1
Изобретение .может применяться в зуборезных станках для загрузим заготовок и снятия готовых изделий.
Известны автоолераторы, в которых для оббспечеяия о дно B.peiM единой загруз1{и н выгруз1ки деталей шрвменены две меха1ни;чеок11е руки, ОМОНТ1Ировааные на штангах, связанных между собой шестерней и приводимых от гидроцилиядра, размещенного в корлусе с «опирати, образующими пазы, по которым перемещаются .пальцы пилотов, жестко укрепленных на щтангах.
Предлагаемый ащтооператор отличается от известных тем, что 1М€ханиз;м сброса .вьшолнен в виде вилки с nasoiM, .меньшим .диаьметра изделия, причем (ВИлка подпружинена относительно корпуса в /направлении шии нделя изделия и связана с рычагом, управляемым штангой.
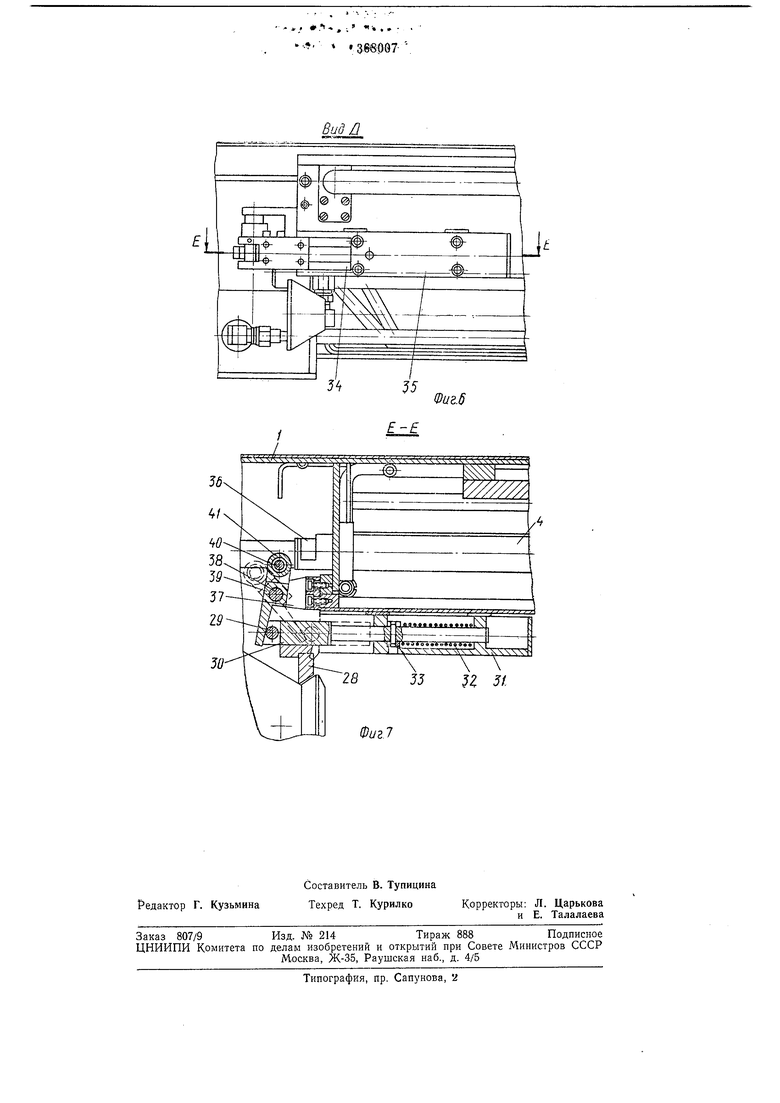
На фиг. 1 изоб|ражен описывае:мый автооператор, продольный раэрез; на фиг. 2 и 3 разрезы по А-А и Б-Б на фиг. 1; на фиг. 4 - раэрез по В-В на фиг. 3; на фиг. 5 - вид по стрелке Г на фиг. 3; на фиг. 6 - вид по стрелке Д (повернуто) на фиг. 1; на фиг. 7 - разрез по Е-Е на фиг. 6.
В корпусе / автооператора, установленном на стойке 2 бабки изделия 3, смонтирована щтанга 4, на которой жестко крепится пилот 5. В расточках пилота в подшипниках 6 расположена цапфа 7 с размещенной на ней шестерней 8, которая сцеиляется с зубчатым сектором 9, жестко сидящим на валу 10. Этот вал установлен в пилоте на подшипниках //.
В зубчатом секторе смонтирован палец 12,
на котором на игольчатых подщипннках 13
размещена втулка 14, входящая в паз между
копира.ми 15 и 16.
В пилоте неподвижно установлен палец 17
с подшипниками 18, разделенными между собой и от пилота втулками 19. Подшипники входят в паз между копирами 20 и 21, жестко соединенными с корпусом.
На корпусе смонтирован кронштейн 22,
несущий золотник 23 с рычагом 24.
Для управления золотником на конце штанги установлен упор 25 специального профиля. В расточке цапфы размещен кронштейн 26
с цангой 27. Для снятия готового изделия со шпинделя бабки изделия автооператор имеет вилку 28 и палец 29, установленные на штанге 30, которая смонтирована с возможностью перемещения в расточках корпуса 31. В этом
корпусе расположены пружина 32 и упор 33, жестко связанный со щтангой.
Штанга своими гранями 34 входит в корпус 35, жестко соединенный с корпусом /. Для привода вилки на штанге установлен
jnop 36, а на корпусе смонтирован кронштейн
37 с пальцем 38. На последнем укреплен рычаг 39 с пружиной (на чертеже не показана) и пальцем 40 с роликом 41.
Для прнвода всего механизма автооператора на корпусе установлен гидроцилиндр 42, шток 43 которого через кронштейн 44 жестко связан с пилотом, а на скобе 45 имеется упор 46.
Автооператор работает следующим образом.
При повороте шпинделя бабки изделия 3 из зоны резания в зону загрузки поступает команда от механизма управления станка на гидроцилиндр 42. Под давлением масла шток гидроцилиндра 43 втягивается и через кронштейн 44 перемешает пилот 5. Следовательно, механическая рука вместе с заготовкой иеремеш,ается к шпинделю бабки изделия. Одновременно перемешается штанга 4 с упорами 25 и 36. При этом последний из них, воздействуя на ролик 41, поворачивает рычаг 39 на заданный угол. Этот рычаг через палец 29 упирается в штангу 30 с вилкой 28 и сбрасывает обработанную заготовку. Как только упор 36 выходит из контакта с роликом 41, механизм сброса 32 изделий под действием пружины занимает исходное положение.
При дальнейшем движении механической руки ролик, перемеш,аясь по пазу между копирами 15 и 16, поворачивает зубчатый сектор 9 вместе с валом 10.
Зубчатый сектор, взаимодействуя с шестерней 8, поворачивает цапфу 7 на 180°. Точность поворота обеспечивают упоры 46 на скобе 45.
При подходе заготовки к бабке изделия 5 упор на штанге 4 переключает золотник 23, и заготовка зажимается на онравке.
После загрузки и зажима заготовки команда от специального механизма управления подается на гидроцилиндр 42. Шток 43 выводится из гидроцилиндра 42 и перемешает механическую руку в противоположном направлении. Упор 25 переключает золотник гидроцилиндра, команда от которого поступает на новорот бабки изделия с заготовкой в зону резания.
При обратном ходе механической руки под действием ролика, перемешаюшегося по пазу между копирами 15 и 16, механизм захвата заготовки поварачивается на 180°, цанга 27 входит в отверстие очередной заготовки поданной любым подаюш,им устройством. В конце хода упор 36 контактует с роликом 41, который поворачивает рычаг 39 вправо. При этом второй конец рычага отходит от пальца 29, а вилка 28 не перемещается. Как только
упор 36 выходит из контакта с роликом 41, рычаг 39 под воздействием пружины нижним концом прижимается к пальцу, и загрузка заканчивается.
Предмет изобретения
Автооператор для загрузки заготовок, например, конических колес с мехащической рукой, смонтированной на штанге с возможностью продольного перемешения вдоль оси шпинделя изделия, и механизмом сброса обработанной заготовки, отличающийся тем, что, с целью упрощения конструкции, механизм сброса выполнен в виде вилки с пазом, меньшим диаметра изделия, причем вилка подпружинена относительно корпуса в направлении шпинделя изделия и связана с рычагом, управляемым штангой.

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР | 1972 |
|
SU344960A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| Автооператор | 1979 |
|
SU772809A1 |
| АВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ ЧЕРНОВОЙ ОБРАБОТКИ КОЛЕЦ НЕПРАВИЛЬНОЙ ФОРМЫ | 1969 |
|
SU252812A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Автооператор | 1969 |
|
SU344701A1 |
| СТАНОК ДЛЯ СУПЕРФИНИШНОЙ ОБРАБОТКИ КОЛЕЦ | 1992 |
|
RU2033916C1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Автооператор | 1976 |
|
SU729028A1 |
| Станок для обработки шеек крупногабаритных коленчатых валов | 1975 |
|
SU572369A1 |

0
-UJ Ф//г.7
Фиг.6
-
rv
J5 Дг 31
