(54) РЕГУЛЯТОР ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ УГЛЕДОБЫВАЮЩИМИ КОМБАЙНАМИ
Известны регуляторы для автоматического управления угледобывающими комбайнами, включающие радиоизотопный датчик пороца- - уголь, датчик обратной связи, усилитель и электрогидроблок.
Предложенный регулятор отличается от известных тем, что датчик обратной связи установлен на гидродомкрате, жестко связанном с корпусом машины и поджимающем датчик порода - уголь к почве пласта. В качестве датчика обратной связи применен радиоизотопный датчик с характеристикой, обратной характеристике рациоизотопного датчика порода - уголь, причем выходы обоих датчиков через нормализатор подсоединены к общему интегратору и далее к схеме сравнения сигнала с номинальной установкой. Это позволяет реализовать систему, инвариантную к возмущающим воздействиям, и повышает надежность работы аппаратуры.
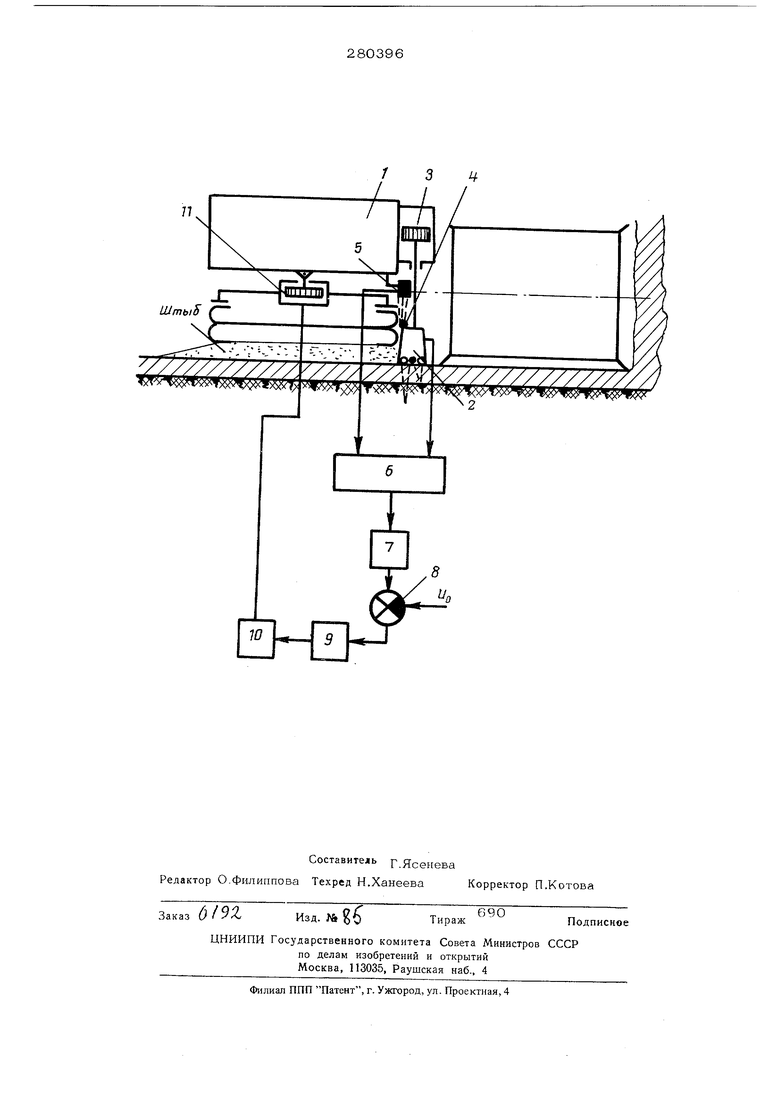
На чертеже изображен регулятор для автоматического управления комбайнами и блок-схема системы регулирования.
2 порода - уголь, гицродомкрат 3 датчика порода - уголь, источник излучения 4 дат чика обратной связи, датчик обратной связи (приемник излучения) 5, нормализатор 6 импульсов, интегратор 7, схему сравнения 8, усилитель 9, электрогидроклапа- ны 10 и гидродомкрат 11 для подъема и опускания комбайна.
На угольном комбайне 1, управляемом
в профильной плоскости пласта перемещением корпуса мащины вместе со щнеком (типа 2К-52), укрепляется датчик 2 порода - уголь таким образом, что он следует по старой дороге в пространстве
между шнеком и забойным конвейером.
Датчик 2 прижимается к почве пласта гидродомкратом 3, жестко связанным с корпусом машины. На датчике 2 нанесена радиоактивная метка (например, источник
ТИ---) с активностью около 0,1 мг-экв радия, т. е. не требующей согласно Санитарным правилам № 333-60 принятия специальных мер защиты. Приемник излучения 5 крепится жестко к корпусу мащиявляются основными элементами цатчика обратной связи, т. е. датчиком положения мащины относительно подошвы выработки. Любое изменение положения машины относительно выдвижной части датчика поро да- уголь независимо от вызвавшей его причины приводит к изменению интенсивности излучения, регистрируемой датчиком обратной связи. Импульсы с датчика 2 и приемника излучения 5 поступают на общий нормализатор 6, затем преобразуются в напряжение постоянного тока интегратором 7,Сигнал, снимаемый с интегратора, срав нивается с установкой на схеме сравнения 8.Разностный сигнал усиливается усилителем 9 и поступает на вход блока элект- рогидроклапанов 10, управляющих работой гидродомкрата 11, осуществляющего изменение положения мащины в. профильной плоскости пласта. Характеристика датчика обратной связи Up-f(H) т. е, зависимость его выходного сигнала от расстояния между радиоактивной меткой и приемником излучения 5, подбирается таким образом, чтобы она являлась зеркальным отображением характеристики датчика порода уголь ij -(-i. Это достигается изменением положения приемника относительно метки и введением дополн Пельных поглощающих экранов на пути пучка излучения. Их результирующая является прямой, параллельной оси абцисс т. е. Up-COnst. Сигнал рассогласования в системе регулирования появляется на выходе схемы сравнения 8 при нарушении равенства. Регулятор настраивается по градуиро- вочным кривым датчиков 2 и 5.Номинальным положением является , при регулятора равна котором уставка сумме сигнала UD с датчика обратной связи, соответствующего расположению нижних зубков шнека и подошвы конвейера на одной горизонтальной плоской сти, и сигнала } с датчика порода - уголь, соответствующего требуемой толщине угольной пачки, т. е, U,-U + UT ном Система регулирования работает следующим образом. При появлении возмуш.ающего возде; ствия, например подштыбовки конвейера, вызывающей смещение машины относителЬ но датчика порода - уголь на некоторую высоту Д Н, Eia выходе схемы 8 появляется рассогласование Л U . Исполнительный механизм опускает мащину до тех пор, пока это рассогласование не будет отработано. Равновесие в системе наступает, когда щнек опустится на величину, равную высоте щтыбовой подущки. Если под следующими секциями конвейера щты- бовой подущки не окажется, на выходе схе мы сравнения вновь появится сигнал рассогласования, но теперь уже противоположной полярности, и система придет к первоначально заданному условию равновесия. Аналогичным будет поведение системы и в случае отклонения угольной пачки под датчиком уголь порода от номинального значения. Таким образом, если в ранее применяющихся системах управления комбайном с датчиком порода - уголь, следующим по старой дороге, возмущения, связанные с изменением положения мащины, фиксировались лишь после того, как они отражались в отклонении угольнойпачки от номинальной, т. е. на следующем цикле выемки, то в данном случае они отрабатываются заранее, не отражаясь на толщине угольной пачки. Рассмотревная система обладает свойтвом компенсации возмущающих воздейстий, причем за счет использовании датчиков одинакового принципа действия (радиоизо- опных) структура системы остается преельно поостой. изоб-ретени я 1.Регулятор для автоматического управления угледобывающими комбайнами, включающий радиоизотопный датчик порода - уголь, датчик обратной связи, усилитель, электрогидроблок и гидродомкраты, о т- л и чаю щ и и с я тем, что, с целью реализации скстемь;, инвариантной к возмущающим воздействиям,, датчик обратной связи установлен на гидродомкрате, жестко связанном с корпусом машины и поджимающим датчик порода - уголь к почве пласта, 2.Регулятор пэ п. 1, о т л и ч а ю щ и и с ,я тем, что, с целью повышения надежности работы аппаратуры, в качестве датчика обратной связи применен радиоизо- топный датчик с характеристикой, обратной характеристике радиэизотопного датчика порода уголь, причем выходы обоих датчиков через нормализатор подсоединены к общему интегратору и далее к схеме сравнения сигнала с номинальной установкой.
/////// ///////.
5 Т о Тй945 Ц фЧ Я 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| РЕГУЛЯТОР-КОПИР ДЛЯ ВЫЕМОЧНЫХ МАШИН | 1969 |
|
SU252987A1 |
| Способ автоматического управления положением режущего органа угледобыващей машины | 1972 |
|
SU466328A1 |
| Устройство контроля границы порода-уголь пласта для горной машины,на исполнительных органах которой установлены режущие зубки | 1982 |
|
SU1046505A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ УГЛЕДОБЫВАЮЩИХ КОМБАЙНОВ | 1971 |
|
SU310044A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Устройство автоматического управления угледобывающей машиной в профиле пласта | 1978 |
|
SU964138A2 |
| Способ контроля скрытой границы порода-уголь | 1980 |
|
SU911030A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ УГЛЕДОБЫВАЮЩИХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2130546C1 |