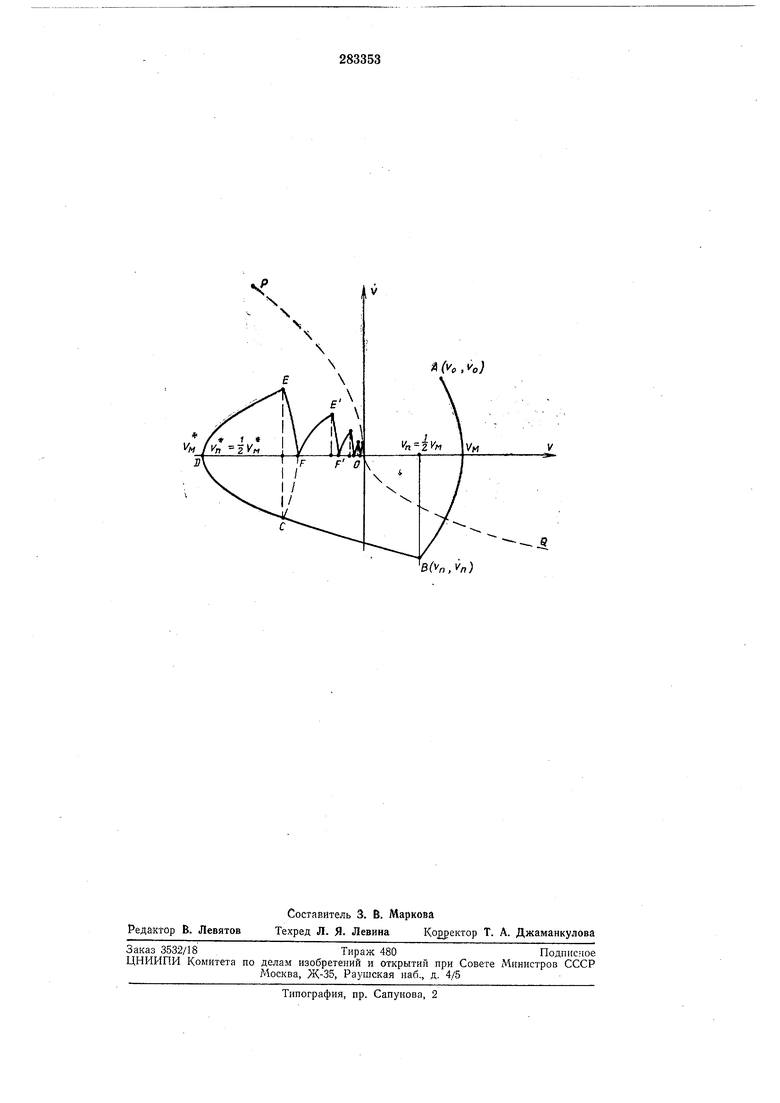
1 Изобретение может быть использовано для стабилизации, например, релейных систем управления инерционным объектом в случае, когда на объект действует постоянное возмущающее воздействие. Предлагаемый способ отличается от известного тем, что корректирующий сигнал формируют в виде разности между действительным выходным сигналом системы и половиной его экстремального значения, которое, в свою очередь, формируют в запоминающем устройстве в момент равенства нулю разности текущего значения выходного сигнала и его же, задержанного на определенное время. При этом повыщается точность управлепия и не требуется иметь информации о скорости движения самого объекта. Сущность способа поясняется чертежом. Известно, что для получения оптимальной по быстродействию системы, описываемой уравнениями вида: при6 о (Л «+Л1в) при . а; v - выходная координата объекта; равляющая функция вляющая функция U должна иметь вид 1 .2 (OTO + IB) при w о 2 (/«о - ZB) при у о где /«о / f фазовом портрете, соответствующем уравнений (I), оптимальные линии чения имеют вид парабол, описываеедующими уравнениями: V (линия переключения ОР) 2 (WQ + тв) 1 v (линия переключения OQ) (/По - WB) функции и могут быть легко определены с помощью счетно-решающего прибора. При этом объект регулирования приходит в установившееся состояние (при любых иенулевых начальных условиях) за минимальное время при одном переключении релейного управляющего устройства. Однако известно, что получение информации о величине и зиаке скорости объекта связано с большими трудностями, а иногда и не представляется возможным, а измерение MB практически невозможно. Сформируем систему регулирования таким образом, чтобы переключение управляющей функции и происходило тогда, когда текущее значение отклонения v станет равным - t maxПри этом,- никакой.ин(|)орнации о и не используется, а. только требуется запомнить значение Lm.ix- Рассмотрим фазовый портрет системы в этом случае. Пусть движение в системе начииается из точки Л с координатами (о, УО). Тогда от точки Л (0(,, ио)До точки В (Од Уд) движение осуществляется с ускорением - (т -Ь /п ). В точке -у„„ происходит переключение управлеиия и от точки В до точки Е движение осуществляется с ускорением + («о - )- В точке fo: снова происходит переключение управления, и осуществляется с ускорением -(/Яо - ) ДО точки С, где происходит переключение управления на обратное и т. д. В этом случае в системе устанавливаются несимхметричные автоколебания относительно значения У) характеризуемые предельным циклом CDEF, параметры которого существеино зависят от начальных ухловий () и величины М. Если запоминающее устройство, задачей которого является запоминание fniax прекращает запоминание не по сигналу v (t) О, а при значении v ( (t - т) О, где т - время запаздывания, определяемое требуемой точностью стабилизации, то предельный цикл CDEF в системе исчезает. В этом случае в момент перехода v (t) через любое экстремальное значение происходит сброс экстремума, который запоминался ранее. Тогда движение от точки Л до точки F происходит подобно описанному. В момент про хождения точки г (О- ( - т) предыдущее значение v в запоминающем устШал ройстве стирается и записывается новое значение .При этом, поскольку сигнал с запоминающего устройства равен нулю (в момент прохождения точки /), переключается управление с -т на , и движение осуществляется до точки Е. В точке F опять сбрасывается VmaKF, запоминается Ущах/ и т. д. Таким образом в системе устанавливается скользящий режим, при котором изображающая точка пе|ремещается в начало координат. Это способствует приходу объекта регулирования в устойчивое состояние. Предмет изобретения Способ стабилизации системы управления инерционным объектом с помощью нелинейной коррекции, отличающийся тем, что, с целью упрощения и повышения точности управления, -корректирующий сигнал формируют в виде разности между действительным выходным сигналом системы и половиной его экстремального значения, которое, в свою очередь, формируют в запоминающем устройстве в момент равенства нулю разности текущего значения выходного сигнала и его же, задержанного на определенное время.
В(УП,П}
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU435500A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| Трехпозиционный регулятор | 1984 |
|
SU1259208A1 |
| СПОСОБ ДИСКРЕТНОГО ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ | 1991 |
|
RU2015522C1 |
| Система оптимального управленияОб'ЕКТАМи ВТОРОгО пОРядКА | 1979 |
|
SU805250A1 |
| Система управления | 1977 |
|
SU741231A1 |
| ПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПОСТРОЕНИЯ АВТОКОЛЕБАТЕЛЬНЫХ САМОНАСТРАИВАЮЩИХСЯ СИСТЕМ | 1992 |
|
RU2032925C1 |
| Способ управления | 1975 |
|
SU805247A1 |
| Способ управления объектом | 1981 |
|
SU964573A2 |
| Устройство для моделирования оптимальной системы управления | 1985 |
|
SU1288729A1 |