Фильтр предназначен для повышения помехозащищенности систем автоматического управления.
Известны нелинейные для систем автоматического управления, содержащие усилители, схему сравнения и интегратор. Однако наличие нелинейных характеристик в структуре систем автоматического управления приводит к зависимости их динамических свойств от характера входных воздействий. Особенно выражена такая зависимость при наличии во входном сигнале различного рода помех. При значительных уровнях помех нарушается устойчивость систем управления.
Применение линейных фильтров не позволяет значительно ослабить влияние помех на нрохождение полезного сигнала, так как частоты полезного сигнала и сигнала помехи существенно не отличаются.
Целью изобретения является создание устройства для выделения полезного сигнала на фоне помех в условиях, когда частота помехи незначительно отличается от частоты полезного сигнала. Причем характеристики такого устройства должны зависеть от уровня помех.
Цель достигается тем, что устройство содержит нелинейное звено типа «ограничение, вход которого подключен к выходу схемы сравнения, а выход - ко в.ходу интегратора.
Фильтр построен таким образом, что постоянная времени фильтра зависит от коэффициента передачи нелинейного звена, ноэтому характеристики фильтра зависят от характер а входных сигналов.
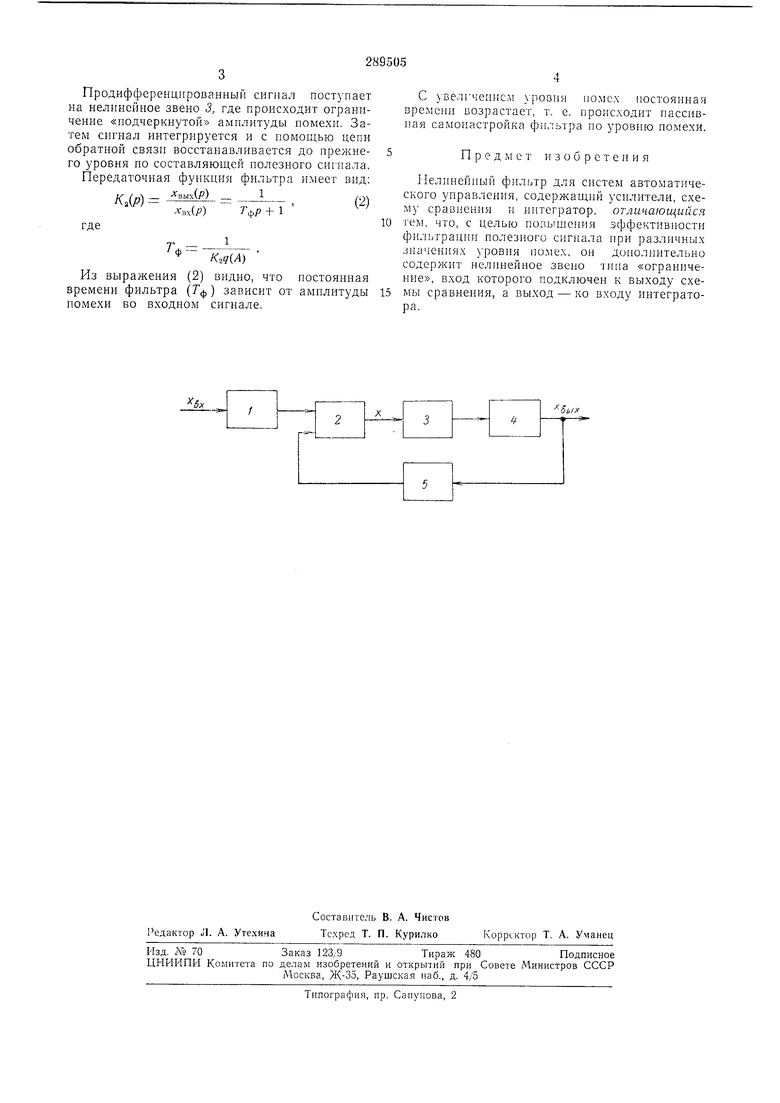
Па чертеже прпведена структурная схема нелинейного фильтра.
Он содержит ус лптель 1 с коэффициентом усиления /Сь схему сразпення 2, нелинейное звено 3 тнпа «ограннченне. интегратор 4, усилптель 5 с коэффициентом уснления /(з, включенный в цепь отрицательной обратной связи.
Входной сигнал, содерл ащий помеху, на выходе схемы сравнения дифференцируется, чем обеспечивается «подчеркивание (усиление) псмехн. Передаточная функция рассматриваемого устройства для цепи равна
(1)
К.(р)
(Р)7-ор + 1
где
1
Т,
2 -
К,д(А)
K,q(A)
q(A) -гармонический коэффициент иередачи нелинейного звена.
При Ki передаточная функция (1) соответствует дифференцирующему устройству, так как . При этом постоянные времени являются функциями от амплптуды входного сигнала. Продифференцированный сигнал поступает на нелинейное звено 3, где происходит ограничение «подчеркнутой амплитуды помехи. Затем сигнал интегрируется и с помощью цепи обратной связи восстанавливается до прежнего уровня по составляющей полезного сигнала. Передаточная функция фильтра имеет вид; -УвыхУР) ti К,(р} Л-вх(у5) ГфЯ -Ц Из выражения (2) видно, что постоянная времени фильтра (7ф) зависит от амплитуды помехи во входном сигнале. С уселгчепиелг -ровня помех постоянная времени возрастает, т. е. происходит пассивпая самонастройка фильтра по уровню помехи. Предмет изобретения Нелинейный фильтр для систем автоматического управления, содержащий усилители, схему сравнения и интегратор, отличающийся тем, что, с целью повышения эффективности фильтрацгп полезного сигнала при различных значениях уровня помех, он дополнительно содержит нелинейное звено тина «ограничение, вход которого подключен к выходу схемы сравнения, а выход - ко входу интегратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный фильтр | 1984 |
|
SU1233101A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
| Дифференцирующее устройство с переменной структурой | 1975 |
|
SU559248A1 |
| ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1971 |
|
SU307394A1 |
| УПРАВЛЯЕМЫЙ ГЕНЕРАТОР КВАДРАТУРНЫХ СИГНАЛОВ | 2014 |
|
RU2551824C1 |
| БЛОК ПРЕДВАРЕНИЯ С ФИЛЬТРОМ ПОНИЖЕНИЯ ПОМЕХ | 1994 |
|
RU2079883C1 |
| Фильтр для систем автоматического регулирования | 1978 |
|
SU746400A1 |
| Дифференцирующее устройство | 1978 |
|
SU729594A1 |
| ДИФФЕРЕНЦИРУЮЩЕЕ УСТРОЙСТВО | 1968 |
|
SU219909A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
л
-(5i/x
