Изобретение относится к области аналоговой вычислительной техники и может оыть использовано при моделировании системы с асинхронными двигателями.
Известно, что механическая и пусковая характерпстики асинхронного двигателя зависят от изменений частоты и напряжения на двигателе, величина которых определяется активным и реактивным током самого двигателя и характеристиками сети питания с генератором, что особенно проявляется в процессах пуска при соизмеримых мош.ностях двигателя и генератора.
известные устройства для моделирования асинхронного двигателя, содержащие сумматоры, функциональный блок с характеристикой ограничения, Олоки умножения, деления и коэффициентов, не учитывают влияния активного и реактивного токов двигателя, соотношение между которыми отражается круговой диаграммой токов, и влияния характеристик сети питания вместе с генератором на механическую и пусковую характеристики асинхронного двигателя.
В предлагаемое устройство, с целью расширения функциональных возможностей и повышения точности моделирования, введены последовательно с-оединененные блок умножения и два параллельных сумматора с интервалом между выходом одного и входом другого.
Применение предлагаемого устройства позволит расширить функциональные возможности и повысить точность моделирования за счет учета влияния на механическую и пусковую
характеристики величины активного и реактивного токов асинхронного двигателя, соотношение между которыми отражается круговой диаграммой токов, через отклонения частоты и напряжения сети питания, величины
которых определяются характеристиками сети питания вместе с генератором.
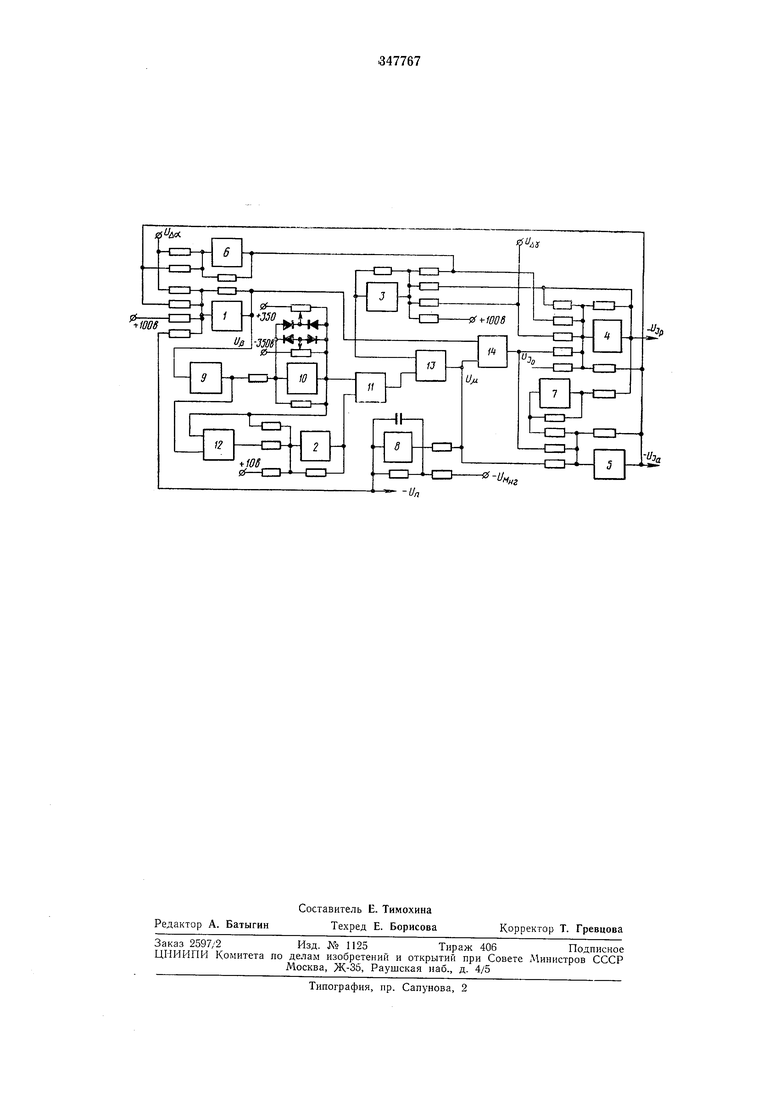
На чертеже представлена схема предлагаемого устройства.
На схеме обозначено: напряжение t/ , пропорциональное абсолютному скольжению; напряжение U,, пропорциональное электромагнитному моменту; напряжение 6/„, пропорциональное скорости выходного вала п;
напряжение UM , пропорциональное моменту
К
сопротивления нагрузки напряжения , пропорциональные отклонениям от номинальных значений частоты и напряжения Да и AY сети питания, вызванные внешними
по отношению к двигателю причинами; напряжения и la , Ui-p, пропорциональные активному и реактивному токам; напряжение //„, пропорциональное току холостого хода при номинальных частоте и напряжении сети пиУстройство содержит сумматоры /, 2, 3, 4, 5, 6, инвертор 7, интегратор 8, блок 9 коэффициентов, функциональный блок 10 с характеристикой ограничения, блок // деления и блоки 12, 13, 14 умножения.
Нанряжения Un с выхода устройства по скорости п, Ui с выхода устройства по активному току /а, Ьда, пропорциональное отклонению частоты Да, и постоянное напряжение, соответствующее синхронной скорости моделируемого двигателя, подают на вход входного сумматора 1. В результате на его выходе получают напряжение И , пропорциональное абсолютному скольжению (3.
Напряжение U-, с входного сумматора / поступает на вход блока 14 умножения и через блок 5 коэффициентов (блок делителей напряжения) подается иа блок 12 умножения и на функциональный блок У( с характеристикой ограничения. С выхода блока 10 напряжение поступает одновременно иа блок 11 деления, второй вход блока 12 умножения и сумматор 2, другие входы которого подключены к выходу блока 12 умножения и к источнику постоянного напряжения.
Напряжение с выхода сумматора 2 поступает на второй вход блока 11 деления, с выхода которого результирующее напряжение поступает на блок 13 уг-сножения. На второй вход блока 13 умножения через сумматор 3 подают напряжение f/дт, пропорциональное отклонению напряжения Д, постоянное напряжение, соответствующее номинальному напряжению сети, напряжение U; с выхода устройства по реактивному току /р и с выхода сумматора 6-сумму напряжений t/дс, и 6 / , которая одновременно с напряжениями 7д и t// поступает на вход сумматора 4. В результате умножения на выходе блока 13 умножения получают напряжение U,, пропорциональное электромагнитному моменту |а,, развиваемому магнитным потоком в воздушном зазоре двигателя.
Напряжение U. подают на входы блока 14 умножения, сумматора 5 и интегратора 5, охваченного отрицательной обратной связью, глубину которой определяют потерями, пропорциональными скорости двигателя, на второй вход которого подают напряжение t/Мд, пропорциональное моменту сопротивления нагрузки . С выхода интегратора 3 снимают напряжение Un, которое подают на входной
сумматор /.
На второй вход блока 14 умножения подают напряжение U с выхода входного сумматора 1. Результирующее напряжение с блока 14 умножения поступает на входы сумматоров
4 и 5. На один из входов сумматора 4 подают постоянное напряжение L//, пропорциональное току холостого хода. В результате суммирования всех поступающих напряжений на выходе сумматора 4 получают напряжение
и J которое через инвертор 7 подают на вход сумматора 5. В результате на его выходе получают напряжение Uj. .
Предмет изобретения
Устройство для моделирования асинхронного двигателя, содержащее сумматоры, инверторы, блок деления, источники питания и блоки умножения, отличающееся тем, что, с целью повышения точности моделирования, в нем первый блок умножения подключен ко входам двух сумматоров, причем между выходом первого и входом второго сум.маторов включен инвертор, а входы первого блока умножения соединены с выходом третьего сумматора и выходом второго блока умножения, вход которого соединен с выходом блока деления, вход первого сумматора соединен с источником напряжения, пропорциональным току холостого хода, а выходы первого и второго сумматоров соединены с выходами устройства по активному и реактивному токам
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ АСИНХРОННОГОДВИГАТЕЛЯ | 1970 |
|
SU264807A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ АСИНХРОННОГОДВИГАТЕЛЯ | 1971 |
|
SU290294A1 |
| Электропривод переменного тока | 1986 |
|
SU1372578A1 |
| Устройство для моделирования электрических машин | 1988 |
|
SU1597886A1 |
| Устройство для измерения скорости вращения асинхронного двигателя с фазным ротором | 1981 |
|
SU1010564A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1985 |
|
SU1307468A1 |
| Устройство для моделирования электромагнитных полей и процессов в асинхронных машинах | 1989 |
|
SU1683041A1 |