Изобретение относится к устройствам для механизации погрузочных работ, на транспорте, складах и промышленных предприятиях и предназначено для погрузки штучных грузов, преимущественно коробок или ящиков, в автомашины, контейнеры и железнодорожные составы.
Известны устройства для перегрузки штучных грузов, содержащие тележку со стойкой, подъемный механизм, подвижную вдоль стойки каретку, оборудованную горизонтальными направляющими для грузонесущей рамы и приводным механизмом, с помощью которого осуществляется выдвижение грузонесущей рамы. Однако эти устройства не обеспечивают укладку грузов в плотный щтабель, что требует затраты дополнительного ручного труда для выполнения перегрузочных работ.
Предлагаемое устройство отличается тем, что оно выполнено с приводным рольгангом, смонтированным на грузонесущей раме каретки. При этом привод роликов рольганга обеспечивает вращение их с та.кой скоростью, что вне зависимости от нанравления движения рамы груз, находящийся на рольганге, перемещается в ностоянном направлении. Это обеспечивает плотную укладку грузов в штабель.
ствующих с рейками каретки. При этом в кинематическую цепь привода между зубчатыми колесами с роликами включены обгонные муфты прямого и обрагного хода. Это обеспечивает вращение роликов и, следовательно, нодачу груза за счет работы механизма выдвижения грузонесущей рамы каретки.
Кроме того, для упрощения конструкции привода рольганг выполнен с цепными передачами для последовательного соединения роликов.
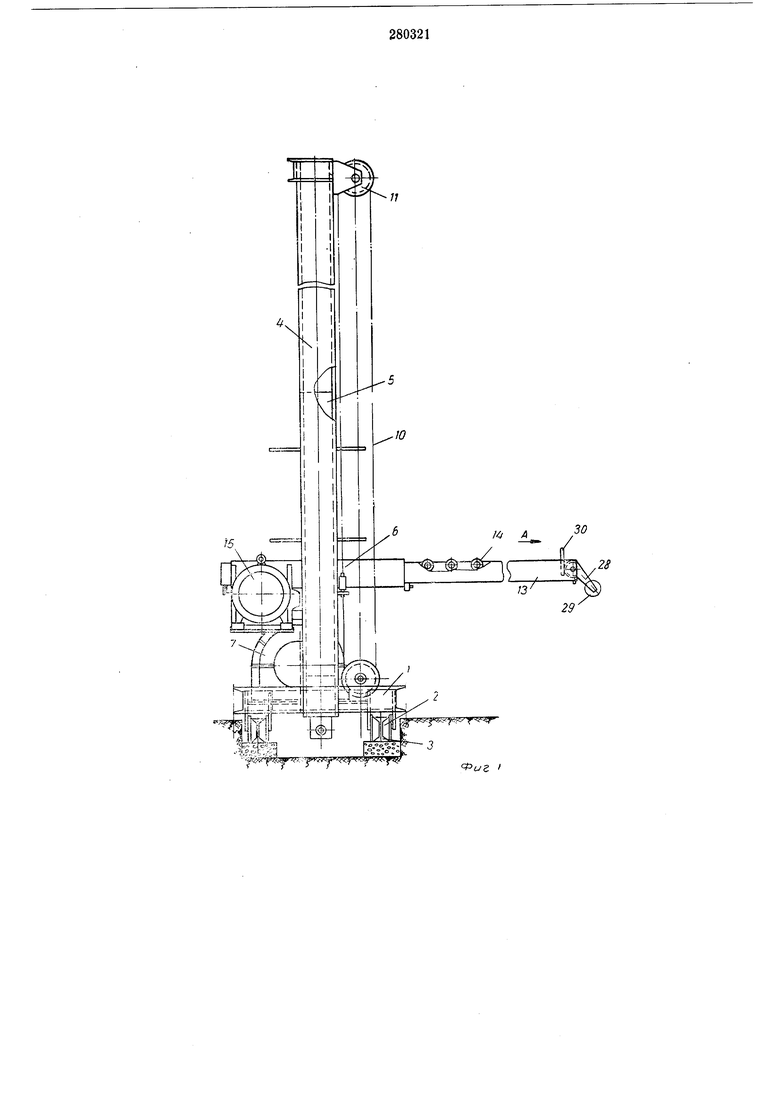
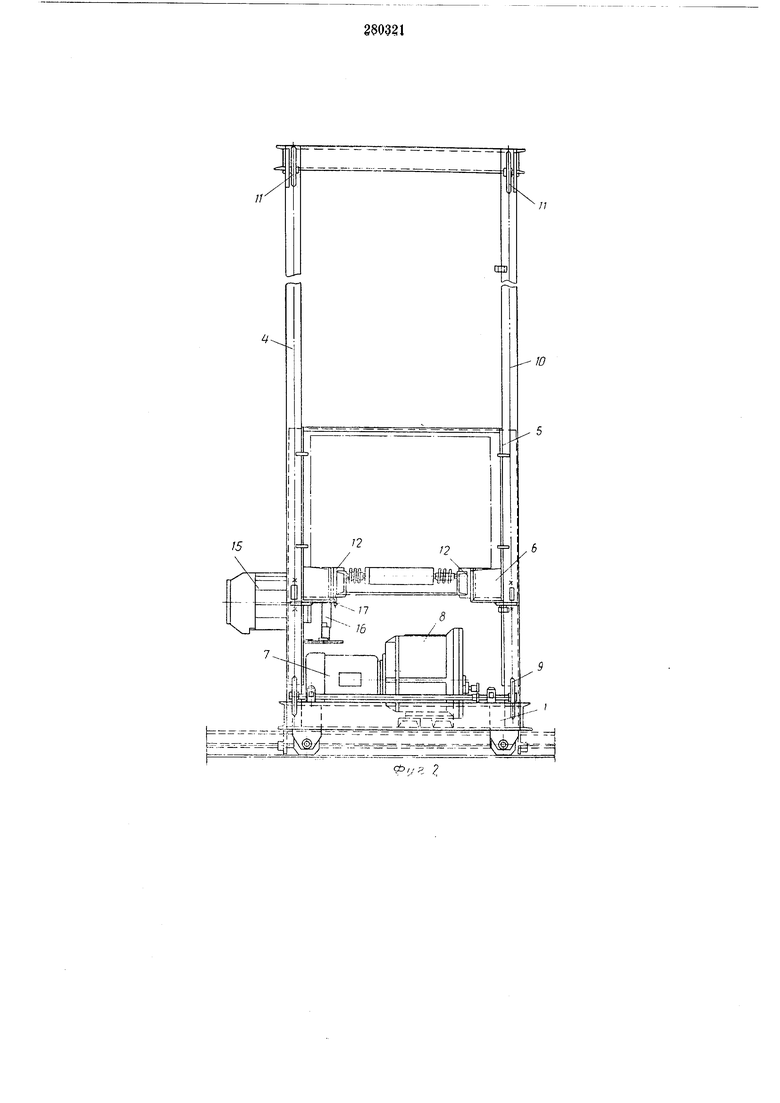
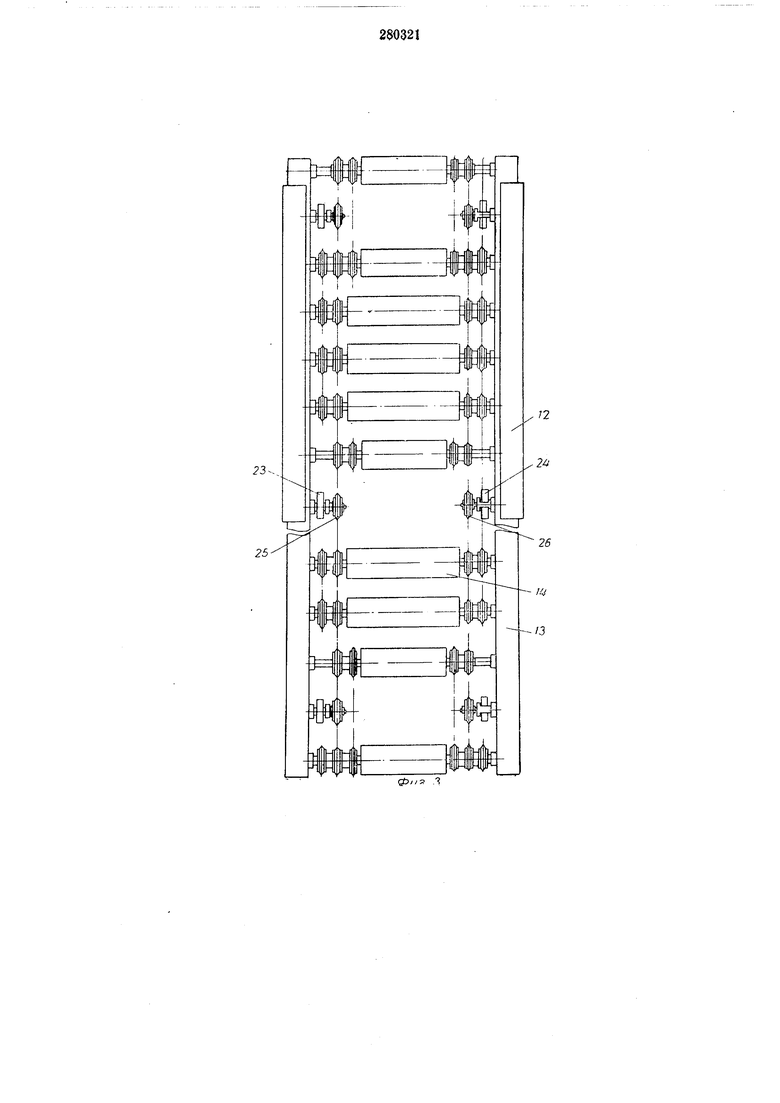
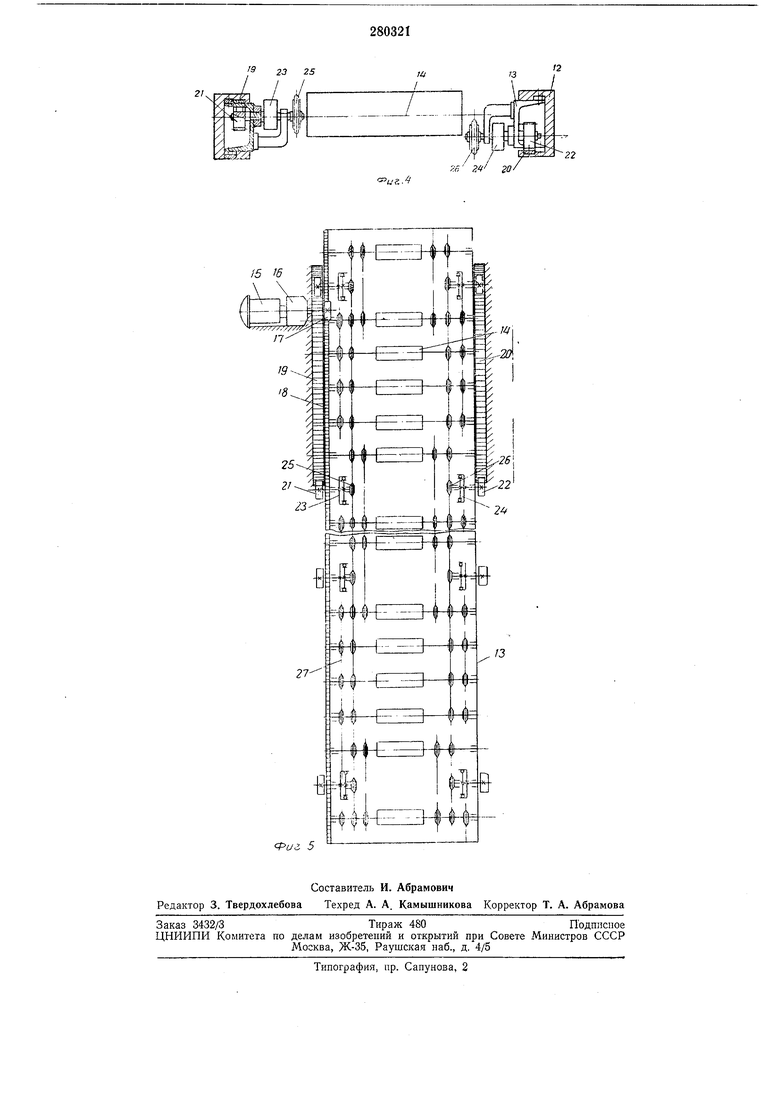
На фиг. 1 изображено предлагаемое устройство, вид сбоку; на фиг. 2 - то же, вид с торца; на фиг. 3 - грузонесущая рама с рольГангом; на фнг. 4 - узел привода рольганга; на фиг. 5 - кинематическая схема рольганга. Тележка 1 устройства смонтнрована на ходовых колесах 2, перекатывающнхся по стационарно установленным направляющим 3.
Иа раме тележки установлена стойка из двух направляющих 4 корытного сечения. Вдоль направляющих 4 перемещаются ползуны 5 каретки 6. Механизм подъема каретки 6 состоит из ириводного электродвигателя 7, редуктора 8, ведущих ценных звездочек 9, цепей 10 и отклоняющих звездочек //, смонтированных на головке стойки. Каретка 6 имеет направляющие 12 корытбалки 13 грузонесущей рамы. На балках 13 смонтированы ролики 14, образующие рольганг. Привод механизма выдвижения каретки включает в себя электродвигатель 15, редуктор 16 и зубчатое колесо 17, сцепляющееся с зубьями рейки 18, укрепленной вдоль одной из балок 13.
К направляющим 12 каретки прикреплены зубчатые рейки 19 и 20, взаимодействующие соответственно с зубчатыми колесами 21 и 22, смонтированными на балках 13. На валах колес 21 и 22 сидят обгонные муфты 23 н 24 в цепные звездочки 25 н 26. Последние с помощью приводных цепей 27 приводят во вращение ролики 14.
Обгонные муфты выполнены так, что когда одни муфты 23 обеспечивают привод роликов 14 при перемещении грузонесущей рамы в направлении стрелки А (см. фиг. 1), другие муфгы 24 - разомкнуты.
При обратном ходе грузонесущей рамы муфты 24 замкнуты, а муфты 23 разомкнуты. Так как зубчатые колеса 21 и 22 связаны с противопололшо размещенными зубчатыми рейками, то направление вращения роликов 14 остается неизменным, т. е. в сторону подачп груза в направле,нпи стрелки А.
Кинематические соотнощения элементов нривода рольганга подобрапы так, что при возвратном движении грузонесущей рамы окружная скорость на роликах 14 по своей величине превышает скорость перемещенИя рамы.
На головках балок 13 смонтированы кривошипы 28, несущие ролики 29 и соединенные поперечиной. Предусмотренные на этих кривошипах зубья сцеплены с зубьями опускного упора 30.
Для погрузки грузов, поступающих, например, по падающему рольгангу, тележка / смещается в горизонтальном направлении так, что грузонесущая рама подводится иод рольганг. Затем каретка 6 ноднимается, и ролики 14 подхватывают груз. Последующим включением механизма выдвижения балок 13 груз перемещают в направленни мащины. Одновременно груз получает дополнительное смещение за счет вращения роликов 14. После установки балок 13 в необходимое положение каретку 6 вновь опускают, причем ролики 29 кривощипа 28 вступают во взаимодействие с уже уложенным грузом или платформой кузова автомобиля. Кривошип 28 разворачивается, устанавливая упор 30. АА.еханизм выдвижения балок реверсируется. Так как направление вращения роликов 14 остается неизменным при возросщей скорости, то груз сталкивается
с грузонесущей рамы и плотно поджимается к уже уложенному грузу или стенке кузова автомобиля. При этом поперечипа, соединяющая кривощипы 28, выполняет функцию переходного звена.
Предмет изобретения
1.Устройство для нерегрузки штучных грузов, содержащее тележку со стойкой, нодъемный механизм, подвижную вдоль указанной стойки каретку, оборудованную горизонтальными нанравляюндпми для грузонесущей рамы и приводным механизмом выдвижения указанной рамы, отличающееся тем, что, с целью
обеспечения плотной укладки в штабель грузов, оно снабжено рольгапгом, смонтированным на грузонесугцей раме каретки с приводом роликов, обеспечивающим вращение их с такой скоростью, что вне зависимости от направления движения рамы груз, находящийся на рольганге, перемещается в постоянном направлении.
2.Устройство по п. 1, отличающееся тем, что, с целью обеспечения приведення роликов
во вращение с помощью механизма выдвижения рамы, привод рольганга выполнен в виде смонтированных на каретке реек и зубчатых колес, установленных на выдвижной раме, и взаимодействующих с указанными рейками,
а с обгонными муфтами прямого и обратного хода, встроенными между зубчатыми колесами и роликами.
3.Устройство по пп. 1 и 2, отличающееся тем, что, с целью упрощения конструкции
привода, рольганг выполнен с цепнымн передачами для последовательного соединения роликов.
..
iv
/
/;
/7
Ф//г
23,
25
72
дь//я Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Обмоточное устройство для скрепления грузов полимерной пленкой | 1990 |
|
SU1761602A1 |
| Устройство для передачи штучных грузов с одного конвейера на дрYгой | 1984 |
|
SU1244063A1 |
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Телескопический захват | 1987 |
|
SU1442471A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| ШТАБЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1970 |
|
SU283024A1 |
| Устройство для передачи штучных грузов | 1980 |
|
SU906856A1 |
| АГРЕГАТ ДЛЯ СБОРКИ И СВАРКИ БАЛОК КОРАБЕЛЬНОГО НАБОРА С ПОЛОТНИЩЕМ | 1971 |
|
SU295640A1 |
| УСТРОЙСТВО для РЕЗКИ листов из ЛЕНТЫ) | 1965 |
|
SU167737A1 |