Изобретение относится к подъемно-транспортным средствам, а именно к устройствам для иерекладки изделий с одного конвейера на другой (преимущественно шагающих).
Известны устройства для перекладки изделий с одного конвейера на другой, представляющие собой рычажные системы (так называемые механические руки) с приводом и захватами на концах, которые смонтированы на поворотных осях, связанных с валом, несущим рычаги, цепной передачей, обеспечивающей горизонтальное положение захвата при любом угле наклона рычагов. В таких устройствах Изделие во время перекладки не поворачивается.
Пель изобретения - обеспечить перекладку изделий с одного конвейера на другой с одновременным новоротом в ПЛОСКОСТИ нерекладки по наиболее выгодной траектории перемещения изделия.
Это достигается тем, что рычажная си-стема выполнена в виде водила, новОротного относительно оси неподвижной звездочки, установленной на Ооновании и связанной цепью с планетарной Звездочкой, жестко скрепленной с несущим рычагО;М, являющимся, в свою очередь, водилом другой планетарной звездочки, жестко соединенной с механизмом захвата и связанной цепью со звездочкой, неподвижно сидящей на оси поворота несущего рычага.
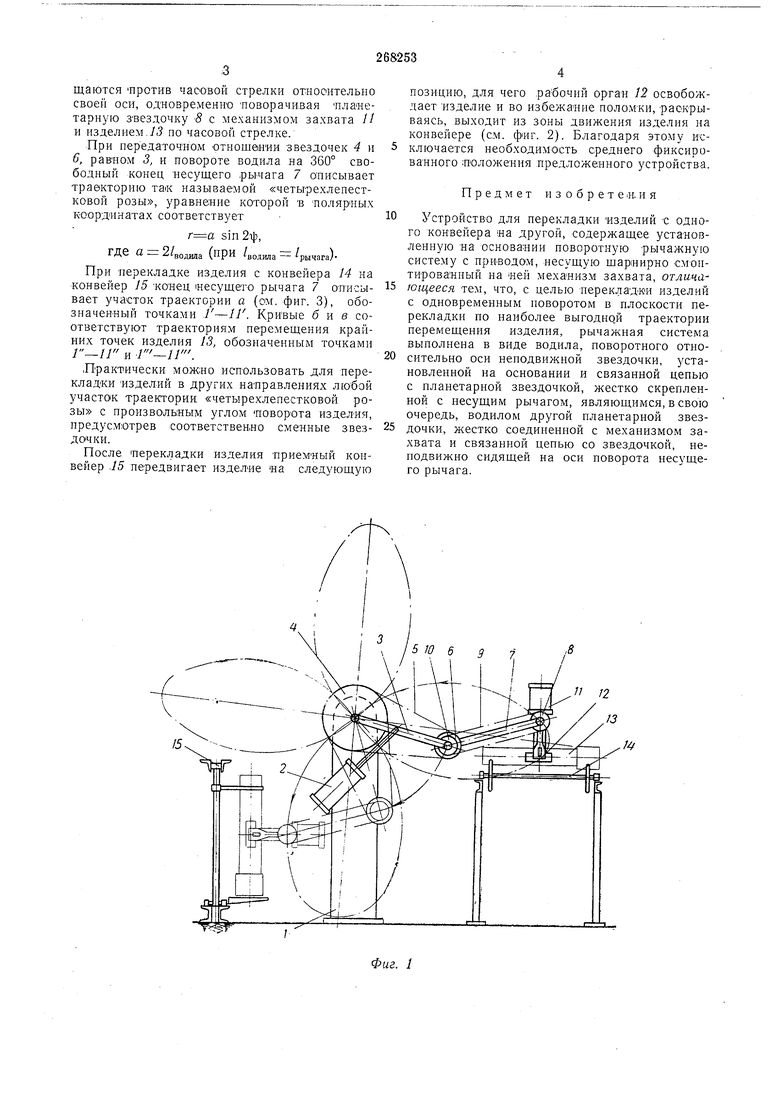
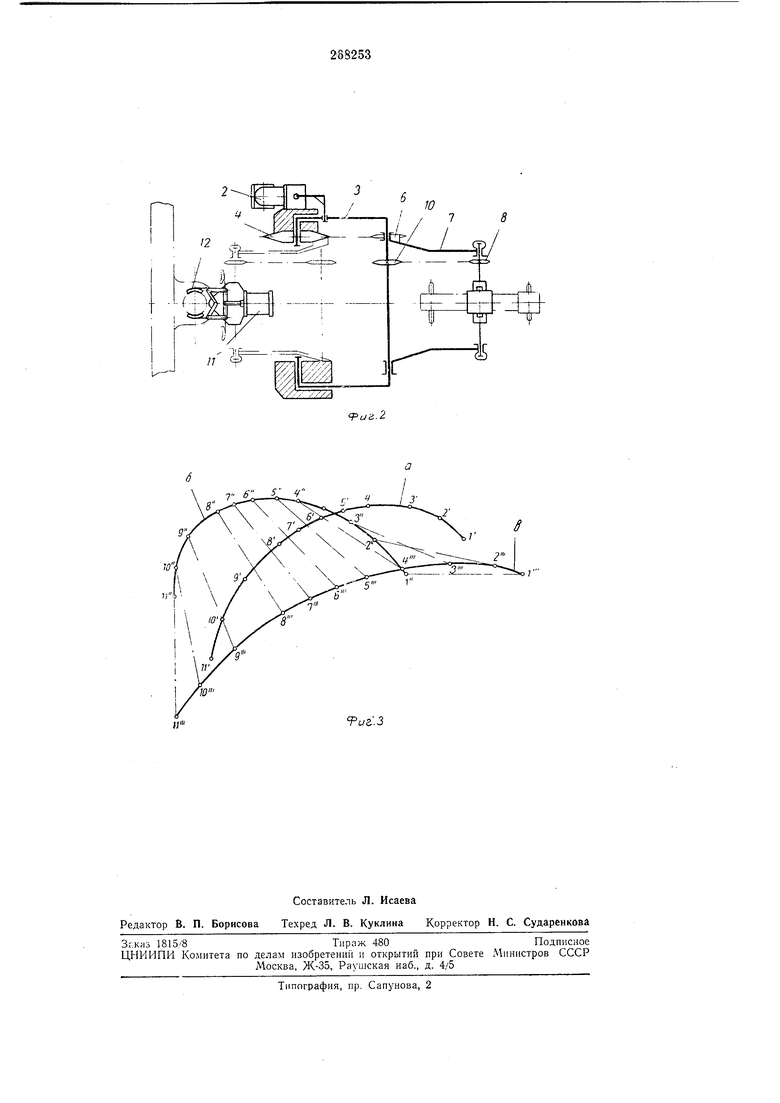
На фиг. 1 изображено предложенное устройство, общий вид; на фиг. 2 - кинематическая схема устройства, вид в нлане; на фиг. 3 - траектории элементов рычажной
системы.
Устройство содержит основание / и нневмоцилиндр 2, щарнирно связанный с водилом 3, поворачивающимся относительно оси неподвижной звездочки 4, жестко закрепленной на
основа-НИИ и связанной цепью 5 с планетарной звездочкой 6, которая свободно сидит «а оои водила. К звездочке 6 жестко прикреплен несущий рычаг 7, который, в свою очередь, ячляется водилом другой планетарной звездочки 8, связанной цепью 9 со звездочкой 10, неподвижно сидящей на оси поворота несущего рычага. Механизм захвата 11 с рабочим органом }2 жестко связан с планетарной звездочкой 8.
Изделие 13 передается с шагающего вертикального замкнутого цепного конвейера 14 на шагающий напольный горизонтально замкнутый конвейер 15. ПринЦИП действия описываемого устройства
основан на использовании рычажио-планетарного механизма с гибким звеном. Устройство .работает следующим образом. При повороте водила 3 под действием штока пневмоцилиндра 2 по часовой стрелке звезщаются против часовой стрелки относительно своей оси, одновременно поворачивая планетарную Звездочку 5 с механизмом захвата И и изделием.УсЗ по часовой стрелке.
При передаточном отиошаиии звездочек 4 и 6, равном 3, и повороте водила на 360° свободный конец несущего рычага 7 о-писывает траекторию так называемой «четырехленестковой розы, уравнение которой в поляр ных координатах соответствует
sin 2il5,
ГД6 G - водила (.при водила - рычагаЛ
При перекладке изделия с конвейера 14 на конвейер 15 конец несущего рычага 7 описывает участок траектории а {ом. фиг. 3), обозначенный точками 1-11. Кривые б и в соответствуюТ траекториям перемещения крайних точек изделия 13, обозначенным точками и .
.Практически мож;но использовать для перекладки изделий в других иаправлеииях любой участок траектории «четырехлепестковой розы с произвольным углом поворота изделИЯ, предусмотрев соответственно сменные звезДОЧКИ.
После перекладки изделия приемный конвейер .15 передвигает изделие на следующую
позицию, для чего рабочий орган 12 освобождает изделие и во избежа-ние поломки, раскрываясь, выходит из зоны движения изделия на конвейере (см. фнг. 2). Благодаря этому исключается необходимость среднего фиксированного положения предложенного устройства.
Предмет и з о б р е т е -н. и я
Устройство для перекладки изделий с одного конвейера иа другой, содержащее установленную иа основании поворотную рычажиую систему с приводом, несущую щариирно смонтированный на ней механизм захвата, отличиющееся тем, что, с целью нереклаДКИ изделий с одновременным поворотом в плоскости перекладки по наиболее выгодной траектории перемещения изделия, рычажная система выполнена в виде водила, поворотного относительно оси неиодвижиой звездочки, уетаиовлениой на основании и связанной цепью с планетарной звездочкой, жестко скрепленной с несущим рычагом, являющимся, в свою очередь, водилом другой планетарной звездочки, жестко соединенной с механизмом захвата и связанной цепью со звездочкой, неподвижно сидящей на оси поворота несущего рычага.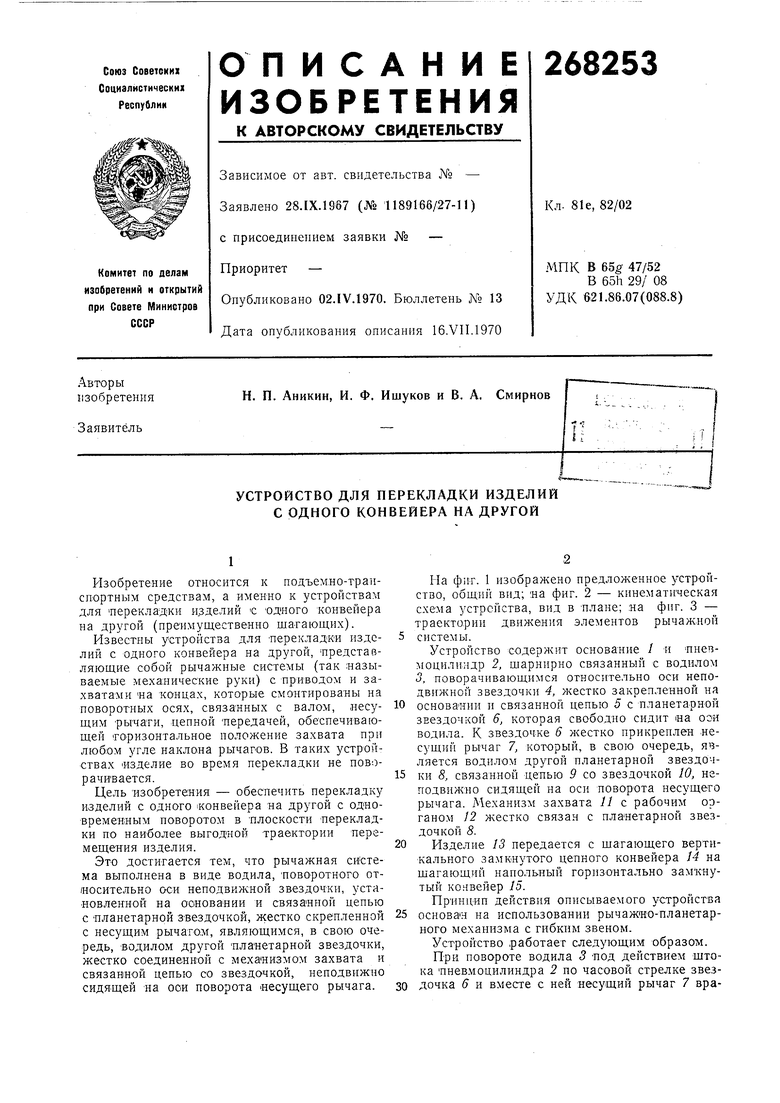
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перекладки изделий с одного конвейера на другой | 1980 |
|
SU962143A1 |
| ЗАГРУЗЧИК СТЕКЛОИЗДЕЛИЙ | 1971 |
|
SU301314A1 |
| Устройство для захвата и передачи штучных грузов с конвейера на конвейер | 1977 |
|
SU663644A1 |
| Устройство для групповой клепки развальцовкой | 1986 |
|
SU1375399A1 |
| Захватное устройство для транспортирования цилиндрических грузов | 1972 |
|
SU439460A1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Устройство для перекладки длинномерных изделий с одного конвейера на другой | 1982 |
|
SU1082732A1 |
| Кресло-коляска для инвалидов | 1988 |
|
SU1630822A1 |
| Устройство для полирования изделий | 1978 |
|
SU804401A1 |
| Стенд для исследования механизма копирования криволинейного контура деталей мебели при шлифовании | 1985 |
|
SU1292997A1 |
.З
