Известен автомат для завертывания шпилек, содержащий смонтированный на станине стол с силовым приводом, несущий шпиндели с .патронами, приспособление для установки детали, бункер, .механизмы ориентации и перемещения шпилек и механизм подачи шлилек в рабочую зону типа поворотной механической руки с захватами, которые закреплены на конце Г-образного рычага, установленного на ее поворотной оси.
Извест1ный автомат не завертывает шпильки малой длины, поскольку захваты не могут перемещаться в плоскости, перпендикулярной осям шпилек, и не могут быть выведены из рабочей зоны в процессе завертывания. Кроме того, механизм подачи шпилек имеет индивидуальный привод, что удорожает конструкцию и усложнаяет систему управления автоматом.
В предлагаемом автомате механизм подачи шпилек связан со столом и снабжен ограничителем поступательного перемещения, который выполнен в виде цилиндрической пружины, обхватывающей поворотную ось механизма и взаимодействующей с жестко закрепленным на корпусе стола упором. Это расщиряеттехнологические возможности автомата. 3|ахваты могут быть выполнены в виде клещей со взаимно подпружиненными рычагами, снабженными зажимными губками; одна из них выполнена плоской, а другая - в виде установочной призмы, опорные плоскости которой параллельны поворотной оси.
Свободные концы клещей могут быть размещены в обхватывающей их по боковым поверхностям обойме, снабженной винтом для регулировки положения клещей. Автомат в таком исполнении -позволяет повысить точность ориентации шпилек относительно детали и завертывать шпильки различных типоразмеров.
Кроме того, автомат может быть выполнен
МНОГОПОЗИЦИОВНЫМ.
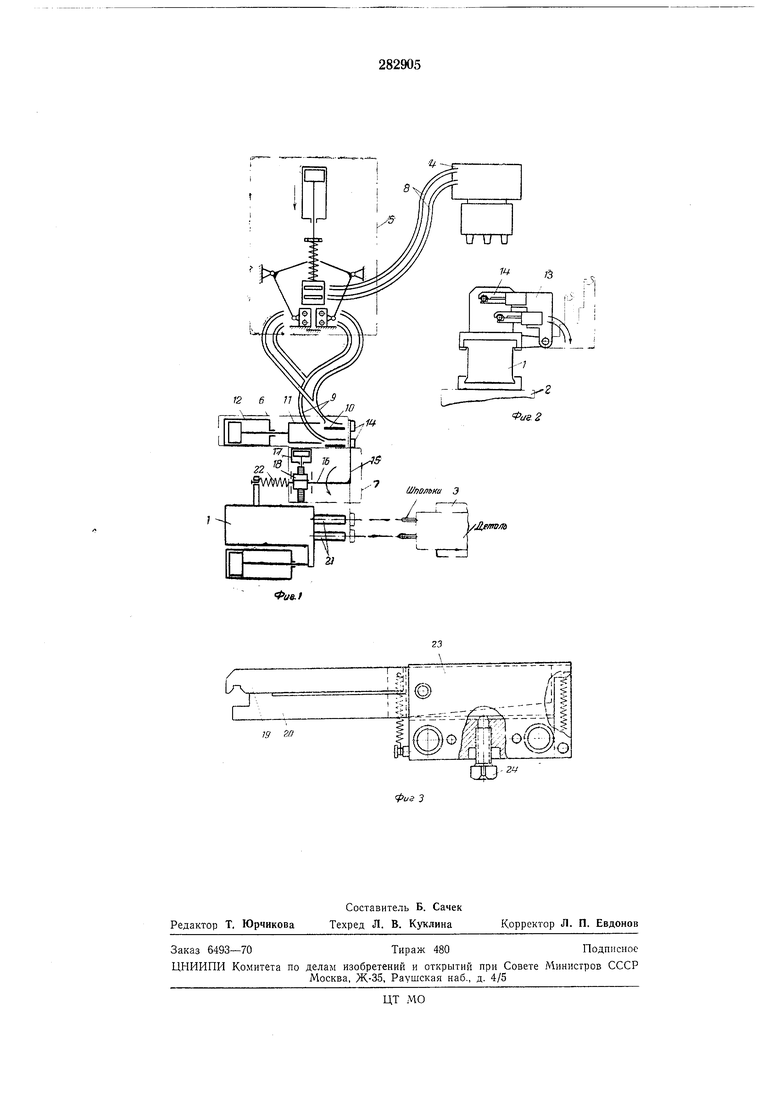
На фиг. 1 изображена кинематическая схема группы механизмов, обеспечивающих завертывание двух шпилек; на фиг. 2 - механическая поворотная рука; на фиг. 3 - обойма с захватами.
Автомат содержит стол / с силовым приводом, смонтированный на станине 2, и приспособление 3 для установки детали. Автомат снабжен бункером 4, механизмом 5 ориентации шпилек, механизмом 6 перемещения шпплек и механизмом 7 подачи шпилек в рабочую зону. Бункер с помощью гравитационных лотков 8 связан с механизмом ориентации шпилек, который с помощью каналов 9 соединен с механизмами перемещения и подачи шпилек.
Механизм подачи Шпилек в рабочую зону выполнен в виде поворотной механической руки 13 с захватами 14, закрепленными на конце Г-образного рычага 15. Рычаг уста-новлен на оси 16 и имеет привод углового перемещения, выполненный в виде силового цилиндра 17 и реечной передачи 18. Захваты представляют собой клещи со взаимно подпружиненными рычагами, снабжепными зажимиыми губками 19 и 2G; одна из них выполнена плоской, а другая - в виде установочной призмы, опорные плоскости которой параллельны оси 16.
Автомат работает следующим образом.
Шлильки из бункера по гравитационным лоткам поступают к механизму 5, откуда в ориентированном положении подаются по каналам 9 на призмы механизма перемещения шпилек в меха гическую руку. С помощью толкателей шпильки попадают в клещи захватов и зажимаются ими. Под действием цилиндра 17 с помощью реечной передачи механическая рука Поворачивается и переносит ш-пильки к завертывающим патронам 21. Далее под действием силового привода стол перемещается, осуществляя подачу щпилек к резьбовым отверстиям детали. По достижении цгпильками резьбовых отверстий поступательное перемещение механической руки прекращается, а дальнейшее перемещение стола, необходимое для ввертывания ш:пилек, вызывает сжатие пружины 22. После начала завертывания шпильки лри угловом перемещеиии механической руки клещи легко освобождают шпильку, поскольку губка рычага, совершающего поворот по меньшему радиусу, выполнена плоской. Свободные концы клещей размещены в обхватывающей их по боковым поверхностям обойме 23, снабженной винтом 24 для регулировки положения клещей.
Предмет изобретения
1.Автомат для завертывания шлилек, -содержащ,ий смонгированный на станине стол с силовым приводом, -несущий Шпиндели с
патронами, приспособление для установки детали, бункер, механизмы ориентации и перемещения шпилек и механизм подачи Щпилек в рабочую зону тина новоротной механической руки с захватами, закрепленными на
конце Г-образного рычага, установленного на ее поворотной оси, отличающийся тем, что, с целью расширения технологических возможностей, механизм подачи шпилек связан со столом и снабжен ограничителем поступательного перемещения, выполненным в виде цилиндрической пружины, обхватывающ,ей поворотную ось и взаимодействующей с жестко закрепленным на корпусе стола упором.
2.Автомат по п. 1, отличающийся тем, что захваты выполнены в виде клещей со взаимно подпружнненными рычагами, снабженными зажимными губками, одна из которых выполнена плоской, а другая - в виде установочной призмы, опорные плоскости которой параллельны поворотной оси.
3.Автомат по пп. 1 и 2, отличающийся тем, что, с целью повышения точности ориентации шпилек относительно детали, свободные концы клещей размещены в обхватывающей их
по боковым поверхностям обойме, снаблсенной винтом для регулировки положения клещей.
4.Автомат но пп. 1-3, отличающийся тем, что он выполнен многопозиционным.
Mf/m/K
ПГ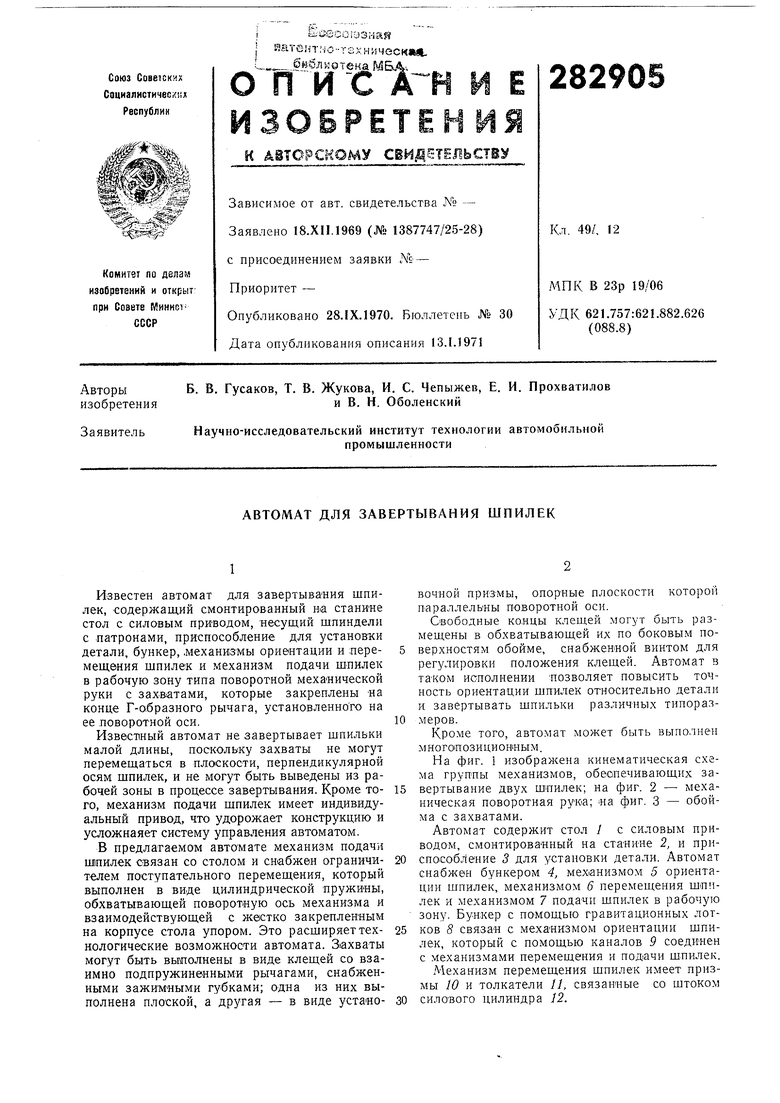

| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПОДАЧИ ДЕТАЛЕЙ ТИПА В.4ЛИКОВ | 1970 |
|
SU284574A1 |
| АВТОМАТ ДЛЯ ЗАВЕРТЫВАНИЯ ШПИЛЕК | 1973 |
|
SU433007A1 |
| Автомат для завертывания шпилек | 1979 |
|
SU810426A1 |
| СБОРКИ РЕГУЛЯТОРА НАТЯЖЕНИЯ ВЕРХНЕЙ НИТИ ШВЕЙНОЙ МАШИНЫ | 1972 |
|
SU352739A1 |
| Автомат для завинчивания шпилек | 1985 |
|
SU1355438A1 |
| Патрон для завертывания шпилек | 1990 |
|
SU1738632A1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Сборочная машина | 1975 |
|
SU557905A1 |
| Способ завертывания шпилек | 1979 |
|
SU887114A1 |
| Автомат для изготовления деталей из проволоки | 1985 |
|
SU1392733A1 |
- 2Л
