Известны гусеничные ходовые механизмы самоходных машин типа одноковшовых экскаваторов, кранов и т. п. Они содержат ходовую раму, электродвигатель н бортовые передачи с промежуточными валами.
Цель изобретения - обеспечить плавный разворот машины. Для этого входной вал каждой бортовой передачи соединен непосредственно с валом электродвигателя посредством тормоза и управляемой фрикционной муфты, например шиннопневматической, причем входной вал каждой бортовой передачи может быть располон ен коаксиально с одним из промежуточных валов.
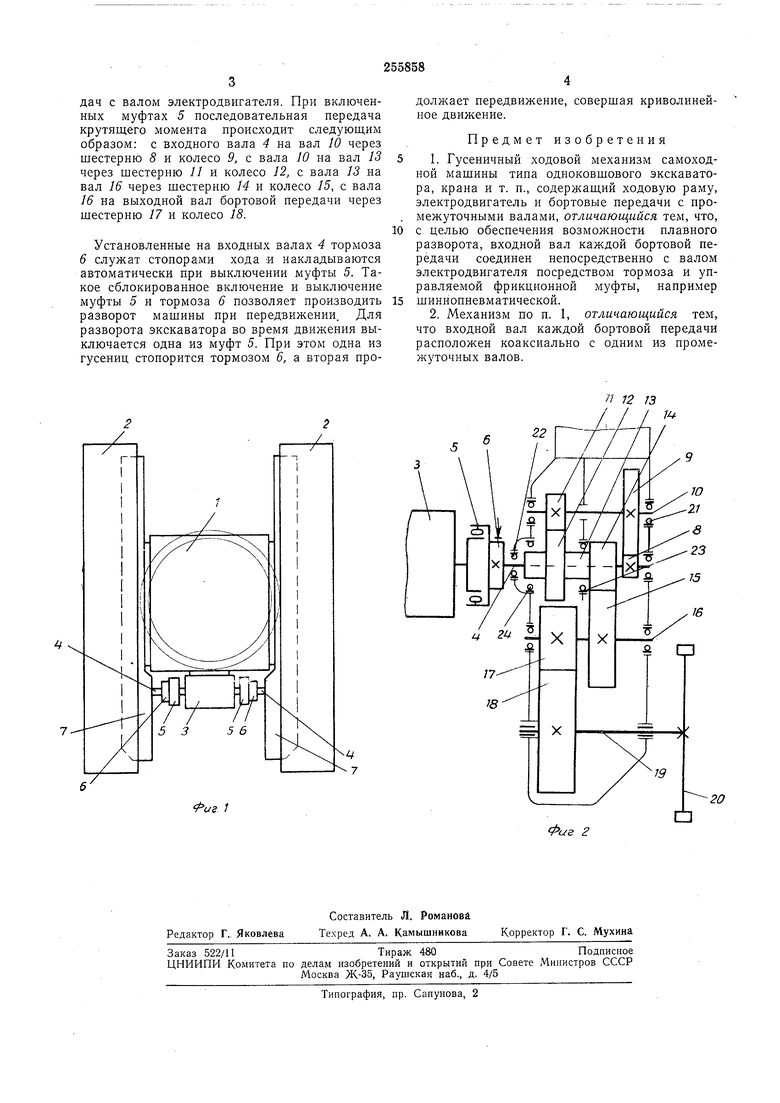
На фиг. 1 изображено описываемое гусеничное ходовое оборудование, в плане; на фиг. 2 - кинематическая схема одной из бортовых передач механизма привода гусениц.
Ходовая рама 1, смонтирована на двух гусеницах 2. На конце ходовой рамы со стороны ведущих колес гусениц закреплен электродвигатель 3. Входные валы 4 бортовых передач соединены с электродвигателем посредством управляемых фрикционных муфт 5, например шиннопневматических. На входных валах 4 бортовых передач установлены тормоза 6. Бортовые передачи раз1меш,ены в гусеничных рамах 7. Бортовые передачи состоят из одинаковых деталей и представляют собой зеркальное отображение друг друга.
На входном валу 4 закреплена шестерня 8, которая входит в зацепление с колесом 9, закрепленным на валу 10. На валу 10 закреплена шестерня 11, которая входит в зацепление
с колесом J2, закрепленным на валу 13. Для того чтобы бортовая передача с передаточным числом, обеспечивающим необходимый момент на ведущем колесе гусеницы, была компактной и могла быть размещена в гусеничной раме, вал 13 выполняется полым и через него свободно проходит входной ва.1 4. Шестерня 14 закреплена на валу 13 и входит в зацепление с калесом 15, которое закреплено на валу 16 (на фиг. 2 колесо 12, вал 13 и
шестерня 14 условно изображены как один блок). На валу 16 закреплена шестерня 17, которая входит в зацепление с колесом 18. Колесо 18 закреплено на выходном валу 19, на другом конце которого закреплено ведущее
колесо гусеницы 20. Входной вал 4 установлен в подшипниках 21 н 22 в разъеме корпуса гусеничной рамы. Вал 13 установлен независимо от входного вала 4 в разъеме корпуса в подшипниках 23 и 24.
Во время движения экскаватора крутящий момент от электродвигателя на ведущие колеса гусениц передается при помощи зубчатых колес и щнннопневматических муфт 5, связывающих входные валы 4 бортовых передач с валом электродвигателя. При включенных муфтах 5 последовательная передача крутящего момента происходит следующим образом: с входного вала 4 на вал 10 через шестерню 8 и колесо 9, с вала 10 на вал 13 через щестерню // и колесо 12, с вала 13 на вал 16 через шестерню 14 и колесо 15, с вала 16 на выходной вал бортовой передачи через шестерню 17 и колесо 18.
Установленные на входных валах 4 тормоза 6 служат стопорами хода и накладываются автоматически при выключении муфты 5. Такое сблокированное включение и выключение муфты 5 и тормоза 6 позволяет производить разворот машины при передвижении. Для разворота экскаватора во время движения выключается одна из муфт 5. При этом одна из гусениц стопорится тормозом 6, а вторая продолжает передвижение, совершая криволинейное движение.
Предмет изобретения
L Гусеничный ходовой механизм самоходной мащины типа одноковшового экскаватора, крана и т. п., содержащий ходовую раму, электродвигатель и бортовые передачи с промежуточными валами, отличающийся тем, что,
с целью обеспечения возмолшости плавного разворота, входной вал каждой бортовой передачи соединен непосредственно с валом электродвигателя посредством тормоза и управляемой фрикционной муфты, например
шиннопневматической.
2. Механизм по п. 1, отличающийся тем, что входной вал каждой бортовой передачи расположен коаксиально с одним из промежуточных валов.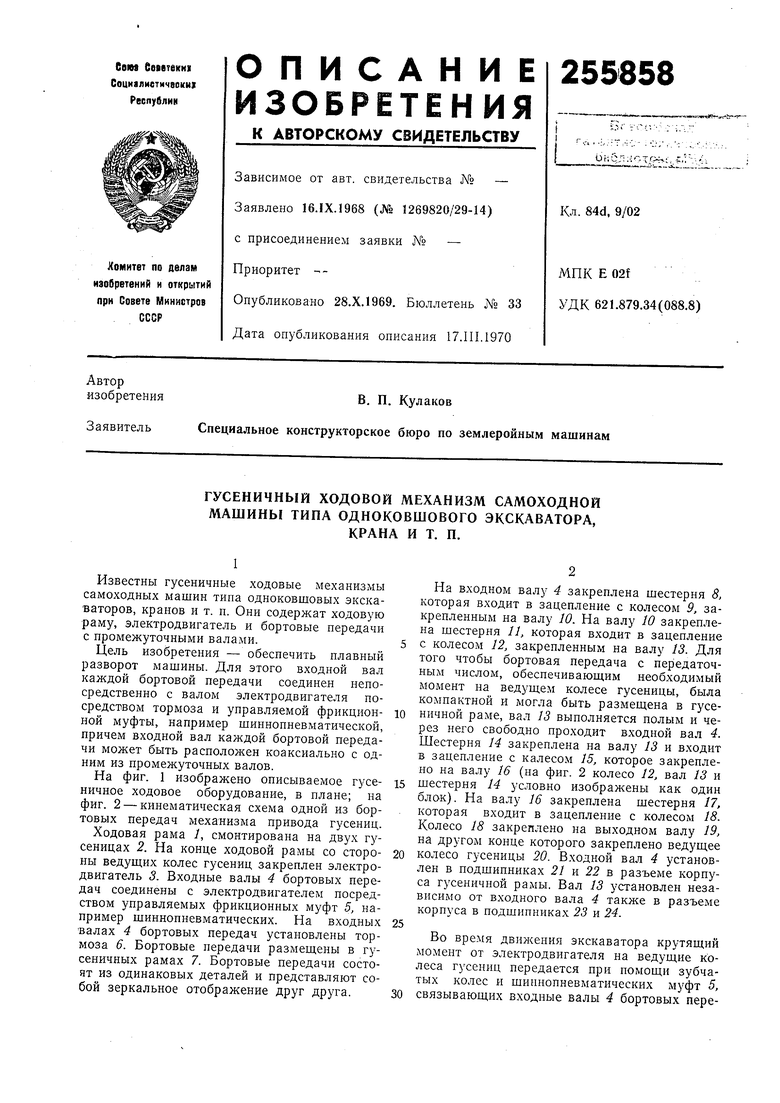
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовой механизм одноковшового экскаватора | 1972 |
|
SU443149A1 |
| Ходовой механизм | 1974 |
|
SU636339A1 |
| Ходовой механизм самоходных машин,имеющих раздельный привод | 1981 |
|
SU968229A1 |
| ХОДОВОЙ МЕХАНИЗМ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1969 |
|
SU240549A1 |
| Трансмиссия самоходной гусеничной машины | 1984 |
|
SU1273291A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ТЯГОВЫЙ МОДУЛЬ ГУСЕНИЧНОЙ МАШИНЫ | 2019 |
|
RU2701084C1 |
| ХОДОВОЙ МЕХАНИЗМ ОДНОКОВШОВОГО ЭК | 1977 |
|
SU825805A1 |
| Механизм маневрирования транспортного средства | 2016 |
|
RU2623465C1 |
| ЭКСКАВАТОР | 2011 |
|
RU2481439C2 |
| ГУСЕНИЧНОЕ ХОДОВОЕ ОБОРУДОВАНИЕ, НАПРИМЕР, ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1965 |
|
SU175896A1 |
;
1
Фиг 2
