113334372
Изобретение относится к специаль- нем цилиндром 23-, шток которого сое- ному трубогибочному оборудованию и динен с верхним полушаблоном 2А, может быть использовано в различных На корпусе суппорта 5 жестко смон- отраслях машиностроения, в частности тирована шестерня 25 и поворотная по- в энергомашиностроении.луобойма 26 с направляющим пазом 27
Цель изобретения - расширение тех- для перемещения рейки 15. На полу- нологических возможностей станка за обойме 26 жестко закреплен фиксатор счет обеспечения формообразования на 28, периодически фиксирующий зубчатую змеевике концевых гибов с углами , Q рейку 13 с полуобоймой, меньшими .180, направленных в сторону Полуобоймы 11 и 26 снабжены нап- собираемого со змеевиком узла. равляющими 29 и 30, взаимодействующими
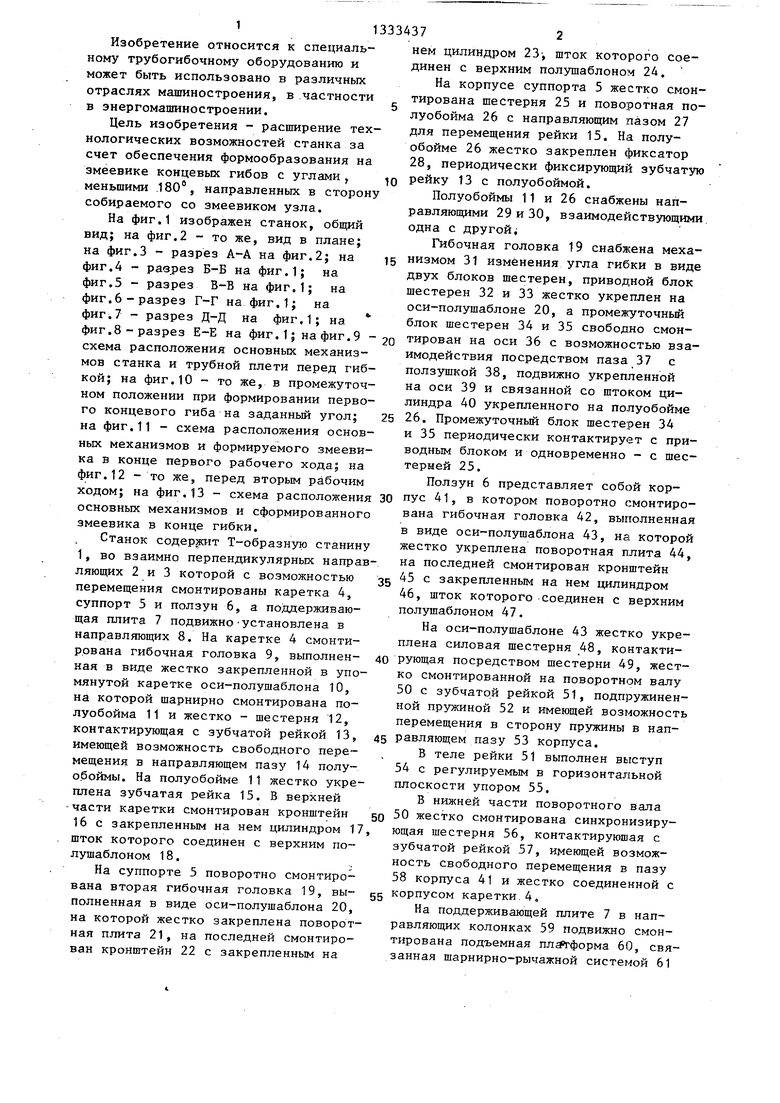
На фиг.1 изображен станок, общий одна с другой
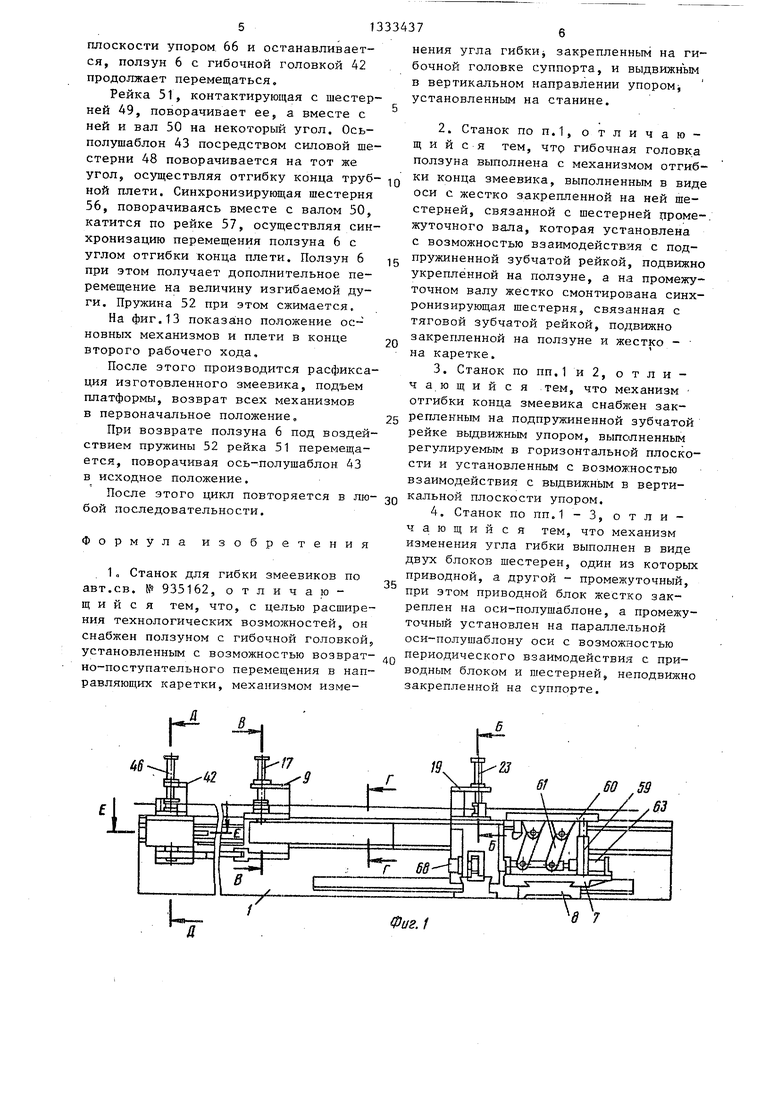
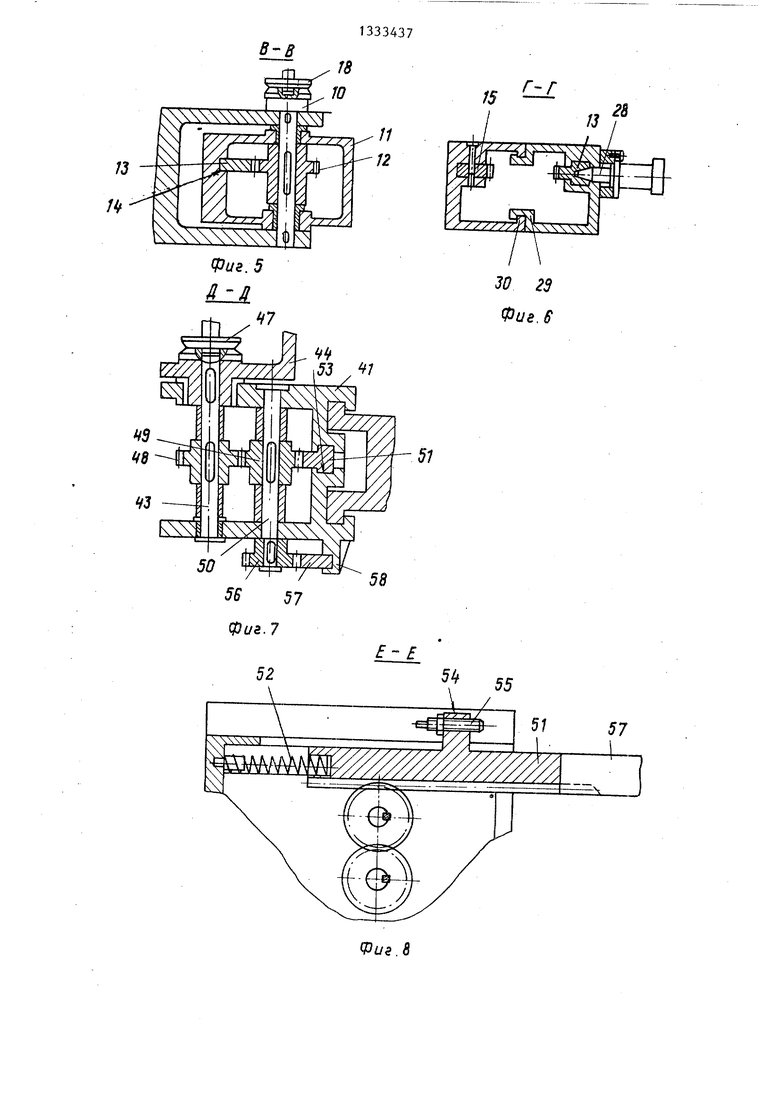
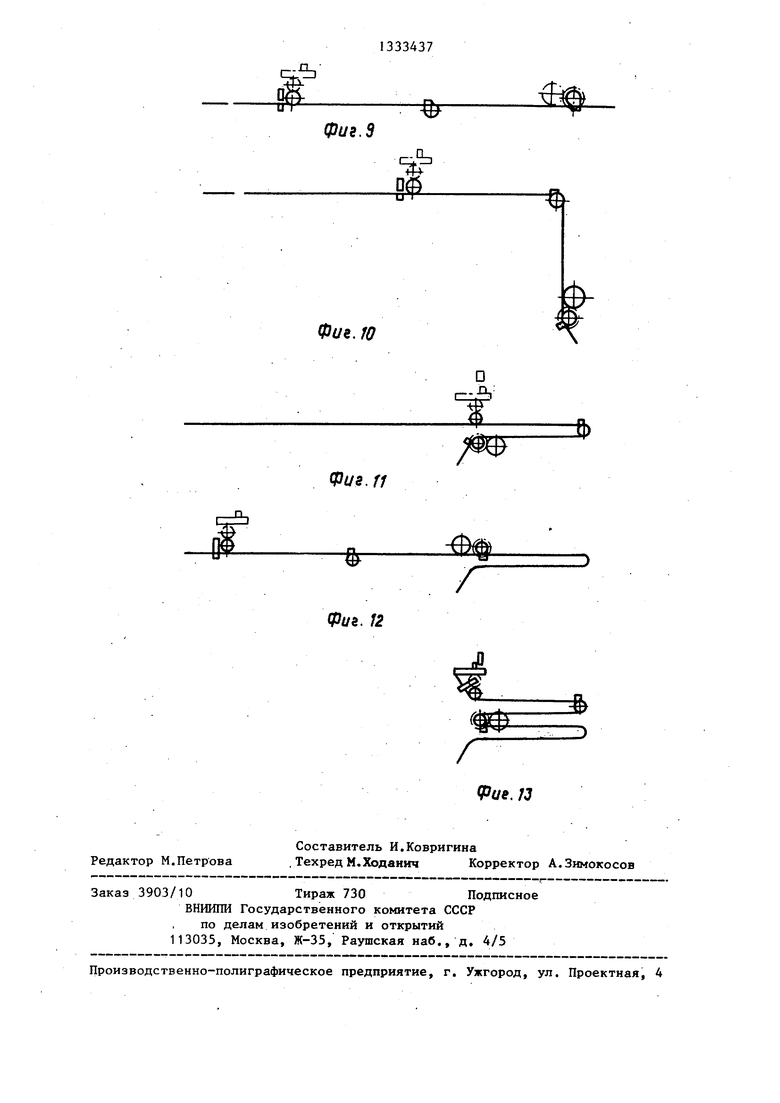
вид; на фиг,2 - то же, вид в плане; Гибочная головка 19 снабжена меха- на фиг.З - разрез А-А на фиг.2; на g низмом 31 изменения угла гибки в виде фиг.4 - разрез Б-Б на фиг.1; на двух блоков шестерен, приводной блок фиг.5 - разрез В-В на фиг.1; на шестерен 32 и 33 жестко укреплен на фиг.6-разрез Г-Г на фиг.1; на оси-полушаблоне 20, а промежуточный фиг.7 - разрез Д-Д на фиг.1; на блок шестерен 34 и 35 свободно смон- фиг.8-разрез Е-Е на фиг.1; на фиг.9 - 2о тирован на оси 36 с возможностью вза- схема расположения основных механиз- имодействия посредством паза 37 с мов станка и трубной плети перед гиб- ползушкой 38, подвижно укрепленной кой; на фиг. 10 - то же, в промежуточ- на оси 39 и связанной со штоком ци- ном положении при формировании перво- линдра 40 укрепленного на полуобойме го концевого гиба на заданный угол; 25 26. Промежуточный блок шестерен 34 на фиг.11 - схема расположения основ- и 35 периодически контактирует с при- ных механизмов и формируемого змееви- водным блоком и одновременно - с шес- ка в конце первого рабочего хода; на терней 25.
ф|иг.12 - то же, перед вторым рабочим Ползун 6 представляет собой кор- ходом; на фиг.13 - схема расположения 30 пус 41, в котором поворотно смонтиро- основных механизмов и сформированного вана гибочная головка 42, выполненная змеевика в конце гибки.в виде оси-полушаблона 43, на которой
Станок содержит Т-образную станину жестко укреплена поворотная плита 44, 1, во взаимно перпендикулярных направ- ма последней смонтирован кронштейн ляющих 2 и 3 которой с возможностью 35 - закрепленным на нем щ линдром перемещения смонтированы каретка 4, 46, шток которого соединен с верхним суппорт 5 и ползун 6, а поддерживаю- полушаблоном 47.
щая плита 7 подвижно установлена в На оси-полушаблоне 43 жестко укре- направляющих 8. На каретке 4 смонти- плена силовая шестерня 48, контакти- ррвана гибочная головка 9, выполнен- 40 рующая посредством шестерни 49, жест- ная в виде жестко закрепленной в упо- ко смонтированной на поворотном валу мянутой каретке оси-полушаблона 10, 50 с зубчатой рейкой 51, подпружинен- на которой шарнирно смонтирована по- ной пружиной 52 и имеющей возможность луобойма 11 и жестко - шестерня 12, перемещения в сторону пружины в нап- контактирующая с зубчатой рейкой 13, 45 равляющем пазу 53 корпуса, имеющей возможность свободного пере- , В теле рейки 51 выполнен выступ мещения в направляющем пазу 14 полу- 54 с регулируемым в горизонтальной обоймы. На полуобойме 11 жестко укре- плоскости упором 55. плена зубчатая рейка 15. В верхней В нижней части поворотного вала -части каретки смонтирован кронштейн 50 жестко смонтирована синхронизиру- 16 с закрепленным на нем цилиндром 17, ющая шестерня 56, контактируюшая с шток которого соединен с верхним по- зубчатой рейкой 57, имеющей возмож- лушаблоном 18.ность свободного перемещения в пазу
На суппорте 5 поворотно смонтиро- 58 корпуса 41 и жестко соединенной с вана вторая гибочная головка 19, вы- 55 корпусом каретки.4. полненная в виде оси-полушаблона 20, На поддерживающей плите 7 в нап- на которой жестко закреплена поворот- равляющих колонках 59 подвижно смон- ная плита 21, на последней смонтиро- тирована подъемная платформа 60, свя- ван кронштейн 22 с закрепленным на занная шарнирно-рычажной системой 61
и фиксатором 62 со штоком цилиндра 63, жестко закрепленного на плите. Плита взаимодействует с упором 64 кронштейна 65, укрепленного на суппорте.
На станине 1 смонтирован вьщвижно в вертикальной плоскости упор 66.
Перемещение каретки 4 и суппорта 5 по взаимно перпендикулярным направ ляющим 2 и 3 осуществляется соответственно от гидродвигателей 67 и 68 посредством шестеренно-реечньгх передач 69.
Гибочные головки 9 и 19 снабжены прижимами 70 с приводными цилиндрами 71, а гибочная головка 42 - прижимом 72 с приводным цилиндром 73.
Станок для гибки змеевиков работает следующим образом.
В исходном положении перед гибкой верхние полушаблоны 18, 24 и 47 под- няты, подъемная платформа 60 опущена
В конце первого рабочего хода угол гиба трубы на гибочной головке 9 каретки равен 180°, а на гибочной головке 19 суппорта 5 - менее 180° и зависит от передаточного отношения
30
поддерживающая плита 7 находится в
крайнем переднем положении и соедине- 25 механизма изменения угла гибки.
на с кронштейном 65 суппорта 5 пос- После этого производится расфиксация изгибаемой плети и поддерживающей плиты 7, подъем платформы 60 и возврат всех механизмов в исходное положение.
В исходном положении перед вторым рабочим ходом выдвижной в вертикальной плоскости упор 66 выводится в рабочее положение, рейка 13 жестко фиксируется на полуобойме 26. Шестерни 34 и 35 выводятся из зацепления.
Включением цилиндров 17, 23 и 26 осуществляется смыкание полушаблонов гибочных головок 9, 19 и 42. Включе-
суппорта, а шестерня 35 - с шестерней о нием цилиндров 71 и 73 производят за32, в результате чего ось-полушаблон жим изгибаемой части трубной плети.
0 имеет возможность замедленного по- .ворота.
Трубная плеть подается на заданный
размер в ручьи нижних осей-полушабло- 45 лярным направляющим. При этом полунов 10, 20 и 43, после чего включени- обоймы 11 и 26 поворачиваются вокруг
ем цилиндров 17 и 23 осуществляется
редством фиксатора 62, вьщвижной в вертикальной плоскости упор 66 отведен, рейка 13 расфиксирована.
Для получения змеевика с формированием концевых гибов на заданный угол механизм 31 изменения угла гибки настраивается следующим образом.
Включением цилиндра 40 на выталкивание штока ползушка 38, перемещаясь, вверх по оси 39, воздействует через паз 37 на блок шестерен 34 и 35 так, что шестерня 34 контактирует с неподвижной шестерней 25 гибочной головки
35
Включением гидродвигателей 67 и 68 осуществляется перемещение каретки 4 и суппорта 5 по взаимно перпендикусмыкание осей-полушаблонов 10 и 20 и зажим изгибаемой части трубной плети.
Включением гидродвигателей 67 и 68 осуществляется перемещение каретки 4 и суппорта 5 по взаимно перпендикулярным направляющим 2 и 3 и, следовательно, поворот полуобойм 11 и 26 вокруг осей-полушаблонов 10 и 20, при этом расфиксированная рейка 13 обкатывается вокруг шестерни 12 и свободно перемещается в пазу полуобоймы 11,
50
55
своих осей-полушаблонов, рейка 13, обкатываясь вокруг шестерни 12 на некоторый угол, сближает центры осей- полушаблонов 10 и 20, осуществляя синхронизацию их перемещения, шестерня 33 катится по рейке 15 и поворачивает ось-полушаблон 20 на тот же угол. Ползун 6 при этом перемещается со скоростью каретки 5. В конце второго рабочего хода подпружиненная рейка 51 своим выдвижным в горизонтальной плоскости упором 55 взаимодействует с вьщвижным в вертикальной
0
а рейка 15 обкатывается вокруг шестерни 33 приводного блока.
При вращении полуобоймы 26 вокруг оси-полущаблона 20 щестерня 34, обкатываясь по неподвижной щестерне 25, передает вращение на щестерню 35, которая, взаимодействуя с шестерней 32, вращает приводной блок шестерен 32 и 33, а с ним и ось-полушаблон 20 с замедленной угловой скоростью.
Рейка 15, обкатываясь вокруг шестерни 33 приводного блока, сближает оси-полушаблоны 10 и 20 навстречу 5 одна Другой, обеспечивая синхронизацию расстояния между ними. Ползун 6 при этом перемещается по направляющим вместе с трубной плетью с той же скоростью, что и каретка 4.
В конце первого рабочего хода угол гиба трубы на гибочной головке 9 каретки равен 180°, а на гибочной головке 19 суппорта 5 - менее 180° и зависит от передаточного отношения
жим изгибаемой части трубной плети.
Включением гидродвигателей 67 и 68 осуществляется перемещение каретки 4 и суппорта 5 по взаимно перпендикуобоймы 11 и 26 поворачиваются вокруг
0
5
своих осей-полушаблонов, рейка 13, обкатываясь вокруг шестерни 12 на некоторый угол, сближает центры осей- полушаблонов 10 и 20, осуществляя синхронизацию их перемещения, шестерня 33 катится по рейке 15 и поворачивает ось-полушаблон 20 на тот же угол. Ползун 6 при этом перемещается со скоростью каретки 5. В конце второго рабочего хода подпружиненная рейка 51 своим выдвижным в горизонтальной плоскости упором 55 взаимодействует с вьщвижным в вертикальной
плоскости упором 66 и останавливается, ползун 6 с гибочной головкой 42 продолжает перемещаться.
Рейка 51, контактирующая с шестерней А9, поворачивает ее, а вместе с ней и вал 50 на некоторый угол. Ось- полушаблон 43 посредством силовой шестерни 48 поворачивается на тот же
угол, осуществляя отгибку конца труб- Q ки конца змеевика, выполненным в виде
ной плети. Синхронизирующая шестерня 56, поворачиваясь вместе с валом 50, катится по рейке 57, осуществляя синхронизацию перемещения ползуна 6 с углом отгибки конца плети. Ползун 6 при этом получает дополнительное перемещение на величину изгибаемой дуги. Пружина 52 при этом сжимается.
На фиг, 13 показа но положение основных механизмов и плети в конце второго рабочего хода,
После этого производится расфикса- ция изготовленного змеевика, подъем платформы, возврат всех механизмов в первоначальное положение.
При возврате ползуна 6 под воздействием пружины 52 рейка 51 перемещается, поворачивая ось-полушаблон 43 в исходное положение,
После этого цикл повторяется в любой последовательности.
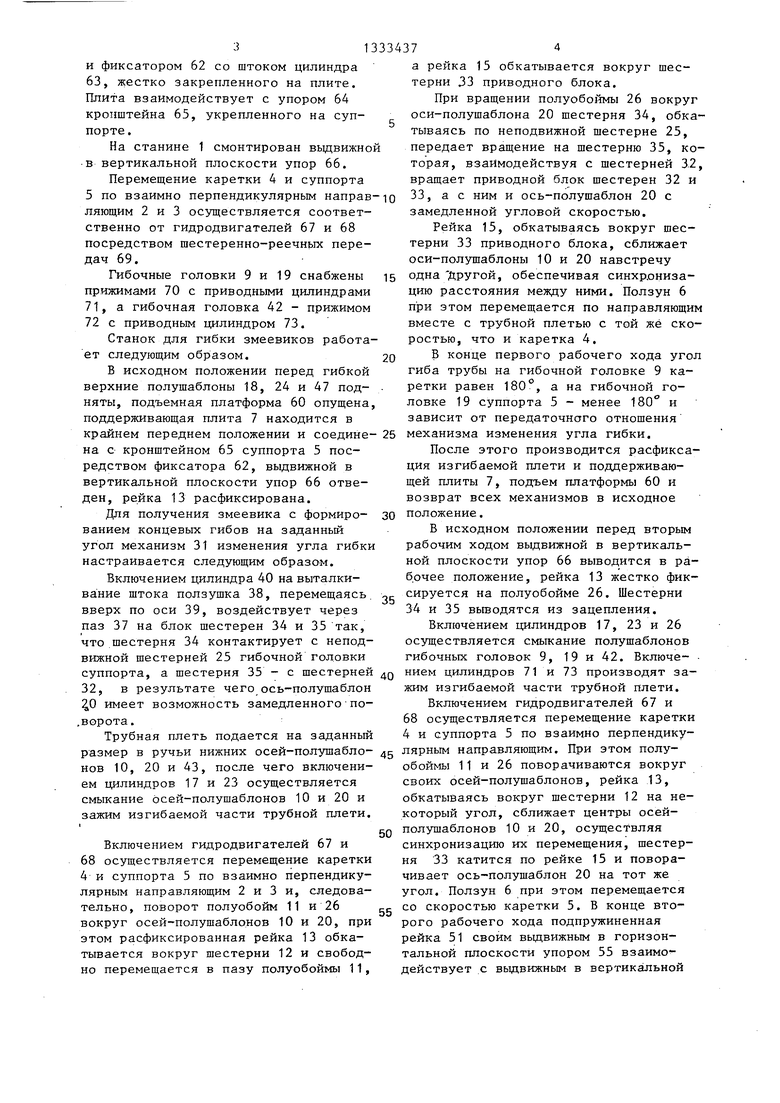
Формула изобретения
1 о Станок для гибки змеевиков по авт.св. № 935162, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен ползуном с гибочной головкой, установленным с возможностью возвратно-поступательного перемещения в направляющих каретки, механизмом изме15
20
25
30
35
40
ОСИ с жестко закрепленной на ней шестерней, связанной с шестерней цроме-. жуточного вала, которая установлена с возможностью взаимодействия с подпружиненной зубчатой рейкой, подвижно укрепленной на ползуне, а на промежуточном валу жестко смонтирована синхронизирующая шестерня, связанная с тяговой зубчатой рейкой, подвижно закрепленной на ползуне и жестко - на каретке.
3,Станок по пп,1 и 2, отличающийся тем, что механизм отгибки конца змеевика снабжен закрепленным на подпружиненной зубчатой рейке вьщвижным упором, выполненным регулируемым в горизонтальной плоскости и установленным с возможностью взаимодействия с выдвижным в вертикальной плоскости упором,
4,Станок по пп.1 - 3, отличающийся тем, что механизм изменения угла гибки выполнен в виде двух блоков шестерен, один из которых приводной, а другой - промежуточный, при этом приводной блок жестко закреплен на оси-полушаблоне, а промежуточный установлен на параллельной оси-полушаблону оси с возможностью периодического взаимодействия с приводным блоком и шестерней, неподвижно закрепленной на суппорте.
нения угла гибкиj закрепленным на гибочной головке суппорта, и выдвижн ым в вертикальном направлении ynopoMj установленным на станине.
2. Станок ПОП.1, отличающийся тем, что гибочная головка ползуна выполнена с механизмом отгибки конца змеевика, выполненным в виде
ОСИ с жестко закрепленной на ней шестерней, связанной с шестерней цроме-. жуточного вала, которая установлена с возможностью взаимодействия с подпружиненной зубчатой рейкой, подвижно укрепленной на ползуне, а на промежуточном валу жестко смонтирована синхронизирующая шестерня, связанная с тяговой зубчатой рейкой, подвижно закрепленной на ползуне и жестко - на каретке.
3,Станок по пп,1 и 2, отличающийся тем, что механизм отгибки конца змеевика снабжен закрепленным на подпружиненной зубчатой рейке вьщвижным упором, выполненным регулируемым в горизонтальной плоскости и установленным с возможностью взаимодействия с выдвижным в вертикальной плоскости упором,
4,Станок по пп.1 - 3, отличающийся тем, что механизм изменения угла гибки выполнен в виде двух блоков шестерен, один из которых приводной, а другой - промежуточный, при этом приводной блок жестко закреплен на оси-полушаблоне, а промежуточный установлен на параллельной оси-полушаблону оси с возможностью периодического взаимодействия с приводным блоком и шестерней, неподвижно закрепленной на суппорте.
6
61 ВО 53
/ /..62 x-j::.;:- л. Xi. -НА-/-
Фи2.1
./ . f
/
66
60
гттт)
/
liiiiiiiiii iiiimiiiiiiiiiiiiiiiXiiii iiTiT tryfiiiiiiiii л I и I I liiiiiiiii
IT .rJDT
-t
ч:-1-i
I и
IT .rJDTt
Фиг. 2
A-A
36
uL
5-5
25
26
32
(риг.З
фиг.
Г-Г
2В
Pus.8
-Jb
фиг.З
A
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1985 |
|
SU1400711A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Станок для гибки змеевиков | 1985 |
|
SU1248692A1 |
| Станок для гибки змеевиков | 1979 |
|
SU854507A1 |
| Станок для изготовления змеевиков | 1980 |
|
SU946724A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ СЛОЖНОЙ ФОРМЫ ИЗ ДЛИННОМЕРНЫХ ТРУБНЫХ ПЛЕТЕЙ И ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2038886C1 |
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1411075A1 |
| Станок для гибки змеевиков | 1984 |
|
SU1207562A2 |
Изобретение относится к трубо- гибочному оборудованию и может быть использовано в различных областях машиностроения. Изобретение позволяет расширить технологические возможности устройства. Станок снабжен ползуном с дополнительной гибочной головкой и механизмом изменения угла гибки, закрепленным на гибочной головке суппорта. При этом дополнительная гибочная головка выполнена с механизмом отгибки конца змеевика. Механизм отгибки конца эмеевика имеет регулируемый в горизонтальной плоскости выдвижной упор, взаимодействующий с вьщвижным в вертикальной плоскости упором. Механизм изменения угла гибки выполнен в виде приводного и промежуточного блоков шестерен. Станок позволяет изготавливать плоские змеевики различной формы и габаритов с концами, отогнутыми в сторону собираемого с ними узла. 3 з.п. ф-лы, 13 ил. i (Л оо со со 4 со 
Фиг. Ю
Фиг. п
Фиг. 12
Редактор М.Петр ова
Составитель И.Ковригина , Техред М.Ходанич Корректор А.Зимокосов
Заказ 3903/10Тираж 730Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фие. /J
| Станок для гибки змеевиков | 1980 |
|
SU935162A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
