Изобретение относится к области приборостроения.
Пзвестны устройства для определения угла наклона объектов, содержащие маятниковый элемент, -гидравлический демпфер и преобразователь, помещенные в герметический корпус с демпфирующей жидкостью.
Недостатком известных устройств является наличие наряду с собственно маятниковым элементом как основным и самостоятельным конструктивным узлом дополнительного конструктивного узла - гидравлического демпфера, что приводит к необходимости заполнения всего корпуса датчика жидкостью. Достаточно большое количество жидкости в зам кнутом объеме приводит к необходимости применения компенсаторов расширения жидкости на случай изменения в. процессе эксплуатации температуры окружающей среды. Вследствие влияния сжимаемости воздуха воздушные демпферы неработоспособны при работе на больших частотах.
Предлагаемое устройство отличается от известных тем, что в нем в качестве маятникового элемента использован лепесток гидравлического демпфера, выполненный в виде симметричного двухсекторного диска со смещенным вниз центром тяжести. Внутренний объем корпуса, охватывающий лепесток, имеет форму двухсекторного дискового объема с углами секторов, большими углов лепестка на величину рабочих углов.
Такая конструкция устройства позволяет уменьшить объем демпфирующей жидкости и без дополнительных конструктивных узлов компенсации обеспечить возможность работы устройства в диапазоне рабочих температ ф за счет проведения его заполнения при крайней верхней рабочей температуре.
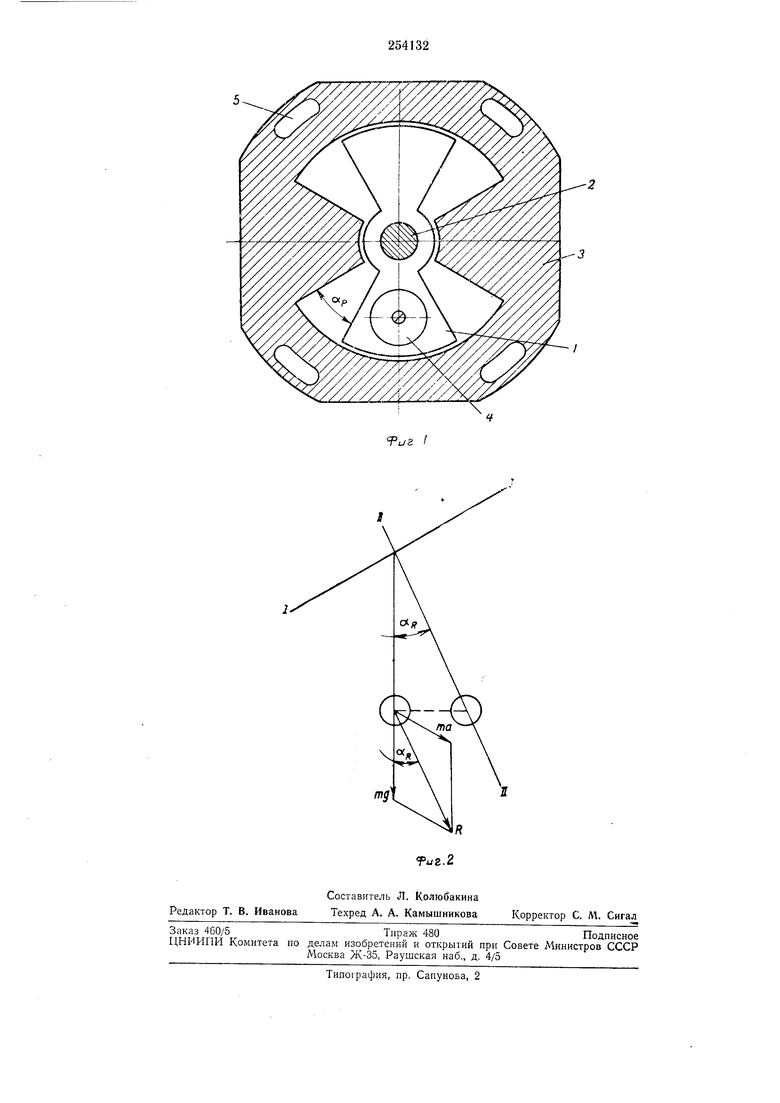
На фиг. 1 приведена принципиальная схема устройства для определения угла наклона объектов; на фиг. 2 - векторная диаграмма.
Устройство содержит лепесток 1 демпфера, жестко связанный с осью 2, установленной в корпусе 3 на шарпкоподплтника.х.
Для создания необходимой д аятнпковости, которая обеспечивает заданную статическую точность, в нижней части лепестка демпфера крепится груз 4. Лепесток выполнен в виде сим.лгетричного двухсекторного диска. Последний охвачен симметричным двухсекторпым дисковым объемом корпуса 3 с радиальным и торцовым зазорами, за исключением угловых зазоров по секторам корпуса, которые превышают углы секторов лепестка / на величину рабочих, определяемых устройством углов а (например, на 30°).
довательно, с объектом или платформой путем крепления корпуса к объекту или платформе через проушины 5.
При наклоне корпуса относительно горизонта на угол а ротор датчика удерживается лепестком / демпфера в нулевом положении, при котором груз 4 лепестка занимает нижнее нулевое (отвесное) положение. Статор датчика, укрепленный на корпусе, увлекается им и поворачивается относительно своего нулевого положения также на угол а. Датчик нри этом вырабатывает электрический сигнал, пропорциональный в установившемся режиме углу наклона корпуса устройства относительно плоскости горизонта вокруг оси, параллельной оси /-I (см. фиг. 2).
Прн действии горизонтального ускорения в направлении, перпендикулярном оси /-/, на груз 4 будет действовать горизонтальная та и вертикальная mg силы. Груз при этом стремится занять уже не отвестное положение mg, а положение //-//, параллельное равнодействуюш,ей R. Другими словами, при отсутствии наклона корпуса 3 устройства относительно плоскости горизонта лепесток демпфера с грузом 4 под действием горизонтального ускорения поворачивает ротор датчика крена, что приводит к наличию сигнала ошибки, в то время как корпус устройства и объект (платформа) находятся в горизонтальном положении. Эта ошибка в установившемся режиме будет равна углу отклонения а/ .
Время накопления ошибки ид выгоднее иметь большим времени действия линейного ускорения, что достигается с помошыо демифера.
Это происходит за счет того, что при повороте ленестка / демпфера, например, против часовой стрелки относительно корпуса 3 жидкость из верхней левой и нижней правой полостей вынуждена через зазоры между корпусом 3 и лепестком демпфера перетекать в верхнюю правую и нижнюю левую полости. Выбирая зазоры между корпусом и лепестком демпфера, можно обеспечить время накопления ошибки больше времени действия горизонтального ускорения. Кроме того, этот зазор должен обеспечивать необходимую степень успокоения собственных колебаний лепестка, демпфера, возникающих после прекращения действия горизонтального ускорения.
Маятниковый датчик крена выполняется достаточно жестким и герметичным, чтобы обеспечить отсутствие утечки жидкости и подсасывания воздуха из-за наличия перепада
давления снаружи и внутри корпуса.
Предмет изобретения
Устройство для определения угла наклона объектов, содержашее маятниковый элемент,
гидравлический демпфер и преобразователь, помеш,енные в герметический корпус с демпфирующ,ей жидкостью, отличающийся тем, что, с целью упрощения конструкции и уменьшения влияния температуры, в нем в качестве
маятникового элемента использован лепесток гидравлического демпфера, выполненный в виде симметричного двухсекторного диска со смещенным вниз центром тяжести, а внутренний объем корпуса, охватывающий лепесток,
имеет форму двухсекторного дискового объема с углами секторов, большими углов ленестка на величину рабочих углов.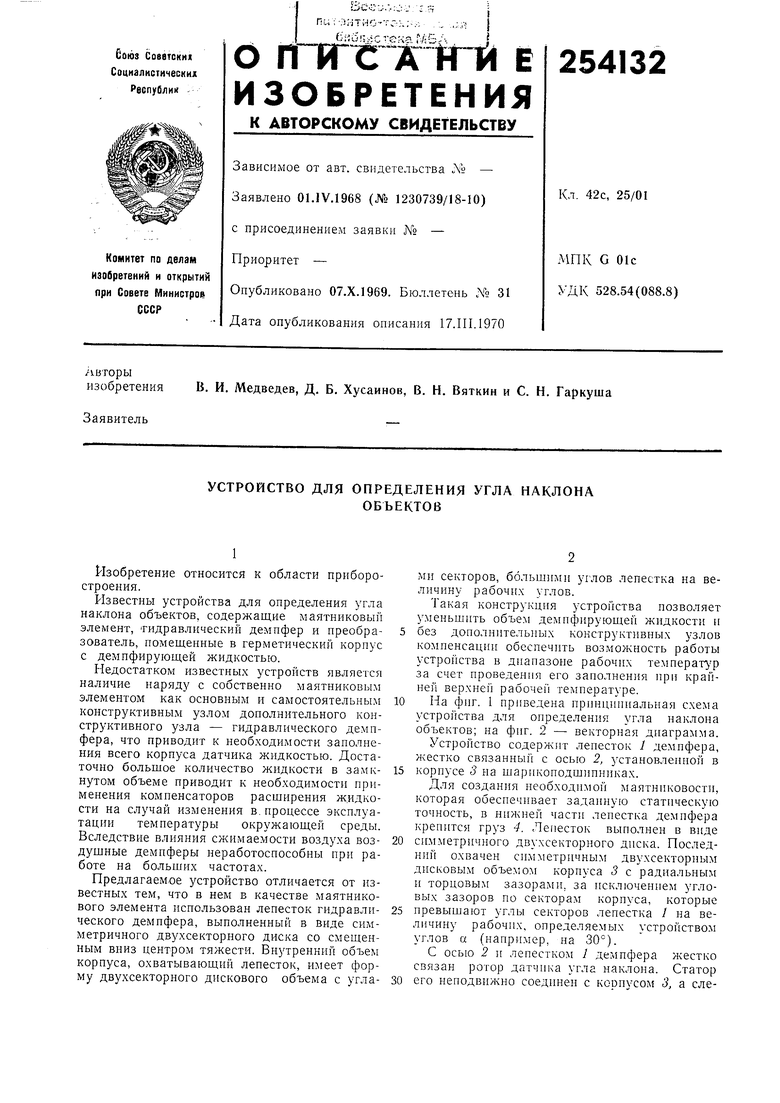
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПУСКА БОЕПРИПАСА ЕГО БОРТОВЫМ ДАТЧИКОМ ДО СТАРТА ПРИ ОТСУТСТВИИ ЭЛЕКТРОПИТАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2224204C1 |
| Датчик угла наклона | 1976 |
|
SU682761A1 |
| ПОДОЛЬСКИЙ АКСЕЛЕРОМЕТР ЛИНЕЙНОГО УСКОРЕНИЯ | 1989 |
|
RU2010234C1 |
| ДИНАМИЧЕСКИЙ СТЕНД ДЛЯ ОРИЕНТАЦИИ РАЗЛИЧНЫХ | 1966 |
|
SU185097A1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Манипулятор | 1990 |
|
SU1816262A3 |
| ПОВОРОТНАЯ УСТАНОВКА | 1968 |
|
SU231181A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |