1
Изобретение относится к подъемно-транспортной технике, а именно к грузозахватным устройствам манипуляторов, и предназначено для захвата и перемещения штучных грузов, имеющих плоские и цилиндрические захватные поверхности.
Известен захват манипулятора, содержащий корпус, подпружиненные захватные рычаги, щарнирно установленные в корпусе, и вертикально подвижный клин (конический наконечник) , воздействующий на верхние концы рычагов 1.
Однако отсутствие самоцентрирования захватных рычагов по грузу требует очень точного наведения захвата на ось груза при соединении захвата с грузом, а в противном случае происходит деформация щтанги манипулятора или смещение груза.
Прототипом изобретения является захват манипулятора, содержащий корпус, в котором щарнирно закреплены подпружиненные захватные рычаги, имеющие на одних концах ролики, взаимодействующие с подвижным в вертикальном направлении от привода клином для сведения захватных рычагов, а на других-прижимные губки 2.
В этом захвате не обеспечивается самоцентрирование захватных рычагов по грузу.
Целью изобретения является обеспечение захвата грузов, вертикальная ось симметрии
которых не совпадает с осью симметрии захвата манипулятора.
Для этого корпус выполнен с лазом, в котором установлен с возможностью его горизонтального перемещения клин.
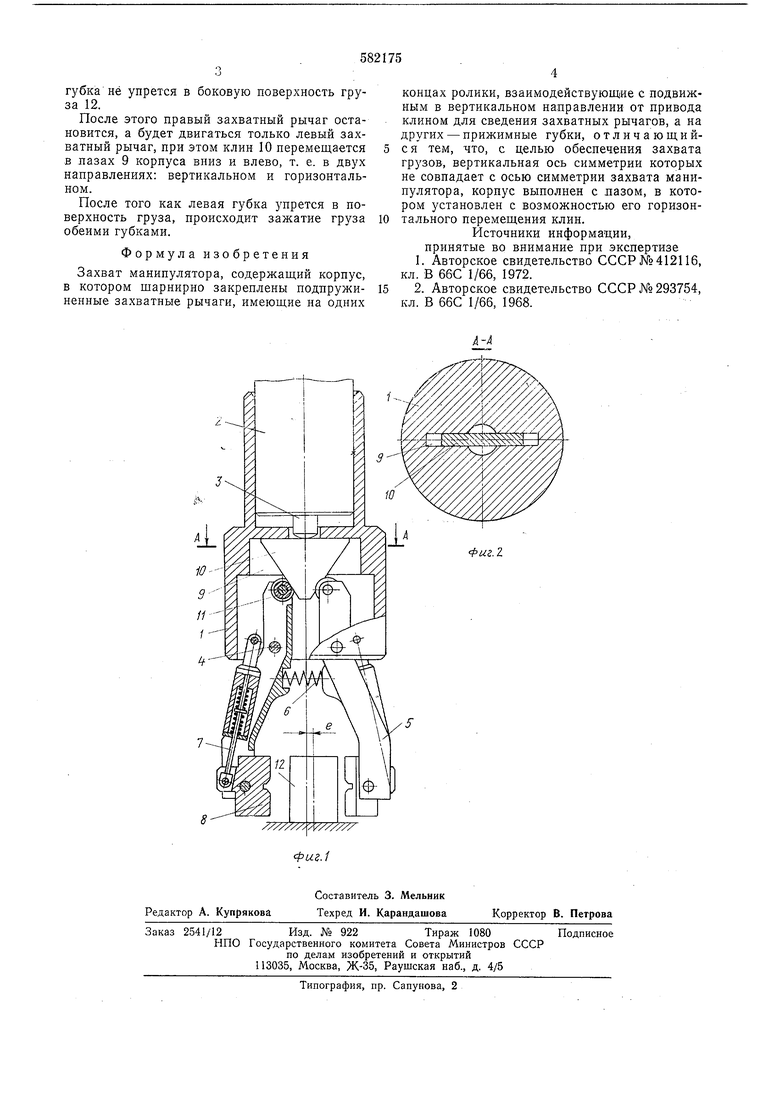
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - сечение по А-А на фиг. 1.
Корпус 1 захвата крепится на щтанге 2 манипулятора, имеющей управляющий щток 3. В корпусе на осях 4 щарнирно установлены захватные рычаги 5, подпружиненные пружиной 6 и снабженные дополнительными тягами 7, обеспечивающими параллельность губок 8.
В корпусе захвата в плоскости перемещения захватных рычагов выполнены пазы 9, в которых установлен с возможностью вертикального и горизонтального перемещений клин 10, выполненный в виде пластины. Клин воздействует на верхние концы захватных рычагов, снабженных роликами 11.
Захват работает следующим образом. После наведения захвата на груз 12 с некоторой несоосностью е включают привод управляющего щтока 3, который выдвигается и начинает перемещать клин 10.
Клин 10, воздействуя на верхние концы захватных рычагов 5, начинает равномерно сдвигать губки 8 захвата до тех нор, пока правая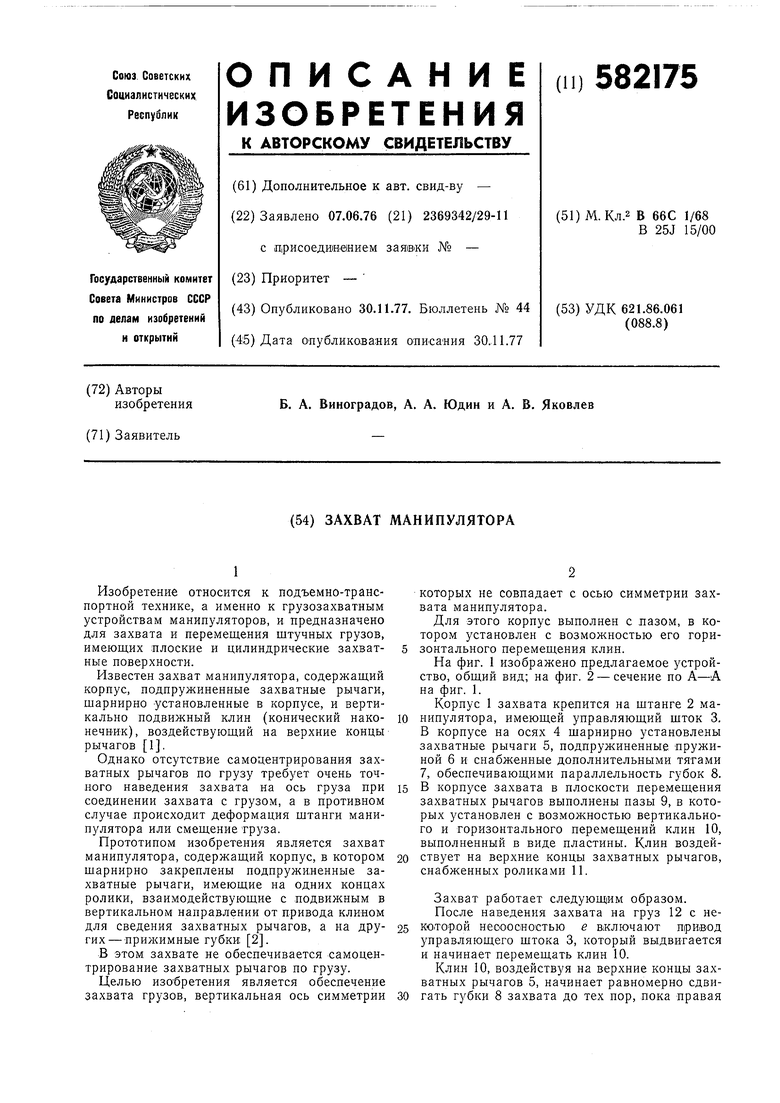
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ С ГРИБОВИДНОЙГОЛОВКОЙ | 1971 |
|
SU293754A1 |
| Захватная головка манипулятора | 1976 |
|
SU613891A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ГРИБОВИДНОЙ ГОЛОВКОЙ | 1972 |
|
SU412116A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| АДАПТИВНЫЙ ЗАХВАТ РУКИ МАНИПУЛЯТОРА | 1991 |
|
RU2022778C1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Захватная головка манипулятора | 1976 |
|
SU595145A1 |
