Известны (например, по авт. св. Л 179576 кл. 49а, 3601) механизмы доворота и точного углового фиксирования вращаЕОщегося вала, снабженные гидроприводом, осуществляющим плавный доворот. Кинематическая цепь такн.х механизмов может содержать копир, с которым взаи.модействует ролик, приводи.мый от гидропривода.
Предложенный механизм доворота и точного углового фиксирования вращающегося вала отличается от известных тем, что копирпая пара включает в себя рычаг, замкнутый на копир с возможностью иоворота, снабженный скосами, один из которых является нанравляющнм для ролика, а другой - дополняюндим рабочий профиль копира. Приводной ролик выиолнеп подвижным в двух иаправлениях, а копир имеет винтовой профиль.
Шаг винтового профиля копира выполнен переменным, а приводной ролик укреплен в подвижном по направляющим ползуне ,снабженном укороченной рейкой, поочередно взаи.модействующей с нриводнымн щестерн я М и.
Такое конструктивное выполненпе механнзма довэрота и точного углового фиксирования позволяет повысить падежность копирной пары, увеличить точность, сн 1зить динамические нагрузки, возникающие в ием при фиксации, сокрагить время, необходимое для останова.
отличается иростотой по сравнению с конструкциями, нредназначенными для этой же цели.
На фиг. 1 изображен предложенный мохаиизм, продольный разрез; па фиг. 2 - вид по стрелке А па фиг. 1; на фиг. 3 - схема взаимодействия ролика с копиром.
Ведущая центральная щестерня / зацепляется колесами 2 и 3, взаимодействующими с рейкой 4, закрепленной на ползуне 5, который перемещается по направляющим 6 и на котором на осн 7 установлен ролик 8, взанмодействующий с копиром 9, смонтированным на барабане 10 посредством щпонки (на чертеже не указана).
Па оси 11 копира установлен рычаг 12, имеющий боковой и верхиий скосы. Рычаг 12 поджат пружпной 13, через плунжер 14 связанной с упором 15. Барабан 10 посредством зубчатых щестерен 16-19, пмеющих такое же передаточное отнощение. что i колеса 20 и 21, связан с доворачиваемым валом 22.
Работает механизм следующим образом.
После останова станка вращающийся вал 22 доворачивают и устанавливают в определенном положении. 6т гидромотора (на чертеже не показан) вращение передается на шестерню 1, находящуюся в зацеплении с двумя ведомыми зубчатыми колесами 2 и 3, которые последовательно входят в зацепление с рейко 4, установленной в ползуне 5, который начинает перемещаться влево по направляющей 6 вместе с роликом 8 до соприкосновения с рабочей поверхностью копира 9. Так как копир 9 имеет винтовой профиль, ролик 5 8, входя с ним в зацепление, начинает его иоворачивать вместе с барабаном 10, кинематически связанным шестернями 16-21 с вращающимся валом 22, требующим доворота до определенного положения.Ю При этом могут быть следующие случаи доворота. Ролик 8 входит непосредственно в соприкосновенне с рабочим профилем копира 9, выполненным в виде замкнутой винтовой поверх- 15 ности. Под действием ролика 8 копир 9 начинает иоворачиваться в нанравлении по стрелке Б (фиг. 3). Копир будет поворачиваться не положедо тех пор, пока ролик ние а, указанное на фиг. 3. При повороте ба- 20 рабана 10 вращение через зубчатые щестерни 16-21 передается па вращающийся вал 22, требующий доворота и фиксации в определенном положении. Ролик iS упирается в боковой скос рычага 25 12 (см. ноложение б на фиг. 3). Вследствие того, что боковой скос рычага 12 выполнен с тем же углом, что и рабочий профиль копира 9, ролик 8 начинает вращать барабан в том же нанравлении, что и в случае, упомя- 30 нутом выще. Доворачивается вал 22 так же, как описано выще. При отсутствии рычага 12 ролик 8 уинрался бы в верщину профиля копира 9 и доворот в этом случае был бы невоз(Можен, т. е. механизм был бы заиерт на 35 «мертвую точку. Если ролик 8 расположен нанротив вершины рычага 12 (см. положение в на фиг. 3), то ролик наезжает на верхний сков. Рычаг 12 иод действием ролика 8 начинает 40 поворачиваться на оси 11, преодолевая усилие пружины 13, которая упирается через плунжер 14 в упор 15, установленный на копире 9. Ролик 8 проходит над рычагом 12 и перемещается до соприкосновения с рабочим профилем коиира 9 (см. положение г па фиг. 3). В результате воздействия ролика В на копир 9 последний начинает поворачиваться в направлении, указанном стрелкой В на фиг. 3, вызывая через день щестерен 16-21 поворот вала 22 в требуемое положение. Предмет изобретения 1. Механизм доворота и точного углового фиксирования вращающегося вала, гидропривод которого вводит через систему щестерен подви кный ролик в зацепление с копиром, осуществляющим движение доворота, отличающийся тем, что, с целью иовыщения надежности копирной пары, носледияя включает в себя рычаг, замкнутый на копир с возможностью поворота, снабженный скосамн, один из которых является направляющим для ролика, а другой - дополняющим рабочий профиль копира. 2. Механизм по п. 1, отличающийся тем, что, с целью сокращения времени па останов, приводной ролик выиолнен подвижным в двух направлениях, а профиль копира - винтовым. 3. Механизм по н. 2, отличающийся тем, что, с целью повыщения точности останова с минимальными динамическими нагрузками, щаг винтового профиля копира выполнен неременным. 4. Механизм но п. 1, отличающийся тем, что приводной ролик укреплен в подвижном но направляющим ползуне, снабженном рейкой, поочередно взаимодействующей с приводнылш шестернями.
20
Фиг I
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВОЛБВЕРНАЯ ГОЛОВКА | 1969 |
|
SU234106A1 |
| Устройство для перемещения и ориентирования штучных заготовок | 1987 |
|
SU1433588A1 |
| Г. М. РЫБКИН и В. Т. ЧиликовВсесоюзный научно-исследовательский инструментальный институт | 1970 |
|
SU282010A1 |
| СЕСОЮЗНАЯ ( П/:ТОнНО"ТЕ;и;;^|Е;:кдя1a:--Tc!J!HO i Ff{A | 1972 |
|
SU329912A1 |
| ПОЛУАВТОМАТ ДЛЯ ОБРАБОТКИ ПО КОНТУРУ ПРОФИЛИРОВАННЫХ ПОДОШВ | 1968 |
|
SU217232A1 |
| Автомат навивки многорядных спиралей из капиллярных труб | 1987 |
|
SU1555018A1 |
| Станок для точки кардной гарнитуры шляпок | 1954 |
|
SU100815A1 |
| Автомат для изготовления двухветвевых пружин | 1973 |
|
SU484036A1 |
| ГИДРОФИЦИРОВАННЫЙ СТАНОК ДЛЯ ЗАТОЧКИ ПРОТЯЖЕК | 1971 |
|
SU310783A1 |
| Револьверная головка | 1974 |
|
SU531661A1 |
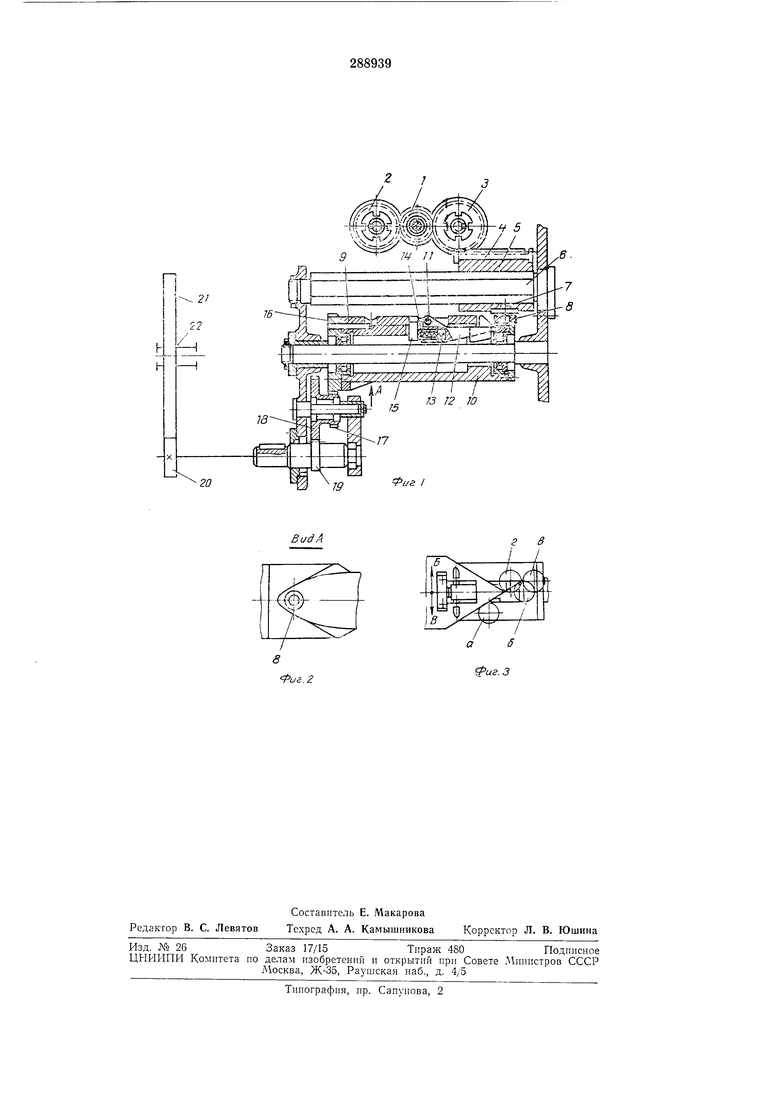
ВидА
Фиг. 2
