Изобретение относится к области кузнечного производства.
Известны ковочные манипуляторы, содержащие самоходную рельсовую тележку с рамой, имеющей хоботовую головку с клещами для захвата заготовки поперек оси, снабженную гидроприводом. Однако такие манипуляторы не могут поворачивать заготовку вокруг двух взамно перпендикулярных осей и вращать вокруг вертикальной оси.
Предлагаемый манипулятор обеспечивает все необходимые технологические манипуляции с заготовкой, не имеющей клещевины, во время ее свободной ковки на прессах или молотах. Это достигается тем, что он снабжен дополнительной хоботовой головкой с клещами, расположенной под углом к первой в плоскости перемещения тележки. При этом клещи одной из головок имеют губки для захвата заготовки вдоль оси, а каждая из головок подвешена к раме телел ки посредством системы рычагов с возможностью перемещения вдоль оси подачи заготовки и поворота в плоскости перемещения тележки по соответствующим пазам, выполненным в установленной на раме плите, и снабжена- двухкривошипным механизмом, связанным с гидроприводом тележки и обеспечивающим упомянутые перемещения и ловорот головок.
Кроме манипулирования с заготовкой, механизм должен обеспечивать подачу и наложение инструментов, необходимых- -по ходу процесса ковкп.
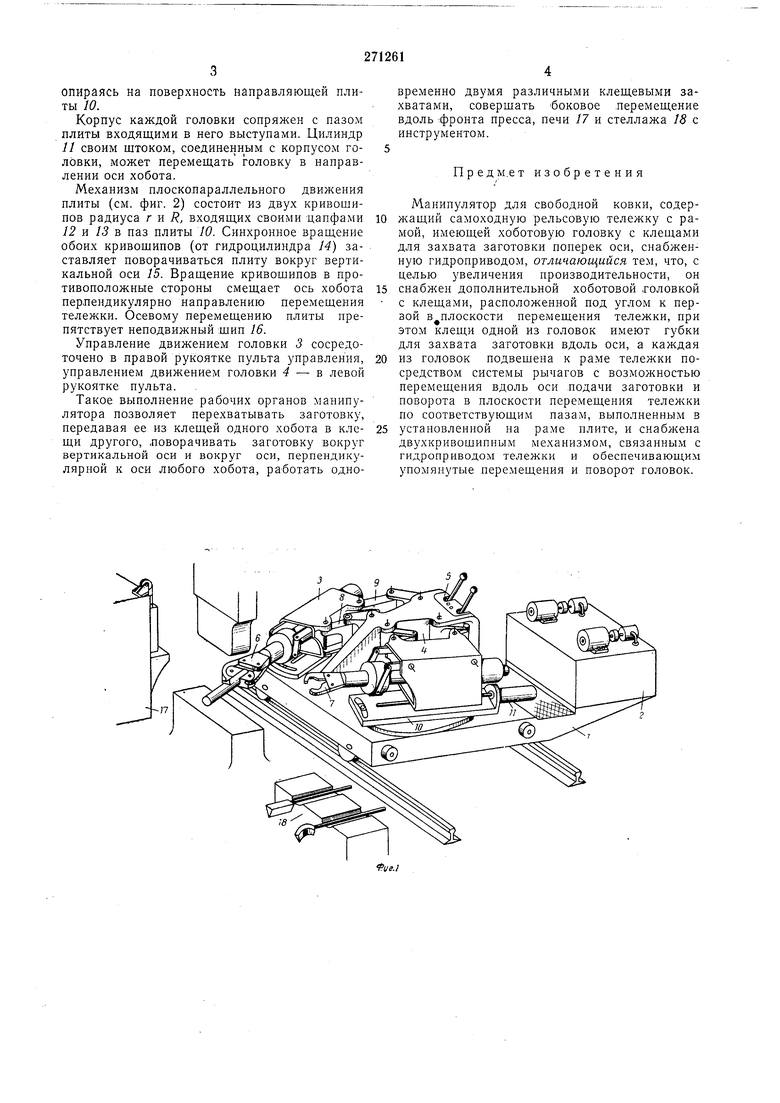
На фиг. 1 изображен описываемый манипулятор в общем виде; на фиг. 2 - устройство приводов перемещения головки с хоботом и ее подвеска.
Манипулятор состоит из самоходной тележки У с блоком приводов 2 бокового перемещения тележки и всех остальных технологических движений, двух хоботовых головок 3 и 4 и пульта 5 управления.
Головка 3 имеет хобот, снабженный клещами 6 для осевого захвата заготовки, а головка 4 снабл ена клещами 7 для поперечного захвата цилиндрических заготовок пли шайб и дисков за торцы.
Оба хобота в горизонтальной плоскости мо гут располагаться под изменяемым углом друг к другу (примерно 45-90°) и имеют самостоятельные средства для перемещения в вертикальной плоскости. Хоботы имеют одимаковые устройства для привода зажима вертикального перемещения, наклона и вращения вокруг собственной оси.
опираясь на поверхность направляющей плиты 10.
Корпус каждой головки сопряжен с пазом плиты входящими в него выступами. Цилиндр // своим щтоком, соединеннь1м с корпусом голОвки, может перемещать головку в направлении оси хобота.
Механизм плоскопараллельного движения плиты (см. фиг. 2) состоит из двух кривошипов радиуса г vi R, входящих своими цапфами 12 к 13 ъ паз плиты 10. Синхронное вращение обоих кривощипов (от гидроцилиндра 14} заставляет поворачиваться плиту вокруг вертикальной оси 15. Вращение кривошипов в противоположные стороны смещает ось хобота перпендикулярно направлению перемещения тележки. Осевому перемещению плиты препятствует неподвижный шип 16.
Управление движением головки 3 сосредоточено в правой рукоятке пульта управления, управлением движением головки 4 - в левой рукоятке пульта.
Такое выполнение рабочих органов манипулятора позволяет перехватывать заготовку, передавая ее из клещей одного хобота в клещи другого, .поворачивать заготовку вокруг вертикальной оси и вокруг оси, перпендикулярной к оси любого хобота, работать одновременно двумя различными клещевыми захватами, совершать боковое .перемещение вдоль фронта пресса, печи 17 и стеллажа 18 с инструментом.
Предм.ет изобретения
Манипулятор для свободной ковки, содержащий самоходную рельсовую тележку с рамой, имеющей хоботовую головку с клещами для захвата заготовки поперек оси, снабженную гидроприводом, отличающийся тем, что, с целью увеличения производительности, он
снабжен дополнительной хоботовой головкой с клещами, расположенной под углом к первой в плоскости перемещения тележки, при этом клещи одной из головок имеют губки для захвата заготовки вдоль оси, а каждая
из головок подвешена к раме тележки посредством системы рычагов с возможностью перемещения вдоль оси подачи заготовки и поворота в плоскости перемещения тележки по соответствующим пазам, выполненным в
установленной на раме плите, и снабжена двухкривошипным механизмом, связанным с гидроприводом тележки и обеспечивающим упомянутые перемещения и поворот головок.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный агрегат | 1980 |
|
SU889483A1 |
| Кузнечный манипулятор | 1955 |
|
SU114651A1 |
| Клещевая головка ковочного манипулятора | 1987 |
|
SU1449229A1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| РУКА МЕХАНИЧЕСКАЯВ П Т БЙП .-':••-V. ^-;:^ Н о .-•' , -•-й(ц, -.••'..•,;:,.; | 1972 |
|
SU425714A1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Ковочный напольный манипулятор | 1974 |
|
SU493087A1 |

