Изобретение относится к области контроля перемещения транспортного механизма, например штыревого крана, относительно штырей электролизера для получения алюминия.
Известна система автоматического управления и контроля перемещения транспортного механизма, например манипулятора гальванического цеха, обслуживающего гальванические ванны, включающая датчики пути, адресные задатчики и устройства сравнения.
Однако вследствие различий в конструкции и характере работы известная система не может быть использована для контроля перемещений щтыревого крана в цехе.
В предлагаемой системе датчики пути через редукторы связаны с ходовыми колесами фермы и тележки крана, выходы датчиков пути ноданы на сравнивающие устройства типа миллиамперметра, на вторые входы которых подано напряжение адресных задатчиков.
В системе также датчик пути выполнен в виде потенциометра, ось движка которого связана с пружиной возврата потенциометра в исходное положение и с электромагнитной муфтой, обеспечивающей соединение оси движка с редуктором.
женный на ферме крана, укреплен на гайке, ходовой винт которой через электромуфту соединен с двигателем настройки исходного положения тележки.
5 Предлоясенное устройство позволяет оператору контролировать перемещение крана относительно щтырей алюминиевого электролизера.
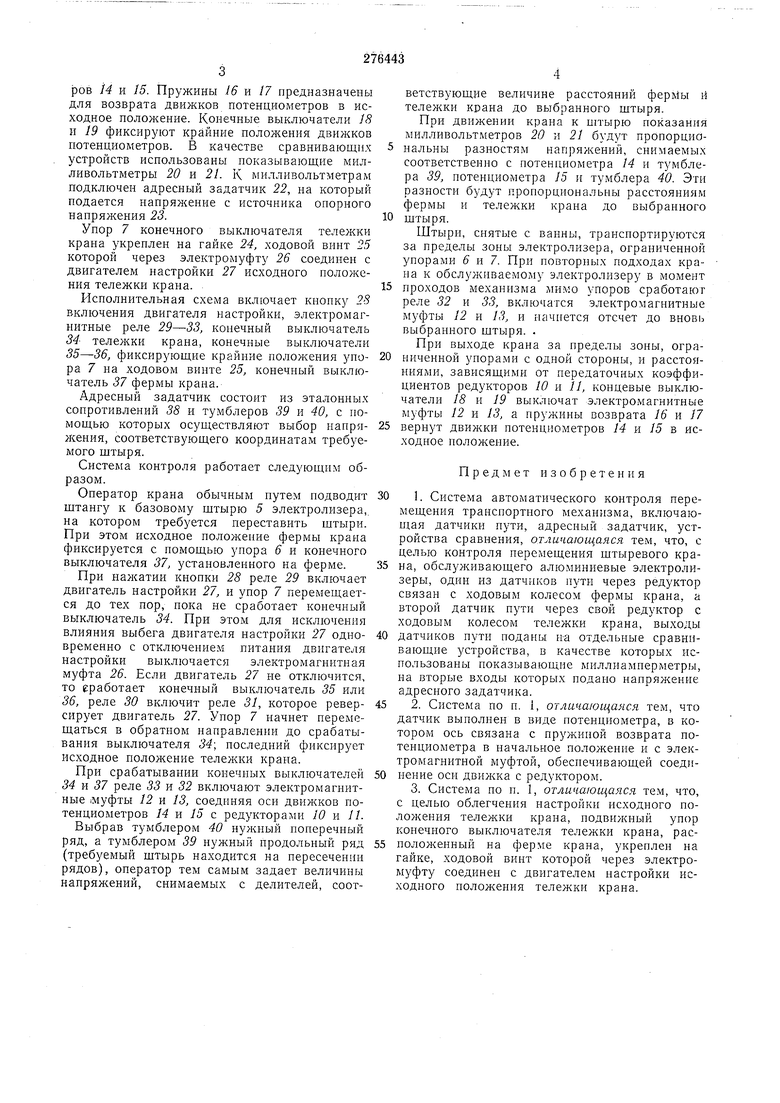
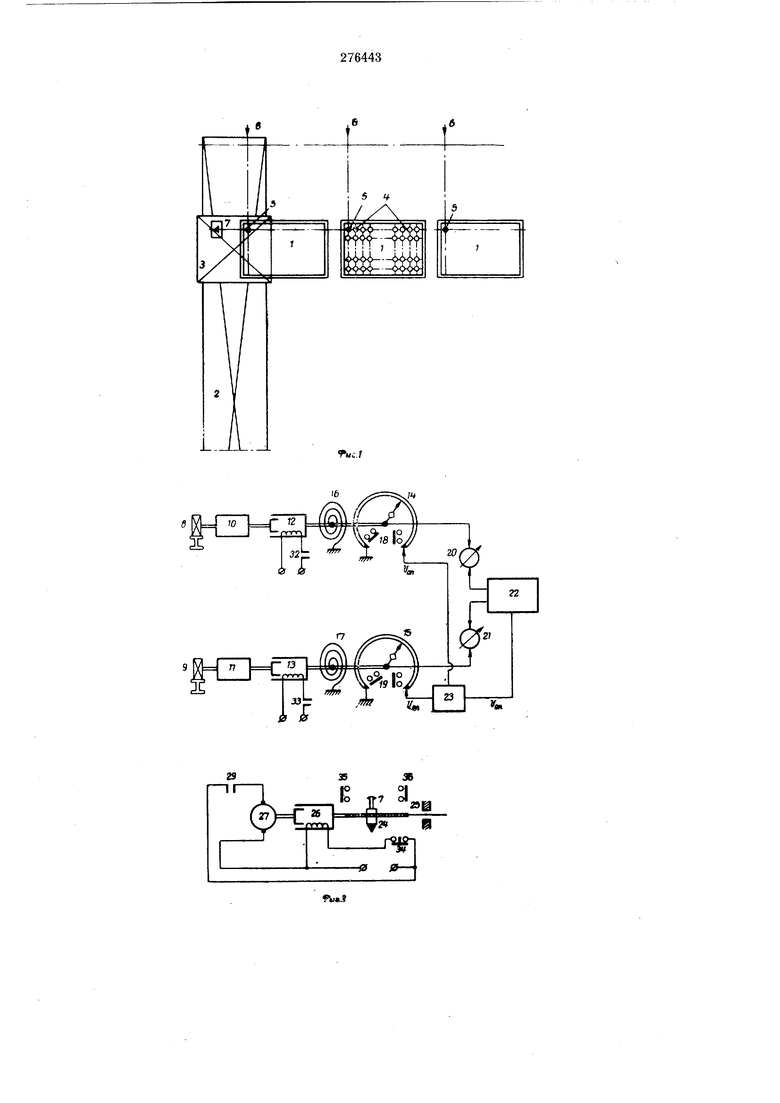
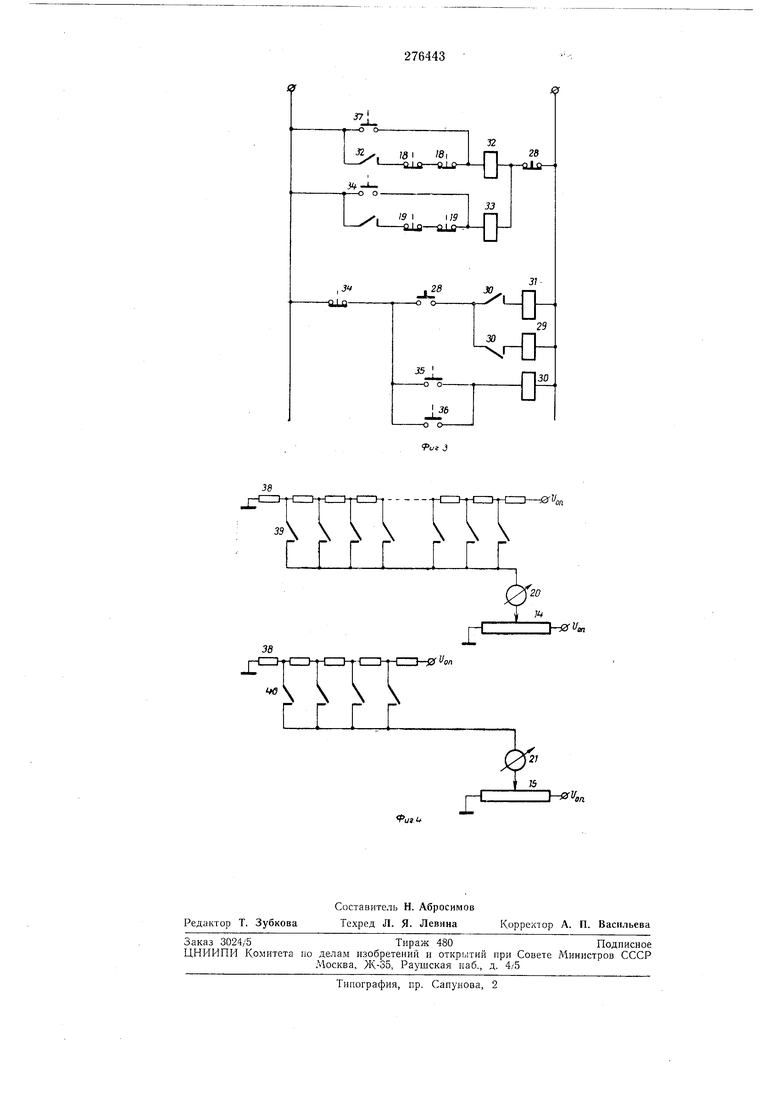
На фиг. 1 показано расположение оборудования в цехе; на фиг. 2 - схема системы контроля перемещения штыревого крана; на фиг. 3 - исполнительная схема системы контроля и на фиг. 4 - схема задатчика и сравнивающее устройство.
5 Над электролизерами с верхним подводом тока 1 располол ена ферма 2 щтыревого крана с тележкой крана 3, на которой укреплена щтанга для осуществления захвата штыря. На каждом электролизере щтыри 4 расположены одинаково относительно базового штыря 5. Упоры 6 фиксируют положение фермы относительно базового штыря. Ввиду возможного смещения ванн поперек корпуса упор 7 конечного выключателя тележки крана, фик5 сирующий полол :ение тележки крана относительно базового штыря, сделан подвижным. Колесо фермы 8 и колесо тележки 9 связаны через редукторы 10 к 11 с электромагнитными муфтами 12 и 13, которые, в свою ров 14 и 15. Пружины 16 и 17 предназначены для возврата движков потенциометров в исходное положение. Конечные выключатели 18 и 19 фиксируют крайние полоя ения движков потенциометров. В качестве сравнивающих устройств использованы показывающие милливольтметры 20 и 21. К милливольтметрам подключен адресный задатчик 22, на который подается напрян ение с источника опорного напряжения 23. Упор 7 конечного выключателя тележки крана укреплен на гайке 24, ходовой винт 25 которой через электромуфту 26 соединен с двигателем настройки 27 исходного положения тележки крана. Исполнительная схема включает кнопку 2S включения двигателя настройки, электромагнитные реле 29-33, конечный выключатель 34- тележки крана, конечные выключатели 35-36, фиксирующие крайние положения упора 7 на ходовом винте 25, конечный выключатель 37 фермы крана. Адресный задатчик состоит из эталонных сопротивлений 38 и тумблеров 39 и 40, с иомощью которых осуществляют выбор напряжения, соответствующего координатам требуемого штыря. Система контроля работает следующим образом. Оператор краиа обычным нутем подводит щтангу к базовому штырю 5 электролизера,. иа котором требуется переставить штыри. При этом исходное положение фермы краиа фиксируется с помощью упора 6 и конечного выключателя 37, установленного на ферме. При нажатии кнопки 28 реле 29 включает двигатель настройки 27, и упор 7 перемещается до тех пор, пока не сработает копечный выключатель 34. При этом для исключения влияния выбега двигателя настройки 27 одновременно с отключением питания двигателя настройки выключается электромагнитная муфта 26. Если двигатель 27 не отключится, то сработает конечный выключатель 35 или 36, реле 30 включит реле 31, которое ревер- 45 сирует двигатель 27. Упор 7 начнет перемещаться в обратном направлении до срабатывания выключателя 34; последний фиксирует исходное положение телел ки крана. При срабатывании конечных выключателей 50 34 и 37 реле 33 и 32 включают электромагнитные муфты 12 и 13, соединяя оси движков потенциометров 14 к 15 с редукторами 10 и //. Выбрав тумблером 40 нужный поперечный ряд, а тумблером 39 нулсный продольный ряд 55 (требуемый щтырь находится на пересечении рядов), оператор тем самым задает величины напряжений, снимаемых с делителей, соответствующие величине расстояний фермы и тележки краиа до выбранного штыря. При движении крана к штырю показания милливольтметров 20 и 21 будут пропорциональны разностям напряжений, снимаемых соответственно с потенциометра 14 и тумблера 39, потенциометра 15 и тумблера 40. Эти разности будут пропорциональны расстояниям фермы и тележки крана до выбранного штыря. Штыри, снятые с ванны, транспортируются за пределы зоны электролизера, ограниченной упорами (5 и 7. При повторных подходах крана к обслуживаемому электролизеру в момент проходов механизма мимо упоров сработают реле 32 и 33, включатся электромагнитные муфты 12 и 13, и начнется отсчет до вновь выбранного штыря. . При выходе крана за пределы зоны, ограниченной упорами с одной стороны, и расстояниями, зависящими от передаточных коэффициентов редукторов W и 11, концевые выключатели 18 и 19 выключат электромагнитные муфты 12 и 13, а возврата 16 и /7 вернут движки потенциометров 14 и 15 в исходное положение. Предмет изобретения 1. Система автоматического контроля перемещения транспортпого механизма, включающая датчики пути, адресный задатчик, устройства сравнения, отличающаяся тем, что, с целью контроля перемещения штыревого краиа, обслуживающего алюминиевые электролизеры, один из датчиков пути через редуктор связан с ходовым колесом фермы крана, а второй датчик пути через свой редуктор с ходовым колесом тележки крана, выходы датчиков пути поданы на отдельные сравнивающие устройства, в качестве которых использованы показывающие миллиамперметры, на вторые входы которых подано напрял ;ение адресного задатчика. 2.Система по п. 1, отличающаяся тем, что датчик выполнен в виде потенциометра, в котором ось связана с прул-;иной возврата потенциометра в начальное положение и с электромагнитной муфтой, обеспечивающей соединение оси движка с редуктором. 3.Система по п. 1, отличающаяся тем, что, с целью облегчения настройки исходного положения тележки краиа, подвилсный упор конечного выключателя тележки крана, расположенный на ферме крана, укреплен на гайке, ходовой винт которой через электромуфту соединен с двигателем настройки исходного положения тележки крана.
Л«;.7
u
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ЗАТЯЖКИ и ОСВОБОЖДЕНИЯ | 1966 |
|
SU185080A1 |
| Устройство для измерения в роторных экскаваторах толщины стружки | 1959 |
|
SU133412A1 |
| МАССОВЫЙ РАСХОДОМЕР | 1973 |
|
SU375487A1 |
| Энергетическая установка транспортного средства | 1987 |
|
SU1497075A1 |
| УСТРОЙСТВО для ИСПЫТАНИЙ ВЕРТОЛЕТОВ НА «ЗЕМНОЙ РЕЗОНАНС» | 1970 |
|
SU282719A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ КРАСИЛЬНОГО | 1967 |
|
SU190460A1 |
| ГРУЗОПОДЪЕМНЫЙ КРАН | 1968 |
|
SU206825A1 |
| Мостовой кран для обслуживания алюминиевых электролизеров | 1983 |
|
SU1148905A1 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ КОНСТРУКЦИЙ НА ПРОЧНОСТЬ | 1962 |
|
SU146655A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
34 11855
Г Г Г r г г г
за
r-C T4ZZHHIZ -t--CZHt-C H0
Р г
л
32
Q-r
I 5 П -iiia-JaJг-Д- H
j;JO
4
30 -{
30
20 7
г/„
г
:-«
Г
ui.t
