(54) ПОДВЕСНОЙ КОВОЧНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвесной ковочный манипулятор | 1978 |
|
SU706176A1 |
| КОВОЧНЫЙ НАПОЛЬНЫЙ МАНИПУЛЯТОР | 1973 |
|
SU407622A1 |
| в ПТБФОеД eHGIEF'i | 1973 |
|
SU408702A1 |
| Ковочный манипулятор | 1975 |
|
SU564080A1 |
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Ковочный манипулятор | 1991 |
|
SU1766569A1 |
| Передняя подвеска хобота ковочногоМАНипуляТОРА | 1979 |
|
SU816656A1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
1
Изобретение относится к вспомогательному оборудованию кузнечно-прессовых цехов, а именно к конструкциям ковочных манипуляторов.
Известен подвесной ковочный манипулятор, содержащий связанную с подвижной 5 тележкой, размещенной на подвесных рельсах поворотную колонну, хобот с клещевым захватом, связанный с колонной посредством передних и задних тяг и механизма разгрузки от опрокидывающего момента, а также Q механизм вертикального перемещения хобота 1.
Недостатком известной конструкции подвесного- ковочного манипулятора является сложность механизма разгрузки от опрокидывающего момента, выполненного в виде 15 рычажной системы, имеющей большое количество сочленений, шарниров и опор, что приводит к снижению надежности работы манипулятора в целом.
Цель изобретения - упрощение конструкции и повышение надежности работы манипулятора.
С этой целью в подвесном ковочном манипуляторе, содержащем связанную с подвижной тележкой, размещенной на подвесных рельсах, поворотную колонну, хобот с клещевым захватом, связанный с колонной посредством передних и задних тяг и механизма разгрузки от опрокидывающего момента, а также механизм вертикального перемещения хобота, механизм разгрузки от опрокидывающего момента выполнен в виде вертикально смонтированных на колонне двух равновеликих силовых цилиндров, штоки которых направлены в разные стороны и шарнирно связаны с передними и задними тягами, при этом одноименные полости силовых цилиндров соединены между собой магистралями и связаны с источником питания, а между силовыми цилиндрами и источником питания встроен трехпозиционный распределитель, которым снабжен манипулятор.
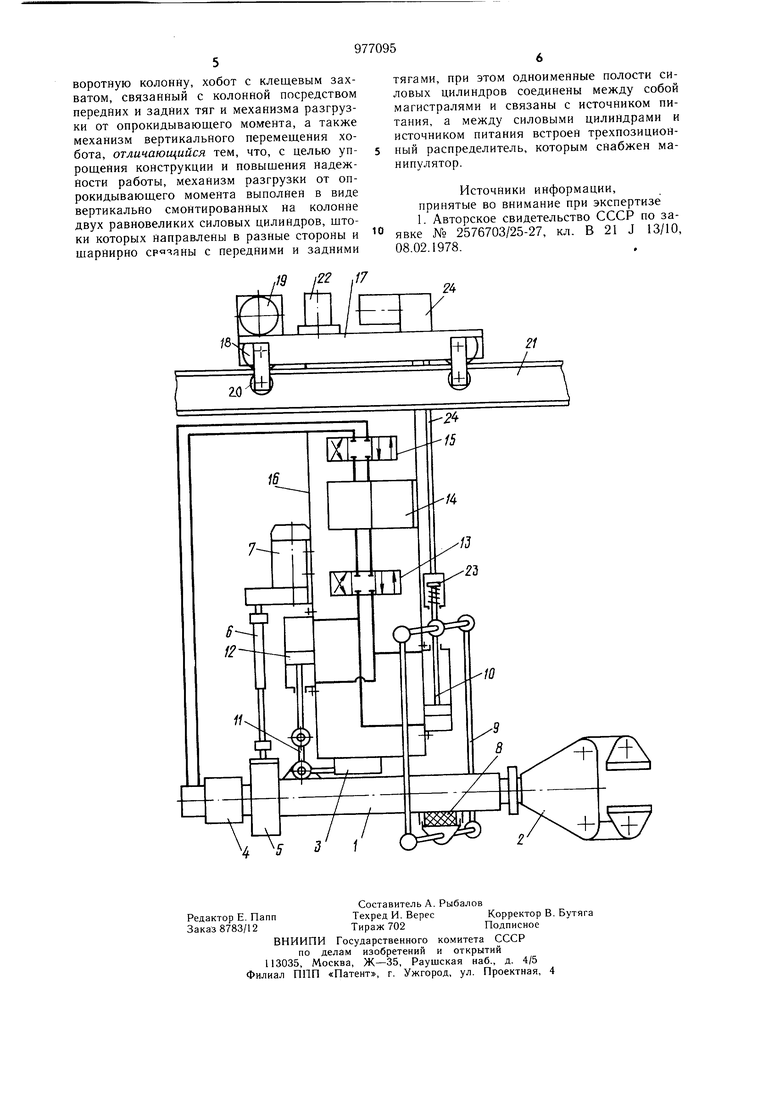
На чертеже изображена конструкция манипулятора.
Подвесной ковочный манипулятор содержит хобот 1 с клещами 2, осевой амортизатор 3, механизм 4 зажима, редуктор 5 поворота клещец с муфтой 6, и приводом 7 поворота клещей. Передняя опора хобота посредством общего амортизатора 8 и тяг 9 соединена с передним силовым гидроцилиндром 10, а задняя опора тягами 11 соединена со встречно-развернутым относительно переднего гидроцилиндра задним силовым гидроцилиндром 12. Одноименные полости цилиндровые и штоковые переднего и заднего силовых гидроцилиндров соединены магистралями и связаны трехпозиционным распределителем 13 с гидросистемой и дистанционной системой 14 управления. Механизм зажима клещей посредством распределителя 15 связан также с гидросистемой и дистанционной системой 4 управления. Названные устройства размещены на колонне 16 с подвижной тележкой 17, которая опирается ходовыми колесами 18 с приводом 19 передвижения и фиксируется от опрокидывающего момента опорными катками 20 на подвесные рельсы 21. На подвижной тележке размещен механизм 22 поворота колонны. Передний силовой гпдроцилиндр подсоединен через грузовой амортизатор 23 к механизму 24 подъема хобота, размещенному на колонне с ходовой тележкой.
Работа подвесного ковочного манипулятора осуществляется следующим образом.
В заданное исходное положение манипулятор перемещается при включении системы 14 управления с помощью механизма 19 передвижения на подвижной тележке 17 по подвесным рельсам 21. Разворот колонны 16 относительно подвижной тележки 17 производится механиз.мом 22 поворота. Включением механизма 24 подъема хобота производится параллельное опускание или подъем хобота. Жидкость из рабочих полостей переднего силового гидроцилиндра 10 по магистралям свободно перемещается в одноименные полости заднего силового гидроцилиндра 12. Так как площади одноименных полостей переднего и заднего силовых гидроцилиндров 10 и 12 одинаковы, то и общий обем перекачиваемой жидкости в одноименных полостях остается постоянным и давление в них уравновешивается. При этом хобот сохраняет свое первоначальное Наклонное или горизонтальное положение, которое он занимал в момент включения механизма 24 подъема на подъем или опускание хобота 1. Наклон хобота вверх или вниз осуществляется при включении распределителя 13. При этом, когда жидкость нагнетается в цилиндровые полости и сливается из штоковых полостей силовых цилиндров 10 и 12, хобот наклоняется вверх, а если наоборот, то хобот отклоняется вниз. После установки хобота в требуемое положение при включении распределителем 17 механизма 4 зажима клещами 2 захватывается заготовка, лежащая на полу или приемном столике. При включении в обратном порядке механизмов 13, 10 и 12 подъема хобота наклона клещей производится горизонтальное выравнивание оси
хобота с заготовкой и установка их в требуемое положение по высоте. Далее механизмом поворота клещей, состоящим из редуктора 5, муфты 6 и привода 7, устанавливается угловое положение клещей 2 с зажатой заготовкой. После этого заготовка с помощью механизма 19 передвижения подается на боек ковочного агрегата.
При ковке динамические нагрузки от ударов бойков по заготовке передаются хоботу 1 манипулятора. Нагрузки воспринимаются частично передним общим амортизатором 8 (для прессовых манипуляторов может не устанавливаться), а частично грузовым амортизатором 23. Наибольшая нагрузка возникает на передней опоре хобота. Она посредством тяг 9 передается переднему силовому цилиндру 10 и через грузовой амортизатор 23 механизму 24 подъема. При этом составляющая от опрокидывающая сил веса хобота с заготовкой - грузовым амортизатором 23 и механизмом 24 подъема. На
задней опоре хобота возникает реакция от составляющей опрокидывающего момента, которая передается посредством тяг 11 заднему силовому гидроцилиндру 12. Поскольку цилиндровые полости переднего и заднего силовых гидроцилиндров 10 и 12 находятся под одной нагрузкой, равной составляющей от опрокидывающего момента, то и избыточное давление в них будет равным и одного знака. Таким образом, составляющая от опрокидывающего момента уравновещи- вается. При деформации грузового амортизатора 23 происходит опускание штока переднего силового цилиндра 10 и жидкость перетекает по магистралям из одноименных полостей силовых цилиндров 10 и 12. В этом случае магистрали являются демпфе5 рами и перетекание жидкости де.мпфирует колебания хобота и они быстро затухают. Осевые перемещения хобота 1 при ударах ковочного агрегата и наезде клещами на преграду воспринимаются осевым амортизатором 3, который возвращает хобот в исходное нейтральное положение после снятия нагрузки.
При больщом опрокидывающем моменте, действующем со стороны заготовки на манипулятор при ковке, одно из ходовых колес 18 может разгружаться, но нагрузка будет восприниматься опорными катками 20, которые попарно с ходовыми колесами 18 создают замкнутую систему относительно подвесных рельсов 21.
Предлагаемый манипулятор обладает 0 простой конструкцией и высокой надежностью в работе.
Формула изобретения
Подвесной ковочный манипулятор, содержащий связанную с подвижной тележкой, размещенной на подвесных рельсах, по
