Мс1ши)1ы для; 1и оизБОДСтва зщ г гзцхв ть (кaнaв0 oпaтev и) .с. бесконечной ковялевой цепью в каче)ств роющего орудияj установленное на гусенйнном; ходу, и снабжённые поцёречнЫм отводящий грунт транспортером. В предлагаемой транспортер может переMeuja bpj, корауса машины илсочлеН€(н о подв|1ясной, рамой цепн длд,03 и жцЬстй подхватывания при лю|6дм ее полож нии, подаваемого ковшами грунта./
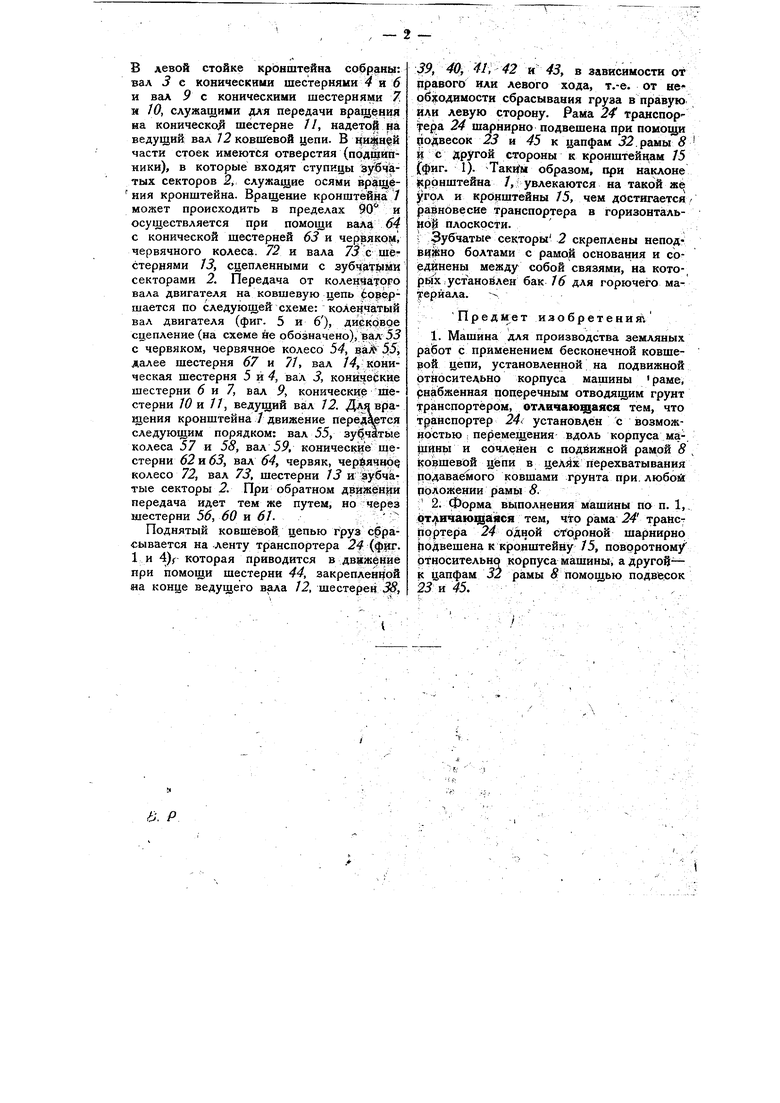
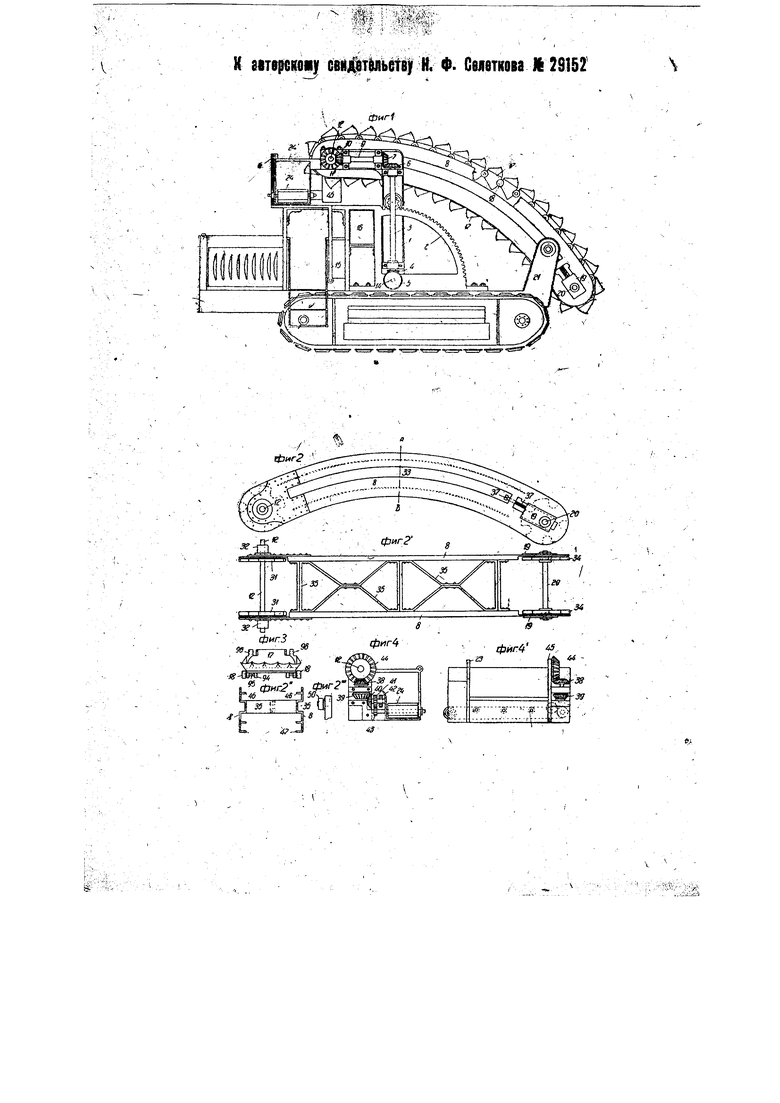
На схематическом чертеже фиг- 1 изображает боковой вид .машины; фиг. 2 - направляющую раму - фиг1 2 - то же, вид сверху; фиг. 2 - разрез еепо АВ на фиг. 2; фиг. 2 деталь рамы; фиг. 3 -звено ковшевой цепи; фиг. 4 - вид транспортера спереди; фиг. 4 - вид его сбоку; фиг. 5 - вид в плане на передаточные механизмы от двигателя; фиг. 6 - вид поворотного, несущего направляющую раму кронштейна сбоку; фиг. о - вид го спереди.
Машина представляет собой мелкоковшевой экскаватор на гусеничном ходу. Ковши соединены в замкнутую цець, приводимую в движение ведущим валом. Отдельные звенья (ковши) /7 цепи соединены между йобою при помощи проушин 94 - 96 и болтов (фиг. 1 и 3). Н внешние концы болтов: надеты, ролики J8 для смягчения трения цепи о нал| ааяяющую раму 8, по ребрам 46 и 47 которой Сфиг. 2) они передвиггш тся во время работьГ ашины. (ама состоит из двуз изогнутых по дуге станин, соединенныхмежду собою связями J5 (фиг. 2 и, 2). На концах рамы закреплены: ведущи вал /2 с двумя ведущими колесавй 5// со средним диаметром в шестьдеся сантиметров, и направляк щий вал 2К того же диаметра с двумя иаправляющими колесами 34. Наружн1:йе боковые поверхности рамы имеют пазы 33 для скольжения роликов 50, закрепленных в кронштейнах основания 2/ рамы (фиг. 1 и 2). Через кронштейны и ось роликов пропущены болты для закрепления рамы 8. Ведущий вал расположен в подшипниках 32 рамы 8. Направляющий вал помещен в подшипниках ползунов /У, которые могут передвигаться при помощи винтов 37, служа-, для натяженияковшей цепи. Цапфы J2 рамы помещены в подшипниках кронштейна 7 (фиг. 1 и 2}, состоящего из двух изогнут тых под прямым углом стоек (фиг. б и 6, соединенных между собою связями 74.
левой стойке кронштейна собраны: ал 3 е коническими шестернями 4 и 6 вал 9 с коническими шестернями 7, W, служащими для передачи вращения на коническоЯ шестерне //, надето на ведущий вал J2 ковШевой цепи. В наа$н й части стоек имеются отверстия (подщипики), в которые входят ступицы зуВчаых секторов 2,. служащие осями вращения кронштейна. Вращение кронштейна / может происходить в пределах 90 и осуществляется при помощи вала 64 с конической шестерней 63 и червяком) червячного колеса. 72 и вала 73 с шестернями J3, сцепленными с зубчатыми секторами 2. Передача от коленчатого вала двигателя на ковшевую цепь Довершается по следующей схеме: коленчатый вал двигателя (фиг. 5 и 6), дисковое сцепление (на схеме не обозначено), вал- 53 с червяком, червячное колесо 54, BUJ 55, далее шестерня 67 и 7/, вал М, коническая шестерня 5 и , вал 3, конияеские шестерни б и 7, вал 9, конические шестерни JO и //, ведущий вал 72. Для вращения кронштейна / движение переде|ется следующим порядком: вал 55, зубчатые колеса 57 и 58, вал 59, конические шестерни 62 и 65, вал 64, червяк, черйячно колесо 72, вал 73, шестерни J3 и зубчатые секторы 2. При обратном движении передача идет тем же путем, но через шестерни 56, 60 и 61.
Поднятый ковшевой цепью груз с расывается на ленту транспортера 24 (фиг. 1 и 4)г которая приводится в движение при помощи шестерни 44, закрепленцой на конце ведущего вала 12, шестерен 38,
39, 40, 41, 42 я 43, в зависимости от Правого или левого хода, т.-е. от не об одимостк сбрасывания груза в правую или левую сторону. Рама транспортера 24 шарнирно подвешена при помощи подвесок 23 и 45 к цапфам 52.рамы 9 и с Другой стороны к кронштейнам /5 (фиг. 1). Таким образом, при наклоне «ронштейна /.увлекаются на такой же угол и кронштейны /5, чем достигается равновесие транспортера в горизонтальИо8 плоскости.
Зубчатые секторы 2 скреплены неподвцжно болтами с рамой основания и соединены между собой связями, на кото-, рйх уст ановлен бак J6 для горючего материала. --,
Предм ет изобретение
1. Машина для производства земляных paiSoT с применением бесконечной ковше)зой цепи, установленной на подвижной относительно корпуса машины раме, рнабженная поперечным отводящим грунт транспортером, отличающаяся тем, что транспортер 24 установлен с возможностью I перемещения- вдоль корпуса маpii Hbi и сочленен с подвижной рамой 8 ковшевой цепи в цеЛйх перехватывания цодавае його ковшами грунта при. любой положении piaMbr .
: 2. Форма вьщолнения машины по п. 1, рт;;1ичаю1ца:яся тем, чТо рама 24 трансу йортера 24 одной шарнирно Ьодвешена к К ронштейну /5, поворотном/ Относительно корпуса машины, а другой - к цапфам 5j рамы помощью подвесок 23 а 45,
фиг/
| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для проходки шахт | 1932 |
|
SU34496A1 |
| Колесный канавокопатель | 1949 |
|
SU89763A1 |
| Торфочерпательная машина | 1928 |
|
SU13567A1 |
| Центробежная машина для отливки труб | 1935 |
|
SU46682A1 |
| Пильная машина для разработки мерзлых грунтов и вскрытии твердых наносов | 1934 |
|
SU44208A1 |
| Торфодобывающая машина | 1929 |
|
SU16157A1 |
| Ковшевой элеватор для драг и землечерпалок | 1924 |
|
SU2159A1 |
| Самодвижущаяся зимняя повозка | 1924 |
|
SU8813A1 |
| Погрузочная ковшовая машина | 1940 |
|
SU60606A1 |
| Одноковшовый экскаватор | 1987 |
|
SU1463870A1 |
Д4

