Изобретение относится к вспомогательному оборудованию кузнечноштампсвочного производства.
Известен ковочный напольньй манипулятор, содержащий установленный на тележке механизм подъема и выравнивания хобота, соединенный с последним через ось передней и задней подвесок. Однако данньй манипулятор не имеет упругих боковых и продольных перемещений хобота, что затрудняет его эксплуатацию при ковке на молотах. ...
Предлагаемый манипулятор снабжен амортизаторами, соединенными шарнирно одним концом с тележкой, а другим - с осью задней подвески хобот.а и вьшолненными в виде тя соединенных с тележкой, резьбовые .концы котррьпс с. размещенными на них пружинами сжатия смонтированы в корпусах, закрепленных с помощью серег на оси задней подвески.
Это позволяет обеспечить упругие боковые и лродольные перемещения хобота..
На фиг. 1 показан манипулятор, общий вид; нафиг. 2 - разрез по .А-А на фиг. 1.
Манипулятор состоит из тележки 1, установленной на колесах 2..Через амортизированные тяги 3 хобот 4 щарнирно соединен с рычагами 5 подъема хобота. Задняя ось 6, жестко закрепленная на хоботе амортизированными тягами 7, также ваарнирно соединяется с рычагами выравнивания хобота 8, а через амортизаторы 9, состоящие из серьги 10, пальца 11,вилки 12, корпуса 13, тяги 14, пружины сжатия 15, опорных шайб 16 и 17 и сферического подшипника 18, установленного на оси 19, соединена с кронштейном 20,-установленным на тележке. Амортизаторы устанавливаются на обоих консольных концах оси задней подвески. С торцов оси расточены отверстия, в которые вставлены пяты 21 со сферической головкой и пружинные элементы 22, которыми пяты постоянно под-;
o жимаются к плите 23 тележки. Рычаги 5 и 8 установлены в кронштейнах тележки и соединены с цилиндрами 24 и 25.
Манипулятор работает следующим образом.
5 При повороте рычагов 5 и Вподдействием цилиндррв происходит переустановка хобота в вертикальной цлоскости. При этом амортизаторы повора. чиваются в сферических подшипниках.
0 При приложении нагрузки в направлении Б или В хобот отклоняется на тягах 3 и 7 от среднего положения и через серьги, пальцы,вилки,корпуса и опорные шайбы сжимают пружины. По5 еле снятия нагрузки хобот под дей, ствием усилий пружин возвращается в исходное .положение.
При приложении нагрузки к клещам хобота в направлении Г или Д хобот
0 вместе с осью задней подвески и подпружиненными пятами упруго поворачивается между ограничительньми плитами тележки, сжимая пружины амортизаторов. Цосле снятия нагрузки хобот
, возвращается усилием пружин в ис:5одное положение. Таким образом, обеспечивается переустановка хобота в вертикальной плоскости,- амортизация в продольном направлении (Б или
д В) и упругое боковое перемещение в горизонтальной плоскости.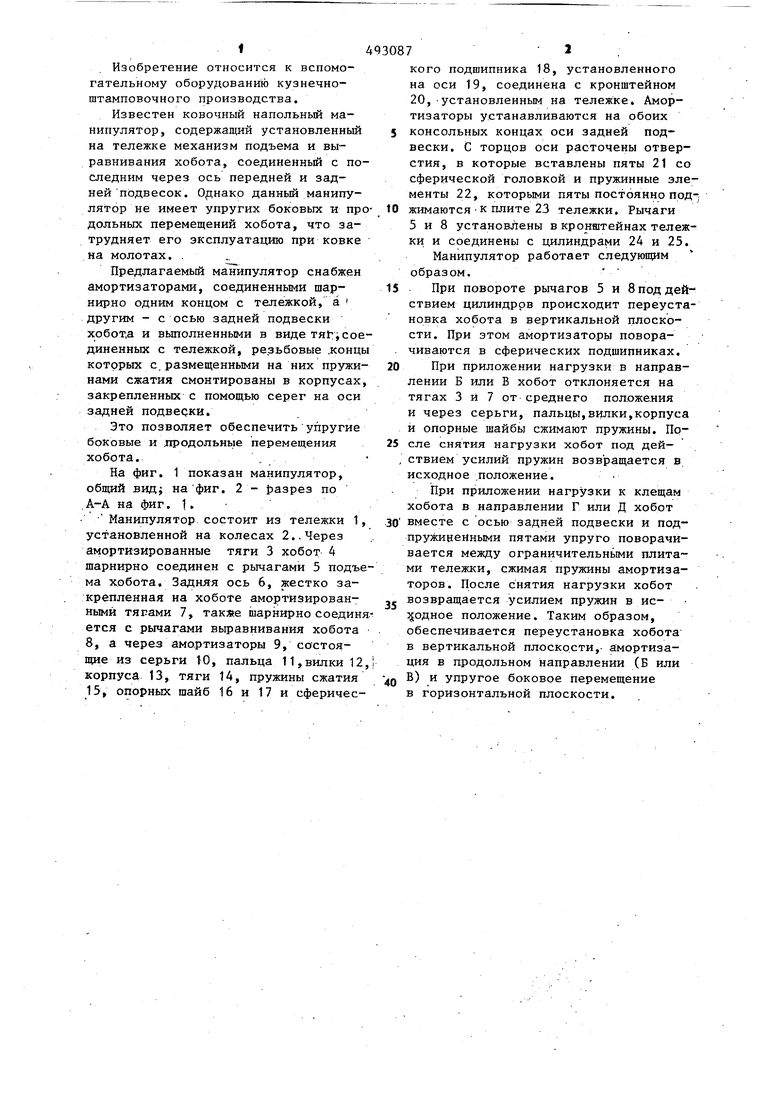
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР | 1973 |
|
SU407622A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1969 |
|
SU236207A1 |
| в ПТБФОеД eHGIEF'i | 1973 |
|
SU408702A1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
| Ковочный манипулятор | 1980 |
|
SU893385A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Подвесной ковочный манипулятор | 1979 |
|
SU977095A1 |
| Ковочный безрельсовый манипуля-TOP | 1978 |
|
SU795707A1 |

КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР, содержащий установленньй на тележке механизм подъема и выравнивания хобота, соединенньй с последним через оси передней и задней подвесок, отличающий— с я тем, что, с целью обеспечения упругих боковых и продольных перемещений хобота, он снабжен амортизаторами, соединенными шарнирно одним концом с тележкой, а другим - с осью задней подвески хобота и выполненным в виде тяг, соединенных с тележкой, резьбовые концы которых с размещенными на них пружинами сжатия смонтированы в корпусах,закрепленных с помощью серег на оси задней подвески.(rtа4^ СОоо о00^SfV / /• I А "^'7' J2 ff 23 /87<ЙЙК/>&