Изобретение касается загрузочных устройств металлорежущих станков и может найти применение в различных отраслях техники.
Известны автооператоры для загрузочноразгрузочных работ на металлорежущих станках, привод которых через конирную муфту и скобу связан с захватами.
Предлагаемый автооператор отличается от известных тем, что в нем с целью упрощения конструкции с одновременным расширением технологических возможностей копирная муфта выполнена из двух зубчатых полумуфт, первая из которых жестко связана с приводом, а вторая - со скобой, в которой она установлена с возможностью вращения, и подпружинена на первую полумуфту, причем копирные пазы выполнены на свободном конце второй полумуфты и имеют последовательно больщую и меньщую глубину.
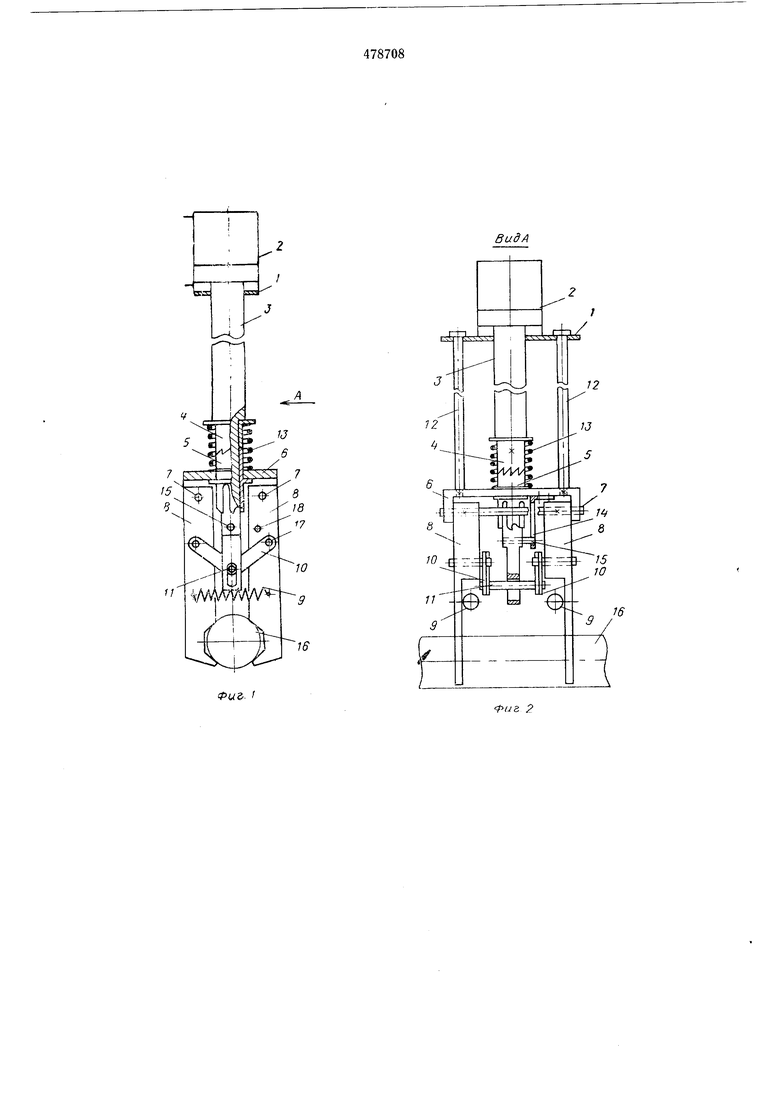
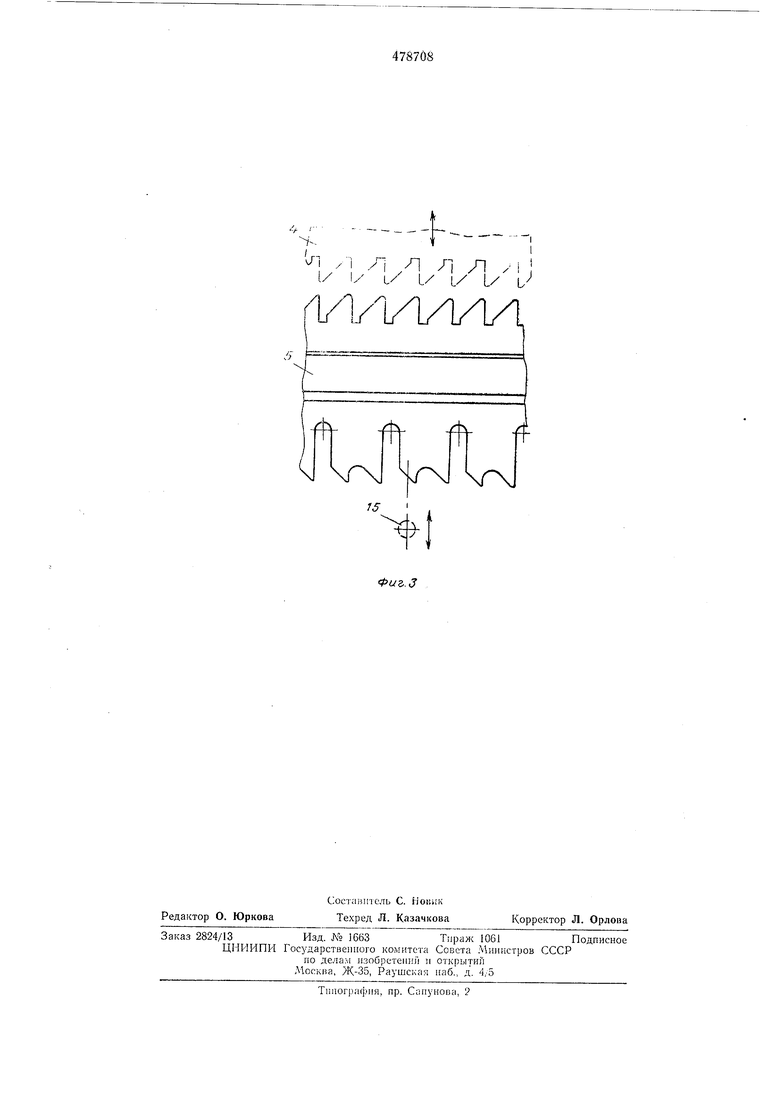
На фиг. 1 представлен предлагаемый автооператор, вид с торца загружаемой детали; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - развертка зубчатой полумуфты с конирными пазами.
Па плите 1 укреплен гидроцилиндр (или пневмоцилиндр) 2, являющийся приводом автооператора. Па штоке 3 гидроцилиндра 2 жестко посажена зубчатая полумуфта 4 и свободно - зубчатая полумуфта 5, образующие совместно зубчатую муфту. Последняя соединена со скобой 6 и зафиксирована относительно нее от осевого перемещения, т. е. может вращаться.
В скобе 6 свободно установлены оси 7, на которых жестко укреплены захваты 8, стягиваемые попарно пружинами 9. Захваты 8 также попарно соединены шарнирными серьгами 10, имеющими общую ось 11, помещенную в паз штока 3.
В скобе 6 укреплены скалки 12, подвижно установленные в плите 1, но ограничивающие ход скобы 6. Кроме того, скоба 6 с полумуфтой 5 подпружинена относительно штока 3 пружиной 13.
Для предотвращения вращения штока 3 на скобе 6 установлен кронщтейн 14, в паз которого входит штифт 15, установленный в штоке 3.
Автооператор может быть как загрузочным, так и разгрузочным.
Порядок работы автооператора при загрузке следующий. Паходясь над транспортером, автооператор движется вниз с раскрытыми захватами, которые в конце хода закрываются. Затем он движется вверх с деталью в захватах (последние закрыты). При следующем ходе вниз (после перемещения каретки к станку) автооператор приносит деталь на ось центров станка и удерживает ее там. При
следующем ходе вверх захваты должны сначала раскрыться, а затем уже двигаться вверх. Далее цикл работы повторяется.
Порядок работы автооператора при разгрузке аналогичен, но смещен по фазе: автооператор берет деталь в станке и оставляет ее на транспортере.
На фиг. 1 и 2 автотранспортер изображен в положении, когда он принес деталь 16 на позицию загрузки (станка или транспортера) и удерживает ее. В таком полол :ении автооператор может вносить деталь в патрон станка, либо центры станка могут захватывать деталь и т. д. Из этого положения автооператор должен быть отведен без детали 16.
Автооператор работает следующим образом.
В начале хода щтока 3 вверх скоба 6, подпружиненная пружиной 13, остается в покое. При этом полумуфта 4 отходит от полумуфты 5, а штифт 15 попадает на ско.с копирного паза полумуфты 5 и поворачивает ее на некоторый угол, пока штифт не попадает в глубокий паз этой полумуфты. При дальнейшем движении штифта 15 по цазу полумуфты 5 кромка паза воздействует на ось И, в результате чего серьги 10 поворачиваются и разжимают захваты 8, освобождая деталь 16 (пружина 13 должна при этом создавать усилие, достаточное для удержания скобы 6 в покое). Пройдя мертвое положение, т. е. когда центр оси И становится на линию центров осей 17, , серьги 10 останавливаются упором 18 на захват 8, фиксируя эти захваты в открытом положении. При этом штифт 15 доходит до конца паза в полумуфте 5, в результате чего при дальнейшем ходе штока 3 вверх скоба 6 и захваты 8 движутся совместно.
Следующим ходом вниз захваты должны захватить деталь. При ходе штока 3 вниз (в концах хода) скалки 12 взаимодействуют с
плитой I и останавливают скобу 6 с захватами 8. Шток 3, продолжая движение, воздействует на ось 11 и переводит серьги 10 в положение, обеспечивающее захват детали. В конце хода штока -полумуфта 4 косыми зубьями воздействует на такие же зубья полумуфты 5 и поворачивает ее еще на некоторый угол так, что при последующем ходе шока вверх штифт 15 попадает на скос следующего паза полумуфты 5.
При следующем ходе щтока вверх штифт 15 попадает в мелкий паз нолумуфты 5 таким образом, что штифт 15 доходит до конца паза полумуфты 5 и перемещает скобу 6 с захватами 8, а шток 3 не доходит до оси 11 и не раскрывает захваты 8. Автоолератор движется вверх с деталью в захватах.
При следующем ходе вниз полумуфта 4 вновь поворачивает полумуфту 5 па некоторый угол так, что против штифта 15 вновь устанавливается глубокий паз, т. е. автооператор устанавливается в первоначальное положение, и цикл работы повторяется.
Предмет изобретения
Автооператор для загрузочно-разгрузочпых работ на металлорежущих станках, привод которого через копирную муфту и скобу связан с захватами, отличающийся тем, что, с целью упрощения конструкции с одновременным расширением технологических возможностей, копирная муфта выполнена из двух зубчатых полумуфт, первая из которых
жестко связана с приводом, а вторая - со скобой, в которой опа установлена с возможностью вращения, и подпружинена на первую полумуфту, причем копирные пазы выполнены на свободном конце второй полумуфты и
имеют последовательно больщую и меньшую глубину.
.2
/
Фи&.
ВидА
-1 Л .л /I л M 1
/ / L/ L/ L/ L/ L
4J
--.-t I
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1974 |
|
SU507431A2 |
| Автооператор | 1976 |
|
SU569431A2 |
| Автооператор | 1979 |
|
SU841908A1 |
| Автооператор | 1982 |
|
SU1016135A1 |
| Автооператор | 1977 |
|
SU722733A1 |
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Автооператор | 1981 |
|
SU1028467A1 |
| АВТООПЕРАТОР ПОВОРОТНЫЙ ДВУХЗАХВАТНЫЙ | 1970 |
|
SU275672A1 |
| ПЕРЕНАЛАЖИВАЕМОЕ УСТРОЙСТВО С ПРОГРАММНЫМ УПРАВЛЕНИЕМ ДЛЯ ТРАНСПОРТИРОВКИ И ПЕРЕГРУЗКИЗАГОТОВОК | 1969 |
|
SU246290A1 |
| Автооператор | 1982 |
|
SU1060406A1 |