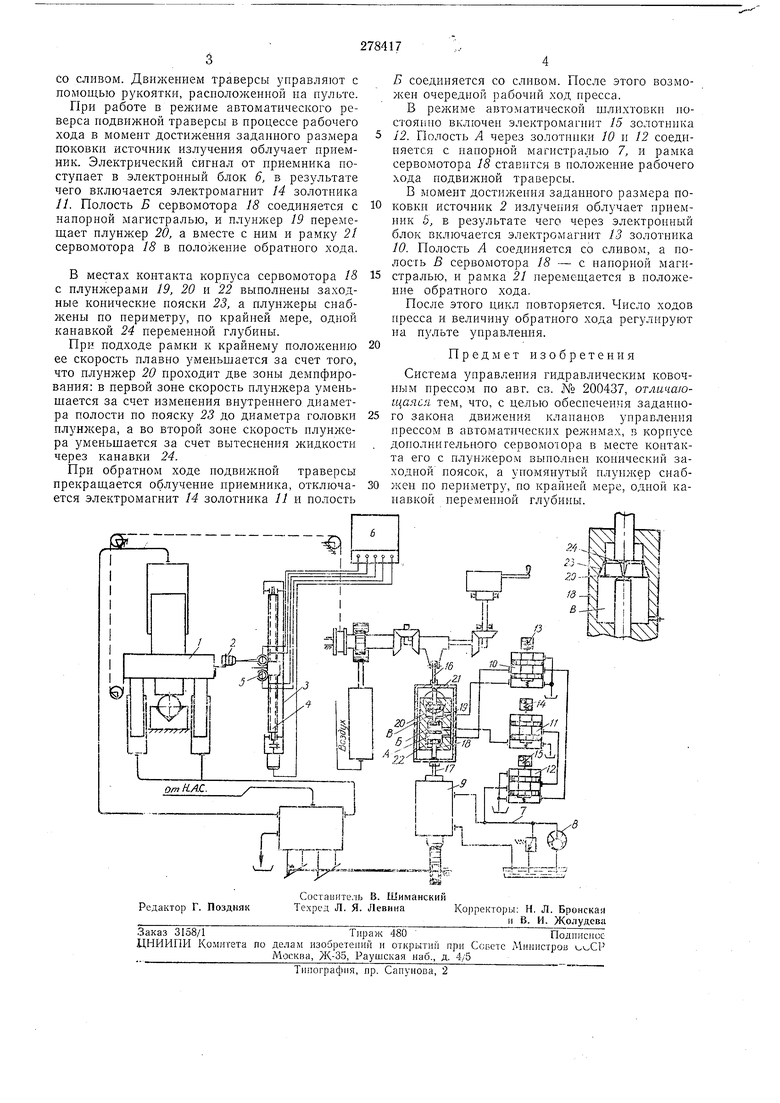
Схема системы управления гидравлическим ковочным прессом представлена на чертеже.
Па подвижной траверсе / ковочного пресса укреплен источник 2 излучения. Рядом с нрессом установлена стойка, на которой находится механизм перемещения каретки. В корпусе 5 механизма на вертикальном ходовом винте 4 смонтирована гайка-каретка, па панели которой закреплепы приемники 5 излучения. Вертикальное перемещение каретки для установки ее в положенне, соответетвующее заданному размеру ноковки, производится с помощью
электродвигателя, который приводит во врап епие ходовой винт.
Перед началом ковки каретку со счетчиками устанавливают в полол ение, соответствующее заданному размеру поковки. Во время рабочего хода подвижной траверсы, когда размер поковки равен заданному, поток излучения от источника попадает на приемник. Электрический сигнал от приемника излучения поступает в электронный блок 6 и используется для включения индикаторных ламп и автоматизации управления прессом.
Система управления помимо сохранення режима ручной работы обеспечивает автоматическую работу пресса в режиме автоматического реверса траверсы из положения, соответствующего заданному размеру ноковки, - и в режиме автоматической шлихтовки до заданного размера с регулировкой величины
хода.
Для обесиечения работы в указанных режимах в масляную магистраль 7, идущую от насоса 8 к следящему сервомотору Я встроены золотники 10, 11 }1 12 с. электромагнитами 13,
14 и 15. Между тягой 16 управления золотником 17 следящего сервомотора установлен дополнительный сервомотор 18.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU200437A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1973 |
|
SU408827A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ | 1972 |
|
SU323295A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1969 |
|
SU251367A1 |
| Система автоматического управления ковочным прессом | 1975 |
|
SU610678A1 |
| Система автоматического управления гидравлическим прессом | 1974 |
|
SU720901A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМ ПРЕССОМ В РЕЖИМЕ «ШЛИХТОВКА» | 1972 |
|
SU432009A1 |
| А УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU201036A1 |
| ПРЕСС КОВОЧНЫЙ, МЕХАНОГИДРАВЛИЧЁСКИЙ | 1968 |
|
SU212026A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПАРОГИДРАВЛИЧЕСКИМ КОВОЧНЫМПРЕССОМ | 1967 |
|
SU202734A1 |
