Устройство относится 1К области механической обработки металлов давлением, в частности, к гибке нрофилей.
Для гибки Профилей в пространстве -применяют устройство, включающее i opnyc, в котором установлен иневмоцилиндр со штоком, штангу, приводимую в движение пневмоцилиндром поступательно, и механизм движения в вертикальном направлении поводкового конца штанги, воздей€твуюш.его на гибочный ползун.
Однако в известном устройстве механизм В вертикальном направлении поводкового конца штанги выполнен в виде шарнирного соединения штанги со штоком пневмоцилиндра, благодаря чему другой конец штанги имеет возможность перемешаться вместе с гибочным «ползуном по вертикали.
При таком конструктивном выполнении устройства при каждой гибке приходится вручную заправлять поводковый конец штанги на соединение с гибочным ползуном, что представляет неудобство и вызывает снижение производительности труда.
Вместе с тем только в одном положени-и, когда поводОК штанги лежит на одной оси со штоком пневмоцилиндра, не образуется вертикальная составляющая прижимного усилия. Во всех других положениях действует
вертикальная составляющая прижимного усилия. Она весьма отрицательно отражается на работоспособности устройства, так как образуется опрокидывающий момент, вырывающий Ползун.
В предлагаемом изобретении для устранения опрокидывающего момента, воздействующего на гибочный пуансон, шток пневмоцилиндра закреплен неподвижно в корпусе, а цилиндр установлен подвижно торцовой стороной к столу станка и имеет в этой части паз для механизма вертикального неремещеиия штанги, включающего в себя блок игольчатых подщипников, несущий новоротную на 5 цаифе вилку, заключающую поводковый конец щтанги, второй конец которой несет горизонтальную и вертикальную оси качения щтаиги, вынесенные в сторону от оси нневмоцплиндра, Причем для регулировки верти0кального Положения поводкового конца штанги цапфа вилки имеет шестерню в зацеплении с вертикальной рейкой, -которая упирается регулируемым концом в аюдпружиненный на блоке упор.
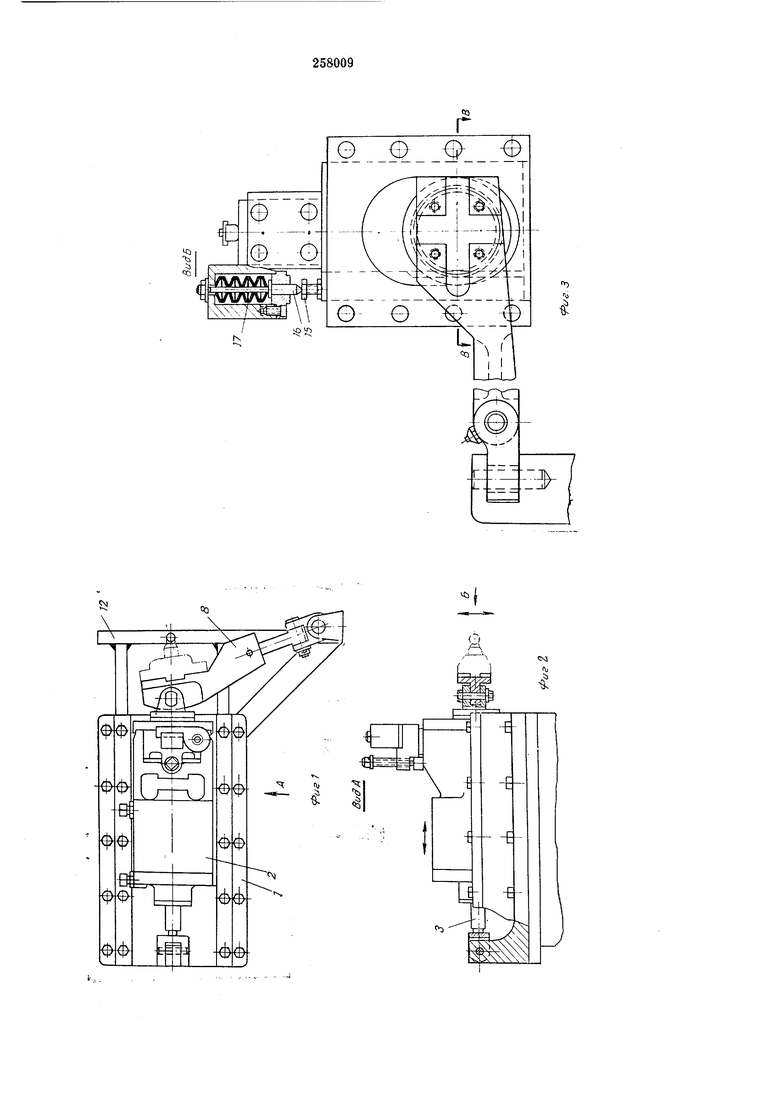
На фнг. 1 показано описываемое устрой5ство (штр1{х-нунктирной линией показан шарнирный поводок); на фиг. 2-вид по стрелке А на фиг. 1; на фиг. 3 - вид по стрелке Б на фиг. 2; на фиг. 4--сечение по В-В на фиг. 3.
Головка содержит корПус 1, подвижно установлеиный в корпусе торцом к поворотному Столу станка, пневмоцилиндр 2, шток 3, неподвижно закрепленный в корпусе, вертикальный- паз 4 в пиевмоцилиндра, блок 5 на игольчатых подшипниках 6, поворотную вилку 7, штангу 8, новодковый конец которой заключен в паз вилки 7, поводковый шарнир 9, ось 10 горизонтального и ось 11 вертикального перемещения штанги, а также кронштейн 12. На цапфе вилки имеется шестерня 13 в заценлении с рейкой 14, несущей регулируемый упор 15, воздействующий на приемный упор 16, который подпружинен упругим элементом 17, на кор-нус блока 5. Имеется винт 18, который удерживает с упором на корпус вес механизма вертикального перемещения поводкового конца штанги 8 во время наладки станка,
Штннга 8 и блок 5 В1месте со всеми подвижными элементами под действием веса стремится занять нижнее положение. Но при этом штанга 8 воздействует на паз вилки 7 и поворачивает ее вместе с шестерней 13 по часовой стрелке. В силу этого рейка 14 нереД1ещается вверх и регулируемым упором 15 воздействует на подпружиненный приемный упор 16, который воздействует на упругий элемент 17 (тарельчатые пружины), почти сжимая его, так как сила упругости пружины значительно больше силы веса, передаваемой через упор 15. В этот поводковый шарнир 9 занимает определенное положение ПО вертикали относительно стола. Включается пневмоцилиндр 2. Шток 5 остается неподвижным, а .цилиядр перемещается по направлению к столу. Штанга 8 новорачивается относительно вертикальной оси 11, и поводковый шарнир 9 прижимает тибочный ползун к матрице. Начинается гибка. Ручей гибочного приспособления увлекает через гибочный ползун поводковый конец штанги 8, а с ним-вилку 7 и блок 5 по вертикальному пазу 4, благодаря чему лрижимное усилие действует всегда в горизонтальной ПЛОСКОСТИ. Это гарантирует отсутствие
опрокидывающего момента и устойчивость гибочного ползуна.
Если в -процессе гибки поводковый конец штанги опускается вниз, то шестерня 13 поворачивается по часовой стрелке, рейка 14 идет взерх и упругийэлемент 17 сжимается, давая возможность перемещаться гибочному ползуну. Если же поводковый конец поднимается, то все идет в обратном порядке и в
конце концов возможно положение, в котором упор 15 времеппо выйдет из контакта с приемным упором 16. При окончании гибки поводковый конец шта-нги встанет ъ исходное положение.
Во время перемещения яоводкового конца штанги по вертикали, работают обе оси поворота штанги: ось 10 горизонтального и ось // вертикального перемещения. Эти оси воспринимают на себе боковое усилие, действующее вдоль штанги в процессе гибки при вращении стола, благодаря чему блок 5 практически разгружен от действия боковой силы.
Предмет изобретения
Устройство к станку для гибки профилей в пространстве, содержащее корпус, механизм гибки, выполненный в виде подвижного
приводного цилиндра и штанги, имеющей на одном конце сферическую опору, установленную в гибочном ползуне, а также механизм перемещения штанги в вертикальной плоскости, отличающееся тем, что, с целью повышения производительности, механизм перемещения штанги в вертикальной плоскости выполнен в виде закрепленной на торце приводного цилиндра зубчатой рейки и входящей с ней в зацепление шестерни, сидящей
на валу, смонтированном в корпусе, снабженном вилкой, связанной со штангой со стороны расположения сферической опоры, при этом другой конец штанги соединен -посредством двойного шарнира с корпусом, в котором установлен подпружиненный упор, .регулирующий величину хода рейки.
:: ао
8
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РУЛОНОВ НА БАРАБАН МОТАЛКИ | 1993 |
|
RU2093289C1 |
| Машина для пакетировки и обвязки проволокой сортового проката | 1969 |
|
SU441992A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Многоместное делительное устройство | 1980 |
|
SU918024A1 |
| УСТАНОВКА ДЛЯ ГИБКИ ТРУБ ДЛЯ ЗЛ^ЕЕВИКОВ | 1973 |
|
SU408690A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ СПИРАЛЕОБРАЗНЫХ ИЗДЕЛИЙ ИЗ ПРОВОЛОЧНЫХ ЗАГОТОВОК | 1991 |
|
RU2013174C1 |
| Станок для гибки трубных панелей | 1975 |
|
SU562345A1 |
| Станок для гибки змеевиков | 1985 |
|
SU1333437A2 |
| Устройство для многоколенной пространственной гибки труб | 1985 |
|
SU1268245A1 |
| Станок для гибки стержней обмоток электрических машин | 1982 |
|
SU1051656A1 |

-
Фиг
