Изобретение относится ,к области комллексной автоматизации производственных процессов и может быть, в частности, применено для управления автооператором на автоматических линиях с программным управлением в гальванических цехах.
В настоящее время для автоматизации гальванических процессов применяются многопроцессные агрегатные командоаппараты.
Они сложны и требуют либо смены программы в програм.моносителе, либо усложнения программоносителя для ведения нескольких гальванических процессов. При этом практически невозмол но одновременное ведение большого числа технологических .процессов, связанных как с изменением технологии одного покрытия, так и с осуществлением разных типов гальванопокрытий, использующих общие для всех видов покрытий ванны. В связи с этим поиск свободных ванн ведется по группе ванн одинакового покрытия (например, группа ванн цинкования).
Для увеличения общего числа одновременно обслуживаемых гальванических процессов, независимости выбора процессов от субъективных качеств оператора, а также упрощения кэмандоаппарата поиск свободных ванн необходимо осуществлять как по группе ванн одинакового покрытия, так и по группе ванн, обслуживающих различные технологические
процессы. При этом поиск должен осуществляться во время нахождения автооператора в ванне, которая является общей для всех выбираемых процессов.
Эта цель достигается с .помощью подключеция .к блоку поиска .программ датчиков выбора i процесса, расположенных непосредственно на ванне, откуда ведется разветвление гальванопроцессов, и осуществляющих выбор
соответствующего процесса, а также введения схемы поиска свободных ванн, которая дает разрешение на поиск свободных ванн при наличии запрограммированного поиска в крайнем нижнем положении автооператора.
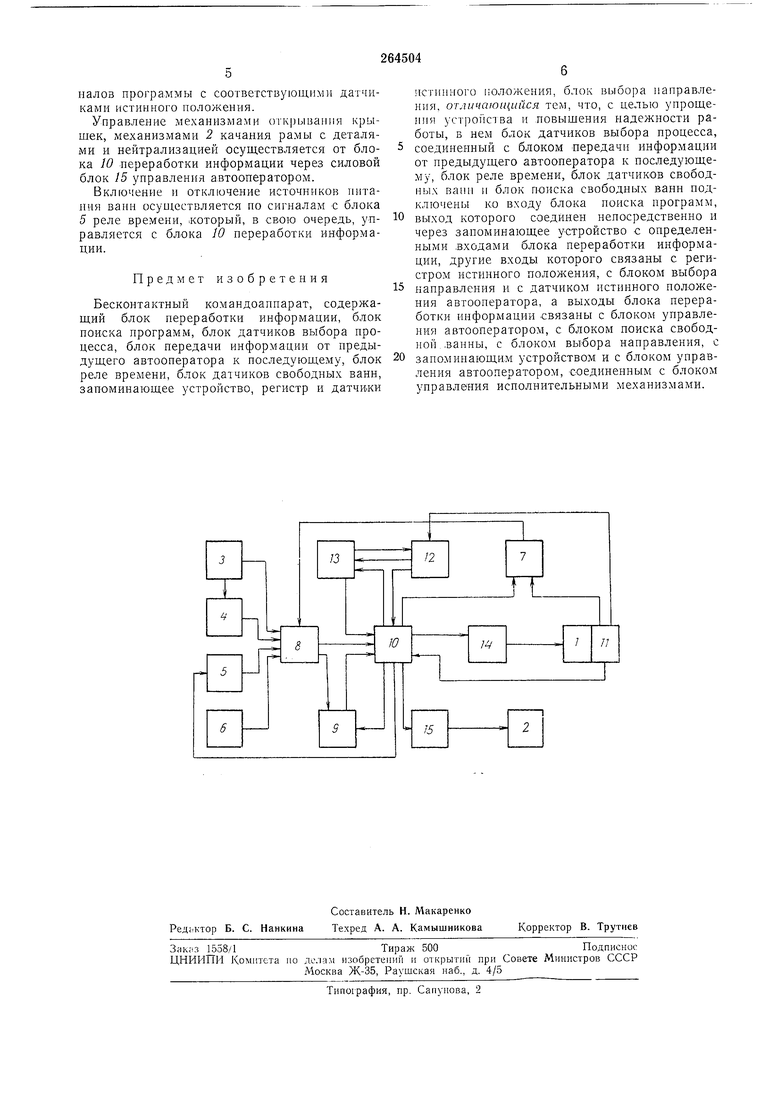
На чертеже изображена блок-схема комаидоаппарата (КА) совместно с исполнительными органами автооператора и вспомогательными механизмами. Бесконтактный КА, управляющий работой
автооператора 1, а также механизмами открывания крышек, механизмами 2 качания рамы с деталями и нейтрализацией, состоит из блока 3 датчиков выбора процесса, соединенного с блоком 4 передачи информации от
предыдущего автооператора к последующему, блока 5 реле времени, блока 6 датчиков свободности Ванн, блока 7 поиска свободных ванн, подключенных ко входу блока 8 поиска программ. Блок поиска программ соединен
щее устройст.во) с блоком 10 переработки информации, обрабатывающим информацию, посту иающую с датчиков // истинного положения автооператора, с регистра 12 истинного положения, блока 13 выбора направления «вперед-назад, и связанным с автооператором 1 через силовой блок 14 управления автооператором, а с механизмами открывания крышек, механизмами качания рамы с деталями и нейтрализацией - через силовой блок 15 управления автооператором механизмами. Кроме того, блок 10 переработки информации связан выходными сигналами с блоком 13 выбора направления «вперед-назад, блоком 5 реле времени, блоком 7 поиска свободных ванн.
Автооператор /, находящийся на любой позиции обслуживаемого им участка в крайнем вер.хнем положении его механизмов с расцепленными захватами, получает через силовой блок 14 управления автооператором от бло.ка 10 переработки информации команды на перемещения и последующий останов его.
Команды на перемещение автооператора 1 при работе его на автоматическом цикле формируются под воздействием сигнала вызова на позицию, где либо окончилась выдержка времени, либо эта позиция является лозицией передачи от предыдущего автооператора к рассматриваемому. Вызов автооператора на загрузочный участок с последующим ходом на линию, а также вызов его на разгрузочный участок с последующим ходом в хранилище рам осуществляется с помощью кнопок, расположенных на выщеупомянутых участках. Сигнал вызова в ванну, где окончилась выдержка времени, появляется при совпадении сигналов с блока 3 датчиков выбора процесса, блока 6 датчиков свободности ванн и сигнала с блока 5 реле времени. Блок датчиков выбора 15роцесса, находящийся непосредственно на ванне и Дающий сигнал при условии нахожден.ия рамы с деталями на этой ванне, выполнен таким образом, что выдает выходной сигна:л только на одном из нескольких выходов, который и является сигналом выбора направления определенного гальванопроцесса. В свою очередь, сигнал с блока 6 датчиков свободности ванны, который находится на ванне, куда будет полол ена впоследствии переносимая рама, дает сигнал лри условии свободности этой ванны, находящейся на выбранном направлении. Для передаточных ванн сигнал вызова автооператора / получается при совпадении сигналов с блока датчиков выбора процесса, расположенного на передаточной ванне, и сигнала свободности последующей ваннь с блока датчиков свободности ванны. Полученные таким образом сигналы вызова управляют работой блока S поиска.программ, который отыскивает вначале свободную программу и подает ее на блок 10 переработки информации.
управляет движением механизмов автооператора, которые последовательно выполняют команды: «вперед-назад, «переключение скорости, «останов, «иоворот влево-вправо, «вниз, доходит до крайнего нижнего положения и по сигналу с датчика нижнего положения, входящего в блок датчиков // истинного положения автооператора, при наличии «поиска с блока 10 отыскивает ирограмму но свободным ваннам.
Поиск свободных Ваин осуществляется с помощью блока 7 лри совпадении сигналов с датчиков .выбора процесса и блока датчиков свободности ванн. Все выщеперечисленные
сигналы вводятся в блок 8 поиска программ, который находит программу по свободным ваннам и производит запись ее в запоминающее устройство 9. По окончании поиска механизмы автооператора / осуществляют лодъем захваченной рамы с деталями. В этом положении автоолератора происходит смена программ в блоке 10, лри этом возможно либо воспроизведение произвольных жестко заданных арограм.м, связанных с переездом на
позицию с последующим многократным окунанием в ванну, либо воспроизведение программ по найденной свободной позиции.
В первом случае автооператор соверщает движения но пр.оизвольным программам, по
окончании которых сигналом с блока 10 выбирается из запоминающего устройства 9 программа по свободным ваннам, которая заканчивается закладкой рамы с деталями в выбранную свободную ванну и возвратом
автооиератора / в крайнее верхнее положение. Для управления направлением движения автооператора «вперед-назад по сигналу вызова, останова его на определенной иозиции служит блок 13 выбора направления впередназад и регистр 12 истинного положения. Блок выбора направления «вперед-назад сравнивает истинное положение автооператора, определяемое сигналом обратной связи по перемещению и даваемое регистром 12 истинкого положения, с сигналом додаваемой подпрограммы с блока 10 и определяет необходимое направление движения либо вперед, либо назад. Сигнал с выхода блока 13 выбора направления «вперед-назад лодается затем в блок 10 и для управления схемой реверса регистра 12 истинного положения, который производит счет в найденном направлении до тех пор, пока не прекратится движение автооператора
I, а это возможно при совпадении программы с сигпалами обратной связи по перемещению, даваемыми регистром истинного положения. В этом случае происходит точный останов автооператора 1 по сигналу с датчиков 11
истинного положения автооператора. После точного останова автооиератора на определенной ванне механизмы его соверщают движения «налево-направо, «.вниз, «вверх с захватом или без захвата, а останов каждого
налов программы с соответствующими датчиками истинного положения.
Управление механизмами открываиия крышек, механизмами 2 качания рамы с деталями и нейтрализацие осуществляется от блока 10 переработки информации через силовой блок 15 управления автооператором.
Включение и отключение источников питания ванн осун1,ествляется по сигналам с блока 5 реле времени, 1который, в свою очередь, управляется с блока 10 переработки информации.
Предмет изобретения
Бесконтактный командоаппарат, содержащий блок переработки информации, блок поиска программ, блок датчиков выбора процесса, блок передачи информации от предыдущего автооператора к последующему, блок реле времени, блок датчиков свободных ванн, запоминающее устройство, регистр и датчики
истипного 1юло/кения, блок выбора направления, отличающийся тем, что, с целью упрощения устройства и повыщения надежности работы, в нем блок датчиков выбора процесса, соединенный с блоком передачи информации от предыдущего автооператора к последующему, блок реле времени, блок датчиков свободных вапп и блок поиска свободных ванн подключены ко входу блока поиска программ,
выход которого соединен непосредственно и через запоминающее устройство с определенными .входами блока переработки информации, другие входы которого связаны с регистром истинного положения, с блоком выбора
направления и с датчиком истинного положения автооператора, а выходы блока переработки информации связаны с блоком управления автооператором, с блоком поиска свободной ,ванны, с блоком выбора направления, с
запоминающим устройством и с блоком управления автооператором, соединенным с блоком управления исполнительными механизмами.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДОАППАРАТ ДЛЯ УПРАВЛЕНИЯ АВТООПЕРАТОРОМ НА ГАЛЬВАНИЧЕСКОЙ ЛИНИИ | 1973 |
|
SU407978A1 |
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМИЛИНИЯМИ | 1972 |
|
SU336648A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ УСТРОЙСТВОМ | 1971 |
|
SU312241A1 |
| Устройство для автоматического управления объектом | 1982 |
|
SU1084741A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТООПЕРАТОРАМИ АВТОМАТИЧЕСКИХ ЛИНИЙ ГАЛЬВАНОПОКРЫТИЙ | 1973 |
|
SU387041A1 |
| Устройство для управления автооператором полуавтоматических линий гальванопокрытий | 1977 |
|
SU708001A1 |
| ПТБ | 1973 |
|
SU406962A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
