Известны автооиераторы с двумя захватами для валов, которые движутся поочередно, осуществляя движепия, необходимые для снятия обработанного вала и укладки очередного вала в станок, а также для снятия заготовки и укладки обрабатываемого вала на транспортер.
Однако такой автооператор имеет два захвата, которые движутся иоочередно, вследствие чего на цикл работы затрачивается сравнительно много времени.
Цель изобретения - создание автооператора, в котором цикл загрузки и выгрузки осуществлялся бы за один ход захватывающего устройства.
Это достигается тем, что в предложенном автооператоре захватывающее устройство выполнено в виде вилки с двумя параллельными пазами с прижимом маятникового типа.
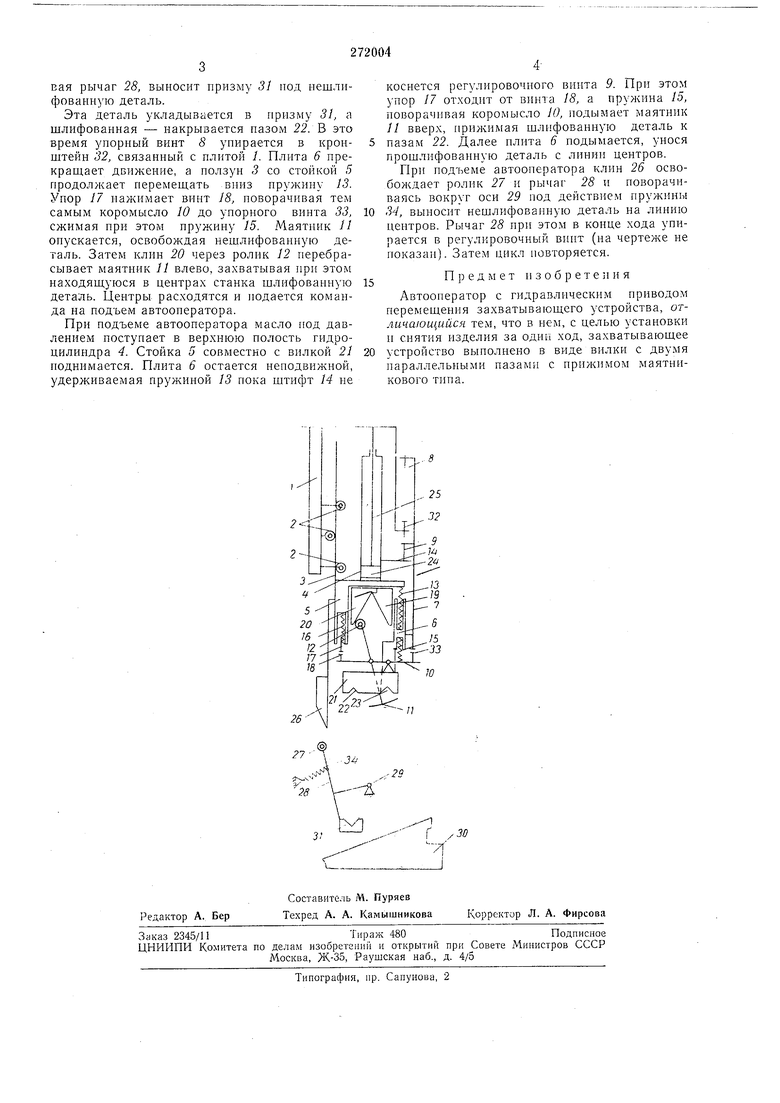
На чертеже показана схема автооператора (иоложение маятника // иеред загрузкой и положение нешлифованной детали).
На тележке, которая перемещается по порталу от станка к транспортеру и обратно, укреплена плита / с роликами 2, в которых перемещается ползун 3, несущий гидроцилиндр 4 со стойкой 5. В стойке 5 вмоитирована подвижная плита 6, к которой прикреплена планка 7 с регулировочными винтами 8 и 9, К плите 6 шарнирно ирикреплено коромысло
10 с маятником //.В верхней части маятника установлен ролик 12. Плита 6 и стойка 5 расиираются между собой пружиной 13, при этом регулировочный вннт 9 упирается в штифт 14, запрессованный в стойку 5. В плите 6 вмонтирована пружина 15, воздействующая на коромысло W. В стойке так же смонтирована пружина 16, которая через упор 17 и винт 18 воздействует на коромысло 10. В стойке 5 вмонтированы два клина 19 и 20, которые имеют возможность совместного продольного перемещения.
К нижней части плиты 6 прикреплена вилка 21 с двумя параллельными пазами 22 и 23
V-образиой формы. В гидроцилиндре 4 располагается порщень 24 со титоком 25. Масло подается через щток в обе полости гидроцилиндра (шток двойной, пустотелый). К стойке 5 прикреплен клин 26, котопый при опускании воздействует на ролик 27, укрепленный на рычаге 28, который, качаясь на оси 29, установленной в кронштейне, закрепленном на столе 30, переноснт призмы ЗГ с линии центров станка на линию паза 23.
Описанный автоонератор работает следующим образом.
Когда масло под давлением поступает под порщень 24, стойка 5 вместе с вилкой 21 спускаются вниз. В процессе пеоемещення вниз
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1974 |
|
SU492375A1 |
| АВТООПЕРАТОР | 1972 |
|
SU344960A1 |
| Автоматическая линия | 1975 |
|
SU663547A1 |
| АВТООПЕРАТОР ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ТЕХНОЛОГИЧЕСКОГО И ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 1970 |
|
SU261251A1 |
| АВТООПЕРАТОР | 1973 |
|
SU368007A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Автооператор | 1973 |
|
SU478708A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
