Изобретеиие относится к области цифрового управления производственными процессами.
Известны интерполяторы, содержащие блок распределения импульсов по координатам при линейной интерполяции, реверсивные регистры сдвига, сумматоры, узел обнаружения конца кадра и логические с.хемы.
Недостатками известных интерполяторов являются ограниченные функциональные возможности и сложность ввода ис.ходны.х данных.
Предлагаемый интерполятор отличается тем, что он содержит коммутатор режимов, схемы обнаружения нуля, схему обнаружения знака и блок распределения импульсов по координатам или круговой интерполяции, выходы которого подсоединены через схемы «ИЛР1 ко входам сумматоров и через схемы «П и «ИЛИ подключены ко входу блока распределения импульсов по координатам при линейной интерполяции, один -выход которого подсоединен через схему обнаружения знака ко входу блока распределения импульсов по координатам при круговой интерполяции, а другие выходы объединены непосредственно с выходами блока распределения импульсов по координатам при круговой интерполяции, выходы сумматоров подключены через схемы обнаружения нуля ко входам узла обнаружения конца кадра, второй вход которого соединен с выходом блока распределения импульсов по координатам при линейной интерполяции, а третий вход подсоединен к вы.ходу коммутагора режимов, второй выход коммутатора режи.мов подключен к управляющим входам блоков распределения импульсов по координатам при круговой и линейной интерполяции. Это позволяет сократить объем вводимой
информации, расширить функциональные возможности интерполятора и упростить ввод исходных данны.х.
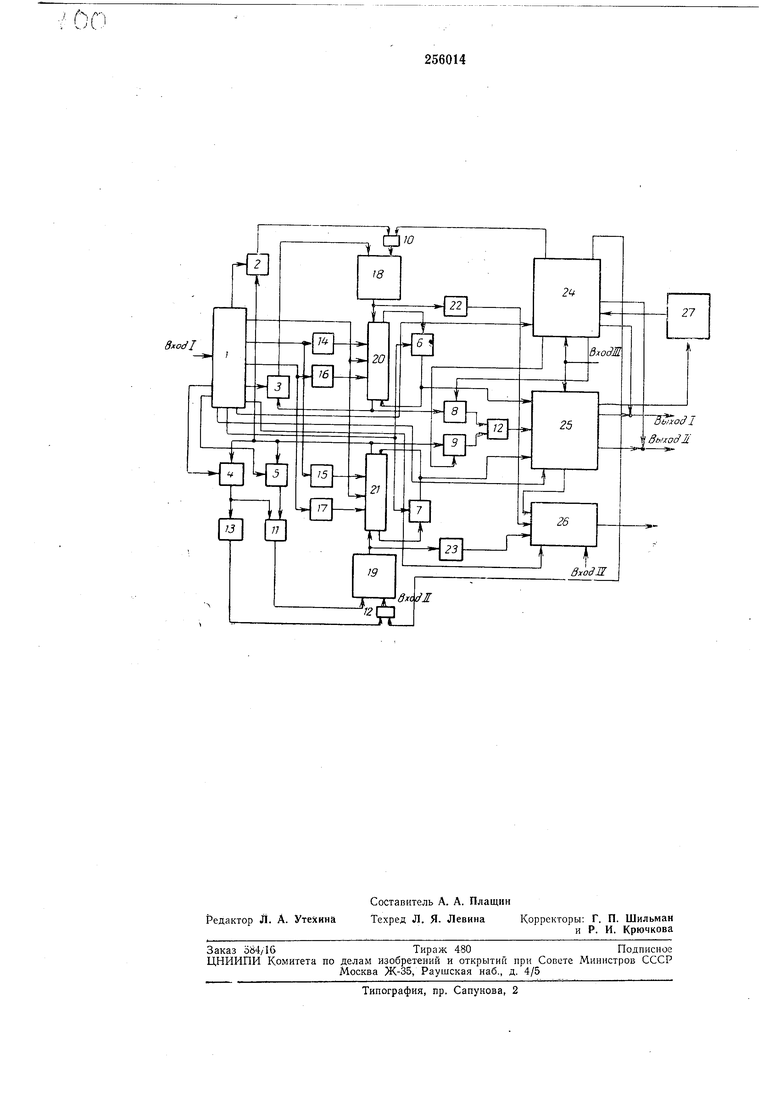
Схема линейно-кругового интерполятора (ЛКИ) с переключаемой логикой показана на
чертеже.
Он содержит коммутатор / режима работы линейно-кругового интерполятора, схемы «И 2 и 3, схему «И 4, выполняющую роль задержки, схемы «И 5-7, схемы «И S и Я
выполняющие функцию задержки, схемы «ИЛИ 10-12 (собирательные схемы), линию задержки УЗ, ключи 14 и 15, управляющие движением числа в регистрах в прямом направлении, ключи 16 и П, управляющие
движением числа в регистрах в обратном направлении, одноразрядные сумматоры 18 и 19, реверсивные регистры 20 и 21, схемы 22 и 23 обнаруж:ения нуля в регистрах (СОН), блок 24 распределения импульсов по коордиблок 25 распределения импульсов по координатам при линейной интерполяции (БРИЛИ), узел 26 обнаружеиия конца кадра, схему 27 обнарул ения знака, входы /-IV вводного устройства и выходы / и // линейно-кругового интерполятора по координатам X и Y.
ЛКИ предназначен для автоматизации процессов рисования и имеет три режима работы:
1режим - поразрядный ввод двоичнодесятичных чисел и преобразование их в двоичный код;
2режим - линейный режим интерполяции;
3режим - круговой режим интерполяции.
Схема работает следующим образом.
Работа ЛКИ всегда начинается с иреобразования значений координат X и Y, представленных в двоично-десятичном коде, в двоичное число.
Работа- преобразователя основана на известном алгоритме: g«-i -f +. + + a,f +
+ (7-1 + ... + o,,
- m
где q - основание системы счисления; i - номер разряда;
n - число разрядов целой части числа; т - число разрядов дробной части числа; а --целые положительные числа от нуля до д, показывающие сколько единиа, -го разряда содержится в числе.
После осуществления всех операций, входящих в алгоритм, получают результат в двоичном коде.
Перед началом работы все узлы J, 4, 5, 11, 13, 15, 21, принимающие участие в преобразовании, устанавливаются в исходное состояние. Работа начинается с подачи на кодовый вход / старшего разряда десятичного числа координаты X в двоичном коде. На пути выхода числа из регистра 21 поставлена схема «И совпадений 4, разрешающая преобразование и одновременно выполняющая роль задержки на один цикл, и линия задержки 13, задерживающая число на два цикла. Задержка на один цикл равносильна умножению на 2, а задержка на два цикла - умножению на 4. Обе задержки, включенные последовательно, дают умножение на 8. На первый вход сумматора через схему «ИЛИ J2 поступает число, умноженное на 8, а на второй вход сумматора - число, умноженное на 2. В сумматоре 19 эти числовые коды складываются и сумма вводится на регистр 21. Таким образом, выполняется операция (а„ 1010). После этого в определенные моменты времени,, т. е. через время , (где п - число двоичных -разрядов, t - время перемещения одного разряда), может вводиться следующий по старщинству десятичный разряд в двоичном коде и выполняется операция (а„ 1010-|-an i), а потом из регистра 21 выполняется операция
(о ,; 1010-j-() (1010). Аналогично вводятС5 II преобразовываются последующие десятичные разряды числа. На время преобразования десятичного разряда числа проход через схему «И 5 блокируется одним из выходов коммутатора 1. Процесс преобразования заканчивается прибавлением к произведению, лолучивщемуся в результате последнего умнол ения на 1010, младшего десятичного числа.
При этом коммутатором / блокируется схема «И 4. В результате получается число, преобразованное в двоичный код, которое передается через схему совпадения «И 2 в накопительиый реверсивный регистр X (18, 20, который на время передачи числа разблокируется коммутатором У.
Па следующем этапе работы выполняется аналогичное преобразование десятичного числа координаты У, которое после преобразования остается в накопительном реверсивном регистре Y (19, 21). После преобразований значений координат X и У можно переходить к одному из режимов интерполяции. При необходимости перехода к линейной интерполяции
коммутатор /по входу // устанавливается на необходимый режим работы. При этом включаются в работу ключи 16, 17 и выключаются ключи 14, 15, изменяются такты коммутатора 1, блокируются схемы «И 3-5 и разблокируются схемы «И 6 и 7, а числа -в реверсивных регистрах 20 и 21 начиают двигаться в обратном наиравлении старщими разрядами вперед. Принцип работы линейного интерполятора
путем реверсирования чисел в регистрах ничем не отличается от приниица работы линейного интерполятора с занолнением опорного счечика многоразрядными кодами.
При необходимости перехода к круговой интериоляции коммутатор / по входу // устанавливается на круговой режим работы, при этом включаются в работу ключи 14-15 и выключаются ключи 16, 17, блокиру отся схемы «И 6, 7, 4 и разблокируются схемы «И 3 и 5.
Числа в регистрах начинают сдвигаться младшими разрядами вперед. В работу подключаются схемы 8, 9, 24, 26, 22, 23.
Принцип работы иптерполятора в круговом режиме основан на известном принципе решения окружности
Xf + 72 1. или Uij ( Ур R (1)
где Xi и YJ - координаты текущей точки окружности;иij - оценочная функция.
Как видно из уравнения (1), текущая точка лежит внутри окружности, если i/ij 0, вне окружности, если Uij 0 и на окружности, если Uij - Q.
При работе в 1-м квадрате по часовой стрелке при щаге по оси У рещается уравнение U;() Uij-2У.--Ы, а при шаге по оси X - V() + 1. ;ыду1дему ее значению необходимо прибавить вычесть) удвоенное зиачеиие текущей коор.ииаты, ио которой делается очередной шаг, 1нрнбавить единицу. Перед началом работы в круговом режиме 20 и 21 заводятся координаты наальной точки обработки окружности. Значеие оценочной функции (//у неред началом аботы всегда нриннмается равным 0. Рассмотрим работу в нервой четверти ири внжеиии текущей точки но часовой стрелке. При нодаче иервого имиульса заданной часоты регистр 20 наиравляет нринюдший имульс на координату Y, так как 0, и одовремеиио блок 24 умеиьщает содержимое егистра К (21) на единицу путем добавления онолнительного кода 1 к его содержимому. Толучеиное новое значение в регистре Y (21) ерез схему 9, выполняющую функцию умно енця на 2, нередается в блок 25 для нахожения нового значения оценочной функции. В авнсимости от знака оценочной функции, коорый определяется в зависимости от знака цепочной функцнн, который оиределяется хемой 27, блок 24 подготавливается к выдас следующего импульса ио нужной коордннае, определяемой знаком оценочной функци. онустнм значение оценочной функции стало ij 0, тогда следуюпIIи импульс блока 2-} аправляется по коордп1|; те А и одновремен0 блок 24 увеличивает содержимое регистра (20} иутем прпбавлеппя содержимому реистра прямого кода 1. Полученное новое знаение X через схему «И S, управляемую блоом 24 и Быиолняюн1ую функцию умнол-сения а 2, постукает в блок 25 с целью получения ового значения оценочной функции. Работа родолжается до тех нор, пока узел 26 не обаружит конец отработки кадра В узел 26 но ходу IV записывается чнсло нереходов в 0 о соответствующим коордннатам. При нолугнии заданного числа переходов в «О узел 6 выдает сигнал об окончании кадра. Схемы 2и 23 обиаруживают иереходы в «О но соответствующим координатам. Узел 26 при обнаружении конца отработки управляется коммутатором /. ЛКИ работать и без преобразования, если на вход / сразу нодавать двоичные числа. ЛКИ может быть выполнен на ФТЯ, выпускаемых серийно нашей промышленностью. Предмет изобретения Линейно-круговой интерполятор е переключаемой логикой, содержащий блок распределения импульсов ио координатам при линейной интерполяции, реверсивные регистры сдвига, сумматоры, узел обнаружения конца кадра и логические схемы, отличающийся тем, что, с целью сокращения вводимой информации, расширения функциональных возможностей и упрощения ручного ввода данных, он содержнт коммутатор , с.хемы обнаружения нуля, схему обнаружения знака и блок распределения импульсов по коордннатам при круговой интерполяции, выходы которого подсоединены через схемы «ИЛИ ко входам сумматоров и через схемы «И и «ПЛИ подключены ко входу блока раснределенпя импульсов ио координатам при линейной интерполяции, один выход которого нодсоедииен через схему обнаружения знака ко входу блока распределения импульсов но коордннатам при круговой интерполяции, а другие ВЫХОД1Я объединены неносредственно с выходами блока раснределенпя импульсов ио координатам прп круговой интерноляцни, выходы сумматоров подключены через схемы обнаруженпя нуля ко входам узла обнаружения конца кадра, второй вход которого соединен с выходом блока раснределения импульсов по координатам прн лннейной интерполяции, а третий вход подсоединен к выходу коммутатора режнмов, второй выход коммутатора режимов подключен к управляющим входам блоков распределения импульсов но координатам прп круговой и линейной интерполяции.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ | 1969 |
|
SU257150A1 |
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Круговой интерполятор с оценочной функцией | 1976 |
|
SU638916A1 |
| Цифровой интерполятор | 1986 |
|
SU1310778A1 |
| ЦИФРОВОЙ ЛИНЕЙНО-КРУГОВОЙ и ЭЛЛИПТИЧЕСКИЙ | 1966 |
|
SU184528A1 |
| Устройство для задания программы | 1979 |
|
SU849148A1 |