Изобретение относится к области обработки металлов давлением и может быть иснользовано при нроектировании прессов-автоматов.
Известны ме.ханизмы выталкивания . прессов-автоматов, содержание установленные в станине два двуплечих рычага, связанных между собой с одной стороны регулируемой тягой и взаимодействующи.х с другой стороны соответственно один с выталкивателем, а второй с приводом. Недостатком таких механизмов является то, что они не имеют бесступенчатой регулировки величины хОлДа выталкивателя, что приводит к появлению зазоров и ударов.
С целью ликвидации указанного недостатка на взаимодействующем с приводом рычаге в месте соединения с регулируемой тягой установлена шарнирно с ней связанная ползушка, имеющая возможность перемещения вдоль рычага.
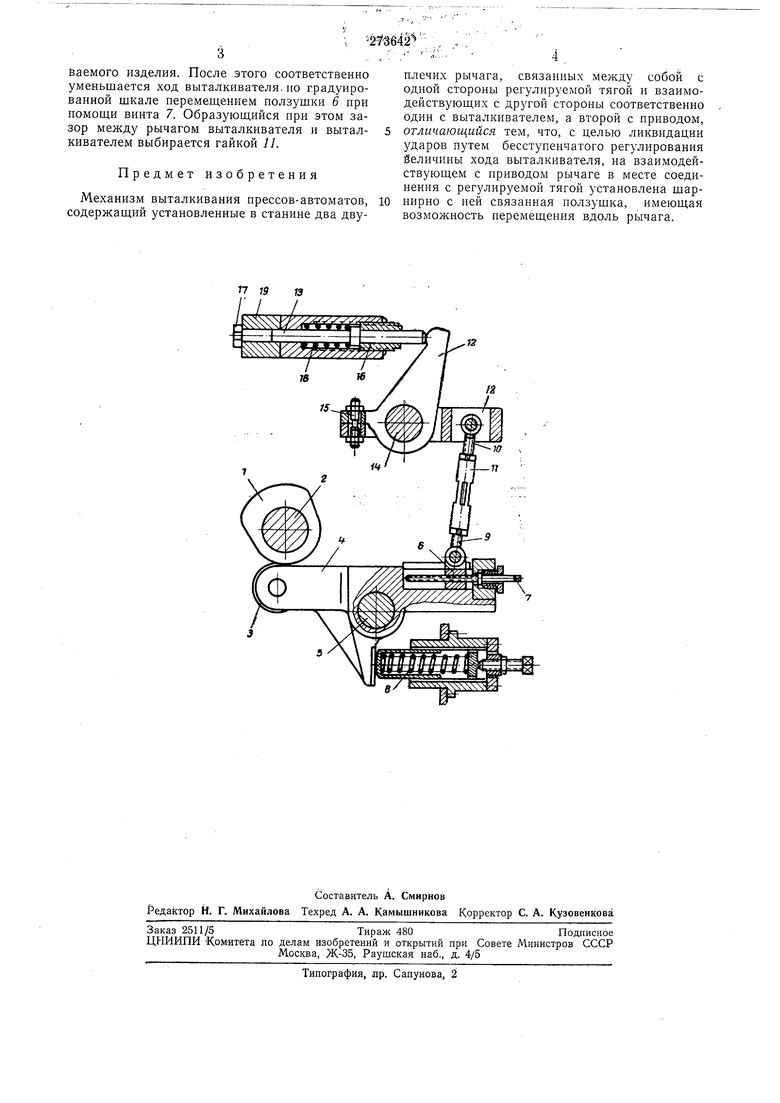
На чертеже схематически изображен онисываемый механизм выталкивания.
Механизм состоит из кулака 1, укрепленного на кулачковом валу 2, ролика 3, расположенного в вилке подпружиненного двуплечего рычага 4, установленного на неподвижной оси 5, один конец которого взаимодействует с кулачковым приводом, а на другом установлена нолзущка 6, неремещаемая регулировочным винтом 7 в пазу рычага, выполненного в виде направляющих, нружипы 8, выбнрающей зазор в паре ролик-кулак, и регулируемой тяги, выполненной в внде двух винтов 9 и 10 с правой и левой резьбой и стяжной гайки п. Винт 9 щарнирно соединен с ползущкой, а винт 10 также шарпирно - с двуплечим рычагом 12 выталкивателя 13, который укреплен на неподвижной оси 14. Плечи рычага соединены разрывной шпилькой 15. Регулировочная гайка 16 определяет ноложение выталкивателя в завнсимости от длины выталкиваемого изделия 17. Пружина 18 возвращает в ис.ходпое положение выталкиватель в матрице 19.
Механизм работает следующим образом.
Приводной вал с укренленным на не.м кулаком через ролик 3 передает качательиое движение рычагу 4, который, поворачиваясь вокруг оси 5, через ползущку 6, регулируемую тягу, двуплечий рычаг выталкивателя приводит в движение выталкиватель, выталкивающий изделие из матрицы. В исходное положение система рычагов возвращается нружиной 8, которая прн .ходе выталкивателя находится в сжатом состоянпи, а выталкиватель- пружиной 18.
При уменьшении длины выталкиваемого изделия вь бирается зазор между изделием и выталкивателем перемещением гайки 16 до те.ч пор, пока выталкиватель не коснется выталкиБаемого изделия. После этого соответственно уменьшается ход выталкивателя, по градуированной шкале перемеш,ением ползушки 6 при помощи винта 7. Образуюш,ийся при этом зазор между рычагом выталкивателя и выталкивателем выбирается гайкой 11.
Предмет изобретения
Механизм выталкивания прессов-автоматов, содержаший установленные в станине два двуплечих рычага, связанных между собой с одной стороны регулируемой тягой и взаимодействуюш,их с другой стороны соответственно один с выталкивателем, а второй с приводом, отличающийся тем, что, с целью ликвидации ударов путем бесступенчатого регулирования 18еличины хода выталкивателя, на взаимодействующем с приводом рычаге в месте соединения с регулируемой тягой установлена шарпирно с ней связанная ползушка, имеющая возможность перемещепия вдоль рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕСС КРИВОШИПНЫЙ | 1998 |
|
RU2146197C1 |
| Механизм выталкивания | 1979 |
|
SU841776A1 |
| Автомат для высадки | 1972 |
|
SU471944A1 |
| Устройство для прерывистой подачи материала | 1971 |
|
SU515555A1 |
| ХОЛОДНОВЫСЛДОЧНЫЙ ДВУХУДАРНЫЙ АВТОМАТ | 1972 |
|
SU352702A1 |
| Механизм переноса заготовок | 1976 |
|
SU664738A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ИЗ ДЛИННОМЕРНОГО МАТЕРИАЛАВСЕСОЮЗНАЯ11Я?|1Т§10-ТЕХНН'{?01! | 1972 |
|
SU332902A1 |
| ПРУЖИКОНАВЙВОЧНЫЙ АВТОМАТ | 1968 |
|
SU211508A1 |
| УСТРОЙСТВО ДЛЯ ВЫТАЛКИВАНИЯ ДЕТАЛЕЙ К МЕХАНИЧЕСКОМУ ПРЕССУ | 1972 |
|
SU421546A1 |
| Устройство для мерной подачи заготовки | 1981 |
|
SU1050865A1 |
П 75
//
1
15
12
