1
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах числового программного управления контурной обработкой на металлорежущих и электроэрозионных станках и установках для электроннолучевой резки и сварки материалов.
Известны линейные интерполяторы с оценочной функцией, содержащие сумматоры, блоки вентилей, блок анализа знака, счетчики приращений координат, программный блок и задающие регистры. Недостатком этих интерполяторов является невысокая точность работы fl, 2.
Наиболее близким техническим решением к предложенному является линейный интерполятор, содержащий первые регистры сдвига, выдоды которых через первый сумматс подключены к их входам, элемент НЕ, второй сумматор, выход которого подключен ко входам блока определения знака оценочной функции и блока памяти, выход которого соединен со входом второго сумматора, и блок ввода программы, выходы которого подключены ко входу блока задания скороети и через вторые регистры сдвига ко входам блока сравнения З.
Недостатком известного устройства является возрастание погрешности интерполяции с уменьшением угла наклона кривой, ошибка при этом приближается к цене тага (дискрета).
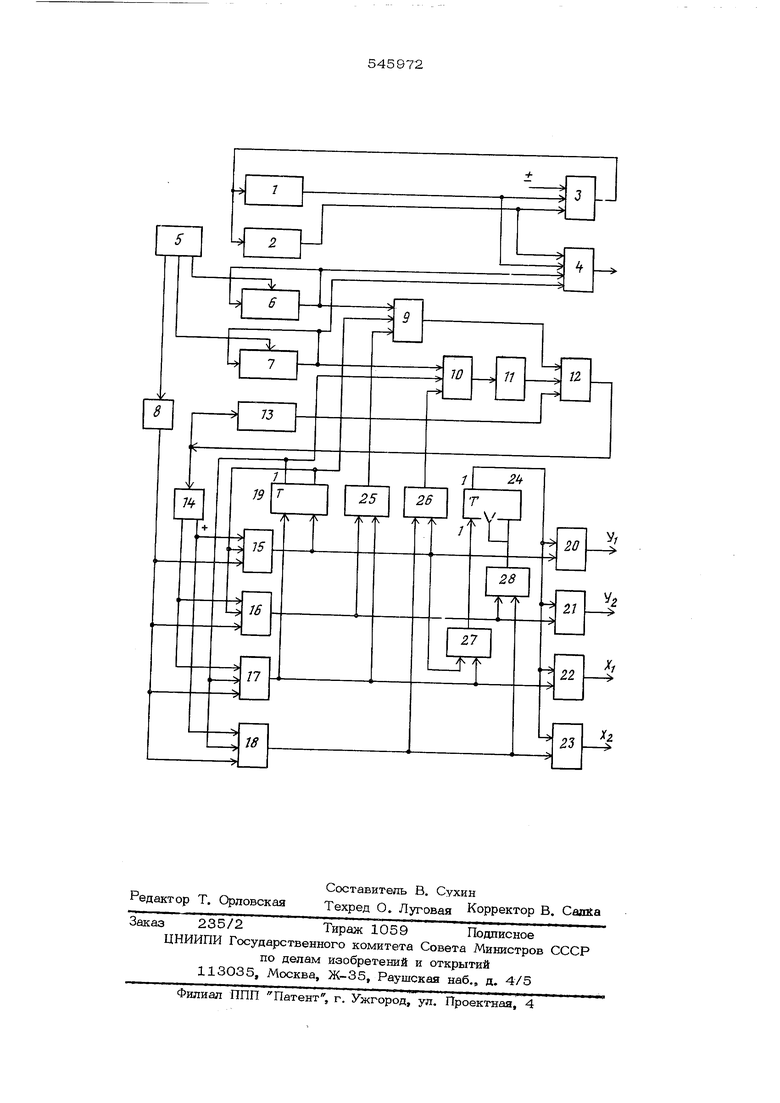
Цель изобретения - повышение точности работы интерполятора. Эта цель достпгается тем, что в интерполятор введены триггеры, элементы ИЛИ и двухвходовые и трехвходовые элементы И, Выходы первого триггера подключены к первым входам трехвходовых элементов И, выходы блоков задания скорости и определения знака оценочной функции подключены ко вторым и третьим входам первых трехвходовых элементов И,, выходы которых соединены со входами первого триггера, двухвходовых элементов И и элементов ИЛИ. Выходы первых эпекшнто ИЛИ подключены ко вторым входам вторых трехвходовых элементов И, выходы вторых элементов ИЛИ соединены с соответств тощими входами второго триггера, выход которого подсоединен ко входам двухвходовых элементов И. Выходы первых регистров сдв га подключены ко входам блока сравнения, выходы вторых регистров соединены с третьими входами вторых трехвходовых элемен тов И, выход первого из которых кепосредCTBeHHOj а выход второго через элемент НЕ подключены ко входам второго сумматора. На чертеже изображена функциональная схема предложенного интерполятора. Первые регистры сдвига 1 и 2 закольцованы с первым сумматором 3, при этом их выходы соединены со входами первого сумматора 3, а по другой цепи - с первыми двумя входами блока сравнения 4. Блой ввода программы 5 подключен выходами ко входам вторых регистров сдвига 6, 7 и блока задания скорости 8. Выходы регистров 6 и 7 соединены соответственно по одной цепи непосредственно с двумя другими входами блока сравнения 4, а по другой цепи - через один второй трехвходовый элемент И 9 на выходе регистра 6 и другой второй трехвходовый элемент И Ю и элемент НЕ 11 в цепи регистра 7 - с двумя входами второго сумматора 12, к третьему входу которого подключен выход блока памяти 13. Выход суммат-ора 12 соединен со входом блока 13 и со входом &1ока определения знака оценочной функции 14. Первые входы первых трехвходовых элементов И 15-18 подключены соответственно к нулевому и единичному выходам первого триггера 19, соединенным также со входами вторых трехвходовых элементов И 9 и 10. Вторые входы элементов И 15-18 подключены на выход блока задания скорости 8, а третьи входы элементов И 15, 18 и 16, 17 соединены соответственно с плюсовым и минусовым выходами блока 14. Единичный вход триггера 19 соединен с выходом элемента И 17, а нулевой вход - с вы ходом элемента И. 15. Первыми входами двухвходовые элементы И 2О, 21, 22 и 23 соединены с выходами элементов И 15,16, 17 и 18 соответственно, а вторыми входами - с единичным выходом второго триггера 24. К выходам элементов И 16,17 и 15, 18 через первые элементы ИЛИ 25 fi 26 подсоединены соответствен но третьи входы логических элементов И 9 и 10. По другим цепям через второй эле мент ИЛИ 27 выходы элементов И 15, 17 соединены с единичным входом триггера 24; а выхода элементов И 16, 18 че рез другой второй элемент ИЛИ 28 - со счетным входом того же триггера. Рабочими выходами интерполятора являются по координате X выходы элементов И 22 т 23 по координате Y - выходы элементов И 20 и 21. Регистры сдвига 1 и 2 предназначенл ля хранения текущих значений координат -, промежуточных точек отрабатывамых участков и в начальный момент нахо ятся в нулевом положении. В регистры 6 7 из блока 5 заносятся значения координат X j , У конечной точки участка. В процессе интерполяции в пределах данного трезка содержимое этих регистров не меняется. БЛОК 4 предназначен для сравнения ырабатываемых сумматором 3 значений оординат промежуточных точек х, у; с оординатами к , V, и выдачи сигнала к9ец о;гработкн кадра. Блок 13 служит для хранения текущего начения оценочной функции Т , определямой с помощью сумматора 12 в соответ твии с формулами: при шаге по оси X, V. - р . . -v X T-i 11 при шаге по оси У. Блок определения знака оценочной функции 14 запоминает знак вычисленного значения оценочной функции. Блок задания скорости 8 тактирует работу интерполятора с частотой, которая определяется наклоном отрезка к осям координат. Принцип работЬ интерполятора следующий. Каждому шагу в направлении любой из двух осей координат предшествует вычисление оценочной функции. Если при этом знак оценочной функции не меняется, то вырабатывается управляющий сигнал шага по той же оси координат с максимальной ценой дискретности, в данном случае - удвоенной. В случае когда происходит изменение знака оценочной функции, вырабатывается укороченный, дробный шаг в том же направлении и происходит переключение триггера 19 и вместе с этим - изменение направления следующего шага. Процесс продолжается до совпадения текущих и конечных значений отрезка интерполяции, после чего от блока ввода прогршхгмы 5 поступают в регистры 6, 7 и блок задания скорости 8 данные об очередном участке интерполяции. В начальный момент регистры 1, 2 и блок 13 находятся в нулевом состоянии. В регистры 6 и 7 занесены значения Xj и V соответственно. Триггер 19 находится в единичном положении, соответствующем отсчету по оси координат X. Триггер 24 находит ся в нулевом положении, разрешающий сигнал с выхода блока определения знака 14 по плюсовой шине подается на входы элемей-гов И 15 и 18. Интерполирование начина-ется с подсчета значения и определения зна ка оценочной функции в предположении сметевЕЕЯ на шаг по оси X. В данном случае родсчет Вддё7 ся по ЧМ- И- КОбратный код значения Y с. регистра 7 через элемент И 10, оихрытый разрешающим потенциалом с выхода триггера 19, поступает в сумматор 12 и вычитается из, значения : , в начальный момент равного нулю. Вычисленное значение ; зано-, сится в блок 13, а знак его запоминается блоком определения знака 14. Через элемент И 18, открытый разрешающими потенциалами с единичного выхода триггера 19 и с плюсового выхода блока определения знака 14, и элемент ИЛИ 28 управляющий сигнал устанавливает триггер 24 в единичное состояние, йри этом на элементы И 2О-23 подается разрешающий потенциал. Если знак оценочной функции изменился, то с минусового выхода блока определения знака 14 подается разрешающий потенциал на вход элемента И 17 и на выходе X интерполятора появится импульсный сигнал управления дробным шагом по оси координат X. Через элемент ИЛИ 25 управляющи сигнал поступает на вход элемента И 9, и производится подсчет очередного значения оценочной функции по формуле PVJ.. -.-- Триггер 19 переключается в нулевое положение, соответствующее движению вдоль оси V . Временная задержка сигнала переключения на схеме опущена. При переключении триггера 19 подается разрешающий потенциал на входы элементов И 15, 16. Если знак оценочной функции не изменился, например остался отрицательным, то по цепи из элементов И 16 и 21 на выход Yj интерполятора проходит управляющий сигнал перемещения на один полный щаг с максимальной дискретностью по оси Y . Триггер 19 остается в предыдущем положении и подсчет следующего значения оценочной функции будет вестись по той же формуле. Если в результате вычисления знак оценочной фун ции изменился, например стал положительны то вырабатывается управляющий сигнал на отработку дробного шага по оси Y , поступающий с выхода У. элемента И 20. Сле дующее значение оценочной функции подсчитывается по формуле Т- . 7- - , 4+i,j 1 к Триггер 19 переключается в единичное положение, соответствующее шагу по оси координат X, и схема продолжает работать по описанному алгоритму. 54 2 Прнменеш- е даккого нкгерпогштора ; теме программного упраЕленкя cTais.. .позволяет значительно повысить т,)чкос обработки. Ф о р м j- л а из Линейный интерполятор с ; цией, содержащий первые реп выходы которых через первь й су;-.;м ключены ко входам данных ретиг.тр,: мент НЕ, второй сумматор, .г ь: подключен ко входам блока onpe. ка оценочной функции ц бпока псл. : которого соединен ее БХОДОХ: зториго cv: тора, и блок ввоца прогрг,::.,:ь, , рого подключены ко входу cnoiu; аацалия скорости и через вторые регисгры ко входам блока сравнеЕпя. о т :i щ и и с я тем, чт с цепью поЕк:11ек)1Я точности интерпол4Т1 гира, в неге Бзет;е;ъ; триггеры, элементы к дЕухБХО,;,овь; ii трехвходовые элементы 11 выходь гервогс триггера подключены к перБЫ входовых элементоБ И, выходы блокоБ з дания скорости и определения знака оцого--го; функции подключены ко вторьн./; ;: грегь; ;; входам первых трехвходовьзх эпе:-:е:п:-с iJ, выходы которых соединеиз: со вхоцам;; ;}.р вого триггера двухвходовых элеменг-.З П и элементов ИЛ1-1, выходы перхзьзх эле :е::: тов ИЛИ подключены ко вторым зхол,. ;vrc рых трехвходовых элемент-ов lu БЬ;Л-СДХ-, STJ рых элементов ИЛИ соединены с coort vrcT вуюшими входами второго триггера, зь::,од которого подсоединен ко входал; двухьходс вых элементов И, выходы пернь;х регмсгро сдвига подключены ко входа; блока сраэне ния; выходы вторых регистров соед1л--5нъ- с третьими входами вторых трехБходстлых зпементов И, выход первого из которьх ueijocредственно, а выход второго через эг;е.;е;гг НЕ подключены по входам второго су;-. ра. Источники информации, принятые .вс мание при экспертизе; 1.Агурский М,С. и др. Числоиое раммное управление станками, AL, . построение ; 1966, стр. 174-179. 2.Авторское свидетельстве .Vj Кл- q 05 В 19/20 от 17.05.71 г, 3.Сб. Способы подготовки пpoгpa интерполяторы для контурных систем вого управления станками, л,. Млшин, ение, 197О , стр. 52-57.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой линейный интерполятор с оценочной функцией | 1981 |
|
SU991375A1 |
| Цифровой интерполятор | 1981 |
|
SU1003022A1 |
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
| Интерполятор | 1987 |
|
SU1413602A1 |
| Многокоординатный цифровой интерполятор | 1986 |
|
SU1315939A1 |