Известны захваты для штучных грузов с грибовидной головкой, содержащие корпус, смонтированный в гнезде штанги манипулятора, подпружиденные захватные рычаги, шарнирно установленные на корпусе, и шток с коническим наконечником, подвижно установленный в (Вертикальной направляюш,ей корпуса и воздействуюш,ий на верхние концы рычагов.
Целью .изобретения является обеспечение автоматического центрирования захвата при наведении его на поднимаемый груз.
Это достигается тем, что корпус свободно с радиальным зазором установлен в гнезде штанги, снабженном пружинами, удерживающими корпус :в среднем положении.
Кроме того, для предохранения головки груза от пов1реждений губки захватных рычагов снабжены пружинными амортизаторами.
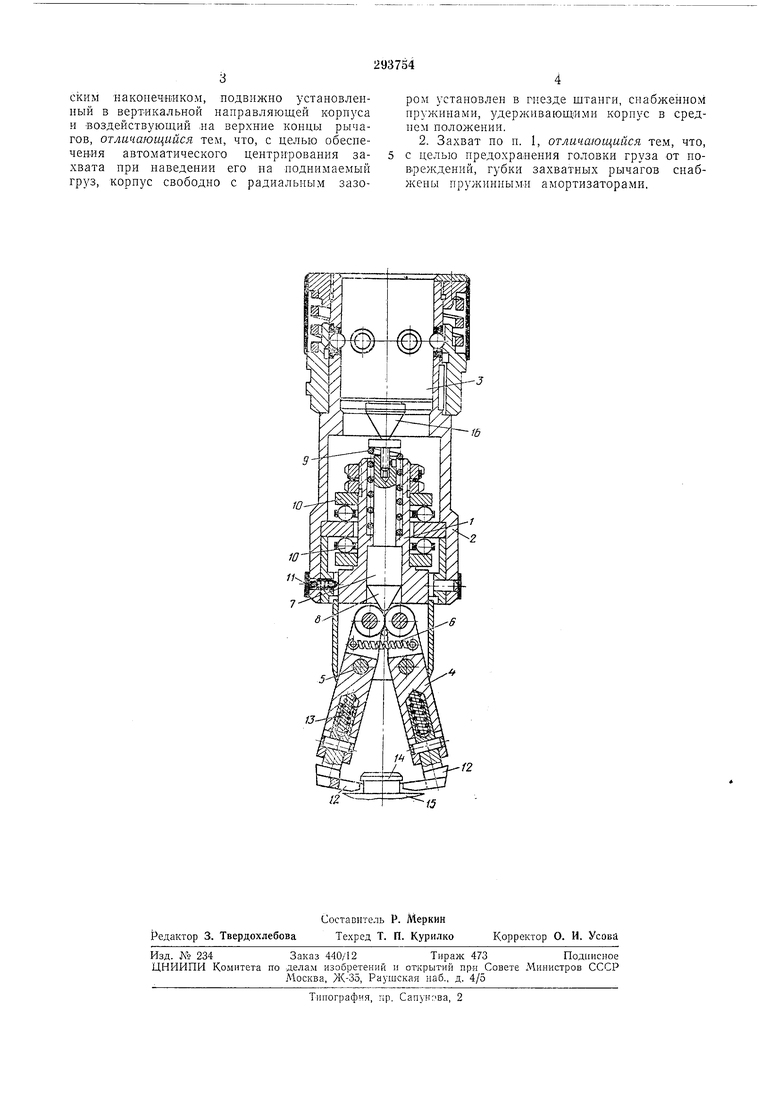
Па чертеже схематически показан описываемый захват.
Корпус 1 смонтирован в гнезде 2 штанги 3 манипулятора. Захватные рычаги 4 установлены на шарнирах 5 корпуса / и снабжены в верхней части стягивающей пружиной 6. В направляющей корпуса 1 подвижно установлен щток 7 с коническим наконечником 8 и возвратной пружиной 9. С помощью, Например, упорных подшипников W
корпус / свободно с радиальным зазором установлен в гнезде 2, снабженном пружинами 11, удерл ивающими корпус / в среднем положении. Губки 12 рычагов 4 снабжены пружинными амортизаторами 13.
В исходном полол ении захват с раскрытыми рычагами 4 наводится на гр.ибовидную головку 14 груза 15 и опускается до тех пор, пока губки 12 не коснутся головки 14. При
этом амортизаторы 13 предохраняют головку 14 от ударов. После этого штырь 16 манипулятора выдвигается и нажимает на шток 7, который своим коническим наконечником 8 воздействует на верхние концы рычагов 4,
благодаря чему губки 12 смыкаются под головкой 14. В случае несоосности между штангой 3 и грузом 15 корпус / смещается в горизонтальном направлении и автоматически центрируется по грузу 15. После доставки
груза 15 к месту укладки штырь 16 втягивается на место, пружина 9 поднимает шток 7, и рычаги 4 под действием Пружины 6 раскрываются ц освобождают груз 15,
Предмет изобретения
I. Захват для штучных грузов с грибовидний головкой, содержащий корпус, смонтированный в гнезде штанги манипулятора, подпружиненные захватные рычаги, шарнирно закрепленные на корпусе, и шток с коипческим нако11еч Н|Иком, подвижно установленный в вертнкальной направляющей корпуса и воздействующий ,на верхнне концы рычагов, отличающийся тем, что, с целью обеснечения автоматического центрирования захвата при наведении его на поднимаемый груз, корпус свободно с радиальным зазором установлен в гнезде щтангн, снабженном пружинами, удерживающими корпус в среднем положении.
2. Захват ио п. 1, отличающийся тем, что, с целью предохранения головки груза от поВ1реждений, губки захватных рычагов снабжены пружинными амортизаторами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1976 |
|
SU595145A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ГРИБОВИДНОЙ ГОЛОВКОЙ | 1972 |
|
SU412116A1 |
| Устройство для загрузки и удаления деталей | 1982 |
|
SU1015995A1 |
| Захватная головка манипулятора | 1976 |
|
SU613891A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Захват манипулятора | 1976 |
|
SU582175A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Захват для грузов с грибовидной головкой | 1980 |
|
SU922035A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ВЫЕМНОГО БЛОКА | 2013 |
|
RU2547031C1 |
/г
