Изобретение относит1 я к об.1асти автоматичеекого регулироваиия.
Известии следяни.е clieтe ы, содержащие датчик, еииусиочшсииусиый траие4юрматор, фазовьи детектор, схему для подавления квааратурио .чи. усилители и иеиолиите. двигатель. В этих схемах уиравляющий вхот схемв для подавления квадрат -риоГ1 иомехи иодклюмеи к висшием источиику оиорного иаиряженпя. Однако технологический разброс параметров синусно-к()С11иуси;)1х трапсфор.ма.торов, ii3Meneiiiic темиературы окружающей среды, частоты и формы иитающего иаиряжеипя приводят к иоявлеипк) фазовых сдвигов сигнала, что сии/ ает точиость следяи1е1 1 системы.
Примеиеиие г)азосдвига1оипг устройств д:1я компенсаипи этих сдвигов не дает должного эффекта, усло/; пяст и связаио с исоб-ход мостыо сложной иидивидуалыюй настройки каждой следяидей системы.
В иредлагаемой следящей еистеме управляющий вход схем1 1 для иодавлеиия квадратурной помехи подключен к косппусиой обмотке ротора сииусио-коспиусиого траисфо матора. Угол отсечки с1Пиала ввбирается IK; меиее максим.ыьпо-допустпмого фазового сдвига си111а.та OTiiocirrc.ihHO оиориого 1 аиряжения (})азоиого детектора. Э го позволяет иовысит1 TOMHocTij следяи1ей системы.
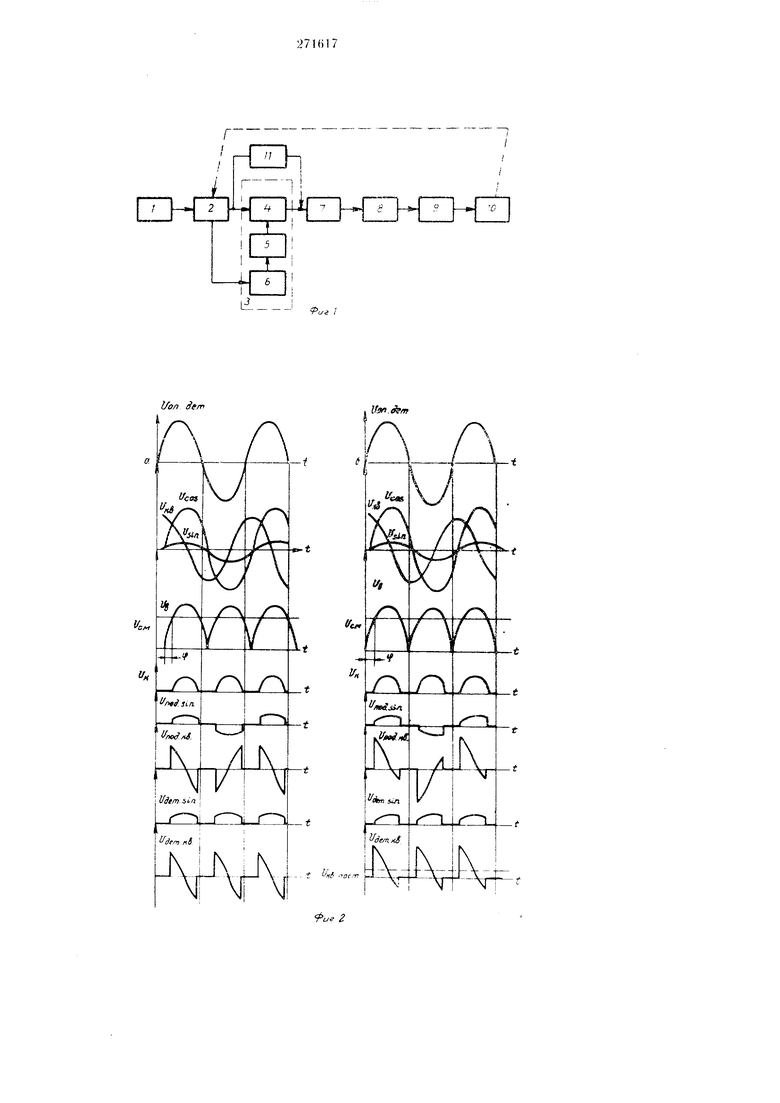
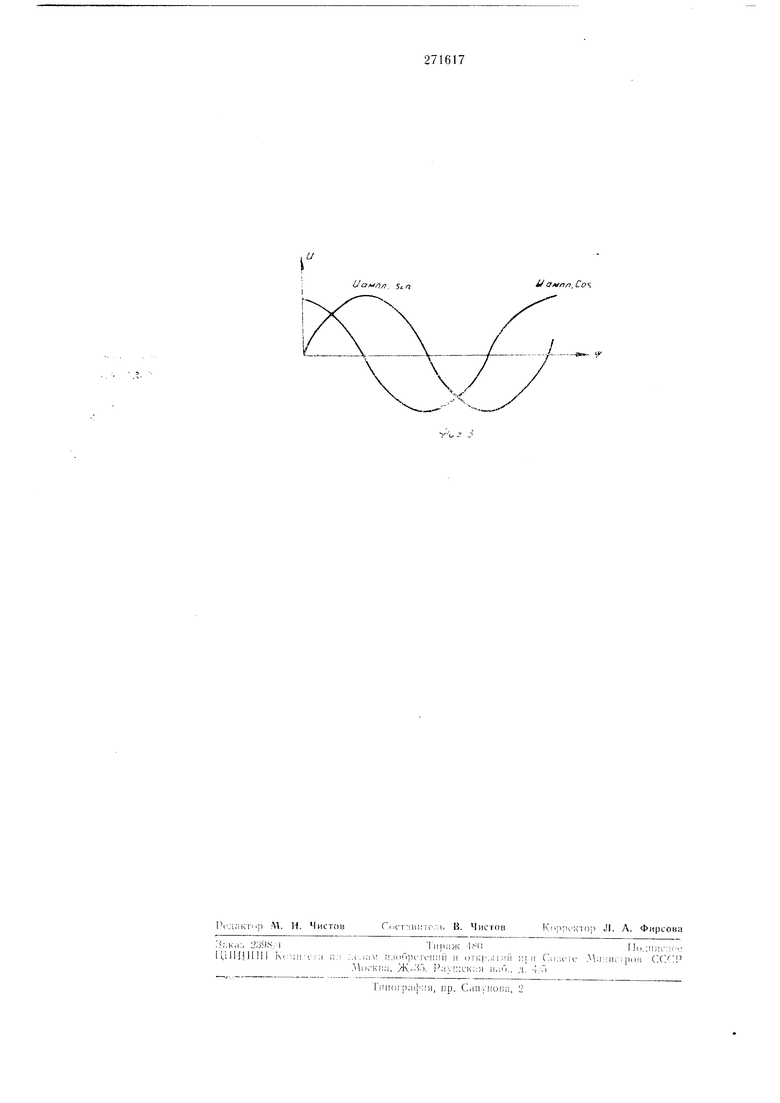
На фи1. i изобра/1 еиа С raeMoii следящей системы; иа (. 2 - ди 1раммы {а п б), поясиякидис p;i6( системы; на фиг. 3 изобра/1чеи 1 з;:висил;()стп сигпата на сппуспой -. п; иряжеиия ii;i косии спой обмотках ротора сии L ио-к(Нинусиого транс4орл;;1.тора от угла рассогласовап:;-;.
Блок-схема состоит из датчика /. яв.тяюии гоея иреобразопат елем i:niepMeMoii 1к 1ичп|ил в эле трическ1И сигиа,, син сио-кс)син сио1о трансформатора -. 1хслч 1 Я ;1ля иода1 /:еип/; квадратурпоп no;iicxi, ссстояинм из к/поча Л источпика cMCiiiaknneio и;111р5;;1 е1Ия J и Д1 у иолхпериодиого BiiiiipHMnre.ui i. силите.1я исремеппого Г, ({шз.мюго дегектс ра d усп.iirre.iH лчмипости 9. исп(),п,иого мех:1 1изма 1(1. отраба : biBauHiiei о спо-коспложение, и О1р,аиич1:теля ;п:пл1гг ды сиг
ио мп1П1муму //.
Па диаг|)аммах (с.м. фиг. 2) приняты
дук)пи1е обозиачсиия;
оп. дет -оиорпое Па111тяже:1ие фг;3ово1о дете Т(1ра от впс1и;;:его псточпика. паиряжение cnrna.ia с сииуспо11 обмот ки pOToria с;1пуспо-косппуспог(1 траис(Ьормаго11а; па :;ря/ке1пи i o;:in cnoii 1:1бли Тки ротора спп чпо-коси1г -спого ()орматора;
кв- напряжение квадратуры; и - напряжение после вынрямнтеля; бсм- напряжение нсточпнка смещающего панряження;
f/K- нанряженне коммутации ключа; под. sin-нанряженне сигнала на выходе схемы для подавлення квадратурной помехи;
i/под.кв-напряжение квадратуры на выходе схемы для подавленпя квадратурной помехи; . sin- выходное напряжение фазового
детектора от снгнала; . KB -выходное напряжение фазового
детектора от квадратуры;
кв. пост.- постоянная составляющая выходного нанряжения фазового детектора от квадратуры; Ф - угол отсечкн;
/ - время.
Снстема работает следующим образом. Нанряженне сигнала с датчика 1 ностунает на статорпые обмотки синусно-косинусного траисфорлштора 2 и с синусной обмоткн ротора этого трансформатора через схему 5 для нодавлення квадратурной номехи и усилитель неременного тока 7 подается на фазовый детектор 8, выходпое напряжение которого усплнвается усилителем мощности 9 и управляет нсиолннтельным механизмом 10, отрабатываюнхим ротор синусно-косинусного трансформатора 2 в согласованное ноложение.
Ключ 4 схемы 3 коммутируется нанряжепнем (7,(, получаемым следующим образом.
Наиряженпе Оcos с косннусной обмотки ротора сннусно-косннусного трансформатора 2 нодается на двухиолупериодный вынрямнтель 6. Вынрямленное несглаженное нанряжение f/B через источник смещающего нанряження5, например, в виде нараллельпой накоиительной RC-цепочкн, нодается на коммутнрующие цепи ключа 4.
В согласованном иоложенни сигнал в синусной обмотке ротора синусно-косинусного трансформатора 2 миннмален, а нанряжение в косинусной обмотке максимальное и незначительно меняется,нрн небольших углах рассогласовання. Поскольку сигнал в синусной и наиряжение в косинусной обмотках ротора синусно-косннусного трансформатора 2 индуктируются одним и тем же электромагннтным полем, создаваемым статорными обмотками сннусно-косинусного трансформатора 2, фазовый сдвиг между сигналом и управляющим напряжением схемы 3, для нодавлення квадратурной номехи весьма мал и не зависит от типов и нндивндуальных особенностей нримепяемых сииусно-косннусных трансформаторов, а также частоты и формы 1Н тающего нанряжения и температуры окружающей среды.
Вследствие этого угол отсечки будет симметричным относите;1ьно перехода через нуль
квадратуры п постояппая cocTaB/UH(jnj,aJi Bi)iходного напряженпя фазового детекто)а Ki ;i;iратуры будет близка к пулю.
Из дпагра.м.мы а на фпг. 2 видно, что ирц унравленнн схемой 3 для подавлепия квадратурпой номехи от косппусной обмоткп ротора спнусно-косинусного трансформатора 2 фазовый сдвиг в иоследнем, не превьппаюниш угол отсечкп 1|), не влияет на 1 елнчипу выходного напряжения этой схемы, иначе говоря не в;гпяет па ее коэффнциепт передачи и не вызьгвает появления постоянной составляюп1ей выходного нанряжепня фазового детектора 8 от квадратуры, так как не нару1пае1ся спмме ричиость угла отсечки относи гелыю перехода квадратуры через нуль.
Из диаграммы б (па фпг. 2) видно, что при управлении схемой 3 для иодавлеппя квадратурной номехн от внешнего исгочника фазовы сдвиг в синусно-косннуспом трапсформаторе.d уменьшает велнчпну выходного напряжени 1 этой схемы, т. е. уменьшает ее коэффиппе1гг передачи и нр;иводнт к пояплспню иостояппой составляющей выходпого напряжеппи фазового детектора 8 от квадратуры, с1И1жа10щей точность следящей системы, так как нарушается симметричность угла отсечки относительно нерехода квадратуры через пуль.
Возможны случан, когда сигнал на сппусно обмотке t/ампл.sin блнзок К макси.муму, а папряжепие на косипуспой обмотке Ьа,,,„л. cos минимально (см. ф11г. 3) . Это может иметь .место, например, в мо.мснт включения иитап 1Я следящей снстемы. Чтобы система могла нормально отработать в согласова1И1ое иоло 1 ение, параллельно схеме 3 для подавления квадратурной иомехн включен ограпичнтель .// ампл птуды сигнала по минимуму, которьи работает в то время, когда нанряжение па косинусной обмотке 1меет недостаточную для обеснечення коммутащи к.чюча 4 величии}, а алпь литуда сигнала на сипуспой обмотке превышает величину }1апряження ограипчеипя.
И р е д м е т и з о б р е т е н и я
Следян1,ая система, содержащая датчик, синусно-косинусный трансформатор, схему дл/i подавления квадратурной но.мехи, вьиюлиепную в виде ключа, управляемого двухполунсрнодным вынрямнтелем с отсечкой по yr.i усилители, фазовый детектор и исполпптельпый двпгатель, отличающаяся тем, что, с целью повыщения точности н надежиости системы, в ней доиолнителыю устаиовлеи ограиичитель амнлнтуды сигнала но минимуму, включенный параллельпо схеме для иодавлеппя квадратурной помехп, причем косппусиая обмотка ротора синусно-косипусного трансформатора подключена ко входу двухиолупс;риодного выпрямителя.
Ifofi 8em
i
t lixt --ОС
lf.m
и ампп.Со
Цампл. St-rt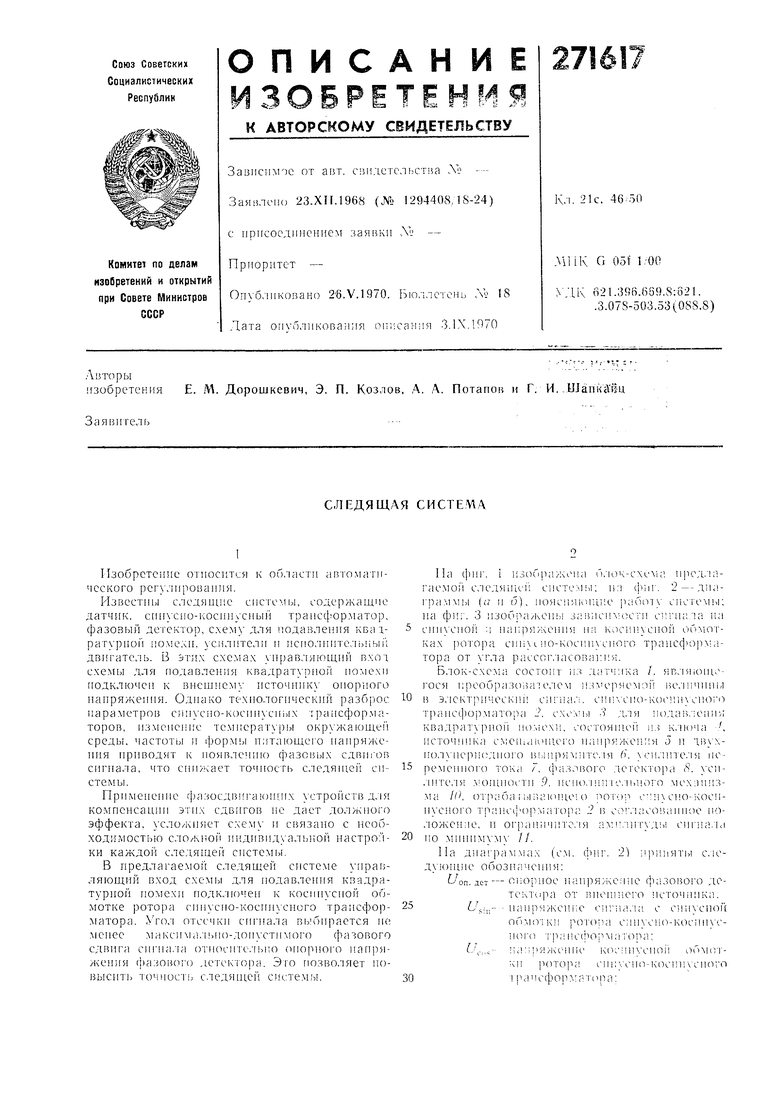
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1970 |
|
SU263014A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВО,! РОТОРНОГО ЭКСКАВАТОРА.ИТЕЛЬНОСТИ | 1971 |
|
SU306355A1 |
| Двухотчетный преобразователь углового перемещения в цифровой код | 1975 |
|
SU526932A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU298921A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU305457A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU288339A1 |
| СИЙУСНО-КОСИНУСМЬШ ПРЕОБРАЗОВАТЕЛЬ | 1971 |
|
SU316110A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU684578A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU332423A1 |
| СПОСОБ НАСТРОЙКИ ФАЗОВРАЩАТЕЛЯ | 1970 |
|
SU273267A1 |