Известны двухдвигательные синхронизированные электроприводы, содержащие устройство для динамического торможения входящих в них двигателей постоянного тока. Однако такие электроприводы не исключают возможности возникновения механических напряжений и ударов, если по каким-либо причинам тормозится только один из двигателей.
Если механическая связь обоих приводных электродвигателей осуществляется посредством длинных валов, как, например, у манипуляторов реверсивных обжимных нрокатных станов, то одним из основных требований при работе такого механизма является обеспечение равномерной нагрузки двигателей во всех режимах. Если двигатели имеют различные характеристики, то возникают добавочные механические напрял ения в соединительных валах и других звеньях. Аналогично, если двигатели имеют электрическую систему синхронизации, все щире применяющуюся, например, для нажимных винтов прокатных станов, то синхронное вращение их также необходимо обеспечить во всех режимах, включая режим динамического торможения. При этом в обоих случаях при помощи существующих систем автоматического регулирования удается соответственно либо выравнивать нагрузки двигателей, либо обеспечивать с заданной точностью синхронное вращение их, «о все это
только в нормальных режимах. В то же время при срабатывании защиты от обрыва поля приводные электродвигатели переходят в режим динаашческого торможения, и какое-либо воздействие на них со стороны системы автоматического регулирования исключается. При этом электродвигатель, цепь обмотки возбуждения которого оборвана, не может перейти в режим динамического торможения,
поскольку поток у этого двигателя отсутствует. Следовательно, в режиме динамического тормол ения, когда тормозится только один из двух двигателей, возникает либо скручивание их соединительных валов, либо недопустимое рассогласование синхронизируемых в основном рабочем режиме механизмов. При наличии .безредукторного электропривода с тихоходными электродвигателями, когда, как правило, отсутствуют механические тормоза,
для обеспечения наименьшего пути торможения применяют двухступенчатое динамическое торможение.
В предложенном электроприводе обеспечивается повыщение надежности торможения
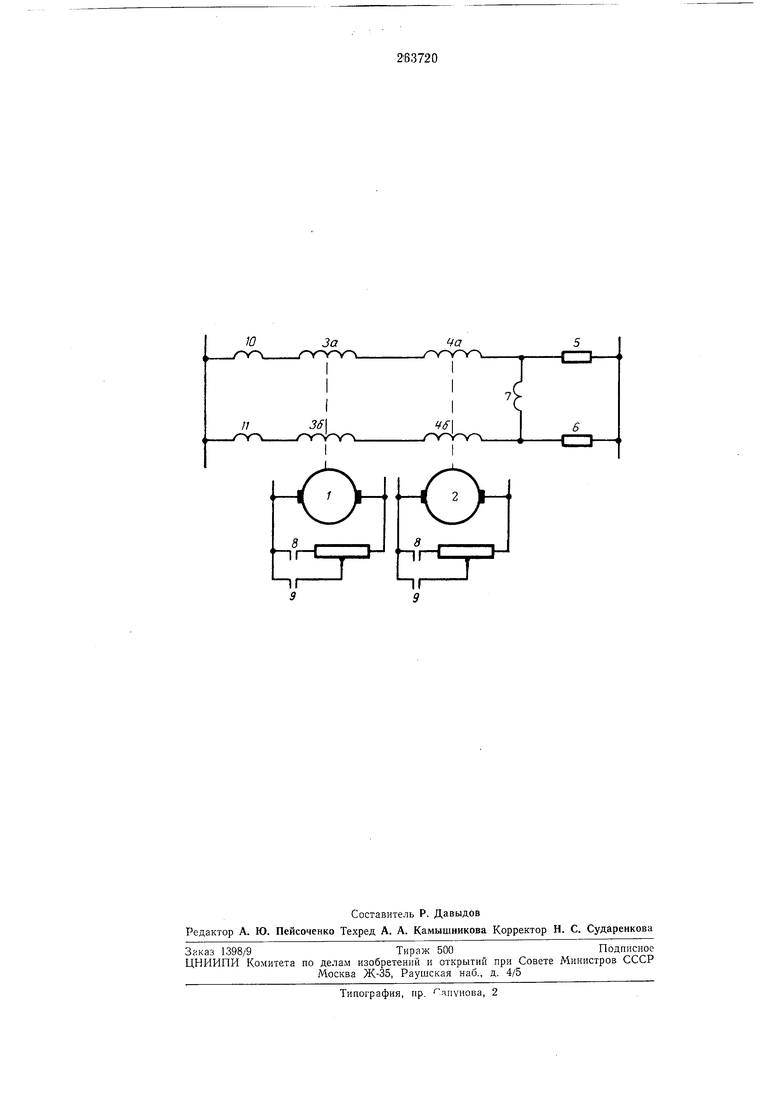
путем исключения перенапряжений в элементах передачи, связывающ.ей двигатели. Это достигается тем, что обмотка возбуждения каждого двигателя выполнена двухсекционной при последовательном соединении секций 3 секций подключены к источнику постоянного тока через юстировочные сопротивления. Для обеспечения селективности и иптенсивности динамического торможения при обрыве одпой из цепей возбул дения в диагональ5 лтоста, образованного парами .секций и юстировочными сопротивлениями, включена обмотка токового реле, контакты которого подключены к устройству динамического торможеиия.10 Па чертеже представлена принципиальная схема цепи возбул дения двигателей описываемого электропривода. Двигатели 1 и 2 имеют облютки возбуждения, разделенные соответственно на секции15 За, 36 и 4а, 46, Секции За, 4а и 36, 46 сое,динены последовательно и подклЕОчены к источнику постоянного тока через юстировочные сопротивления 5 и 5 соответственно. В диагональ моста, образованного парами секций За,20 4а и 36, 46 включена обмотка 7 такового реле, контакты которого подключены к устройству динамического торможения. Контакторы 8 и 5 устройства динамического торможения подключают к якорям двигателей / и 225 соответственно первую и вторую ступени динамического торможения. В цепи возбуждения включены обмотки 10 и // реле обрыва поля. При обрыве одной из цепей возбуждения30 под током остается другая цепь, также состоящая из .секций возбуждения первого и второго двигателей, и поэтому каждый из них имеет половинную намагничиваюшую силу. Вследствие этого оба электродвигателя тор-35 мозятся в одинаковой степени, что исключает скручивание валов (в случае механической связи электродвигателей) либо недопустимое рассогласование исполнительных органов механизма (при электрической синхронизации40 в нормальном рабочем режиме). Величина тормозного момента каждого из двигателей в данном случае уменьщается (при обрыве одной из секций и наложении динамического торможения) примерно в четыре раза45 по сравнению с моментом динамического торможения при полном потоке возбуждения. Это происходит в связи с тем, что при половинной намагничивающей силе и .соответствующей половинной э.д.с. двигателя ток динамическо-50 го торможения также уменьшается, а тормозной момент пропорционален произведению потока .на ток. Чтобы сохранить тормозной ток двигателей неизменным, необходимо при Обрыве одной из цепей секций За, 4а или 36,55 46 вводить сопротивление второй ступени сопротивления динамического торможения, неличина которого при половинном потоке электродвигателя обеспечивает допустимый ток динамического торможения. Для этого в60 диагональ моста, .образованного секциями возбуждения и юстировочными сопротивлениями 5 и 6, включена обмотка 7 токового реле. Тогда из-за разбаланса моста, возникаю4щего при обрыве одной из цепей возбуждения двигателей, срабатывает токовое реле, и включается непосредственно контактор 9 второй ступени сопротивления динамического торможения (цепи включения катушек контакторов динамического торможения па чертеже не показаны). Если причиной отключения любого токового реле обрыва поля является не обрыв соответствующей цепи возбуждения, а замыканпе зажимов или витков катушки этого реле, то разбаланса моста не происходит, диагональное токовое реле не включается, и динамическое торможение накладывается в две ступени, как и при срабатывании любой из защит, т. е. сначала включается контактор 8 первой ступени, а затем контактор 9 второй ступени динамического то-рможения. Благодаря диагональному токовому реле при возможном обрыве одного из юстировочных сопротивлении 5 и 5 обе цепи полуобмоток возбуждения двигателей остаются под током, а срабатывающее диагональное реле в этом случае только сигнализирует об обрыве сопротивления. В связи с тем, что юстировочные сопротивления составляют незначительную величину, порядка 10% от сопротивления обмоток возбуждения, величины тока и потока возбуждения обоих электродвигателей при обрыве одного из сопротивлений 5 и б изменяются незначительно. Таким образом, предлагаемый электропривод обладает селективкостью действия. Электропривод может быть использован также, когда вместо контакторов и сопротивлений динамического тораможения применяются ионный или тиристорный преобразователи. работающие в инверториом режиме, В этом случае диагональное токовое реле может быть бесконтактным и определять уставку угла зажигания преобразователей, Предмет изобретения 1. Двухдвигательный синхронизированный электропривод, содержащий устройство для динамического торможения входящих в него двигателей постоянного тока, отличающийся тем, что, с целью повышения надежности торможения исключения перенапряжений в элементах передачи, связывающей двигатели, обмотка возбуждения каждого двигателя выполнена двухсекционной при последовательном соединении секций одного и другого двигателей, причем пары секций подключены к источнику постоянного тока через юстировочные сопротивления. 2. Электропривод по ц. 1, отличающийся тем, что для обеспечения селективности и интенсивности динамического торможения при обрыве одной из цепей возбуждения, в диагонаЛь моста, образованного парами секций и юстировочными сопротивлениями, включена обмотка токового реле, контакты которого подключены к устройству динамического торможения.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРИЧЕСКОГО ТОРМОЖЕНИЯ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2268172C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ВСЕСОЮЗНАЯ | 1973 |
|
SU373825A1 |
| УСТРОЙСТВО для ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ | 1969 |
|
SU252389A1 |
| Устройство для пуска асинхронного двигателя | 1960 |
|
SU140856A1 |
| Устройство для торможения двухдвигательного асинхронного электропривода | 1983 |
|
SU1081770A1 |
| Устройство для температурной стабилизации узла токовой отсечки в приводе по системе Г-Д | 1959 |
|
SU133103A1 |
| Двухдвигательный электропривод | 1979 |
|
SU860245A1 |
| Двухдвигательный электропривод | 1980 |
|
SU904163A1 |