И:зобретенис относится к области гру.зоза.ватных устройств и может быть иснользовано для за.хвата не менее двух тнпораз « еров штучных грузов нрн их транснортированни, перегрузке или манипулировании, паиример в герметичных камерах на атомных электростанциях и других объектах.
Известен захват для нилиндрнческнх грузов, содержании раму, на которой шарнирно закреплены новоротные иодхватные лапы и .механизм (|)иксаинн захватных лан 1.
Недостатком этого захвата ивляегся невозмо 11ост1, захвата нзделнн различных типоразмеров.
Известна захватпая оловка мапипулятора, соде /кан1ая корпус, в котором подвижно ус1анов,:1ен нггок с приводом его перемещения, взанмодействуюиип с роликами, закрепленными иа одних концах иодпружинеппых захва1ЧП)1х piji4aroB, нюрннрио установленных внутри корпуса .2.
Однако указанные захваты позволяют производить манипуляции одним типоразмером груза, находяши.мся в заранее известном положении, ноэто.му иосле из.менения типоразмера груза илн его положения относительно захвата необходимо менять захват.
Целью изобретения является обеспечение захвата изделий различных типоразмеров.
Для этого зах15атная головка снабжена по крайней мере одной донолнительиой парой подпружиненных захватных рычагов, закренленных енаружн ко;1нуса, каждый из которых снабжен, нанрш.ер, кронштейном с пазом, при это.м корпус выно.1нен с продольными паза.ми, в котор1 х :1асположены закрепленные на иггоке унравляюн1ие выступы, взаимодействуюниге с дополнительными захоагными
рычагамн, и (|)нксирую1цие выстуны, взанмодействхюшне с пазами кроннггейнон.
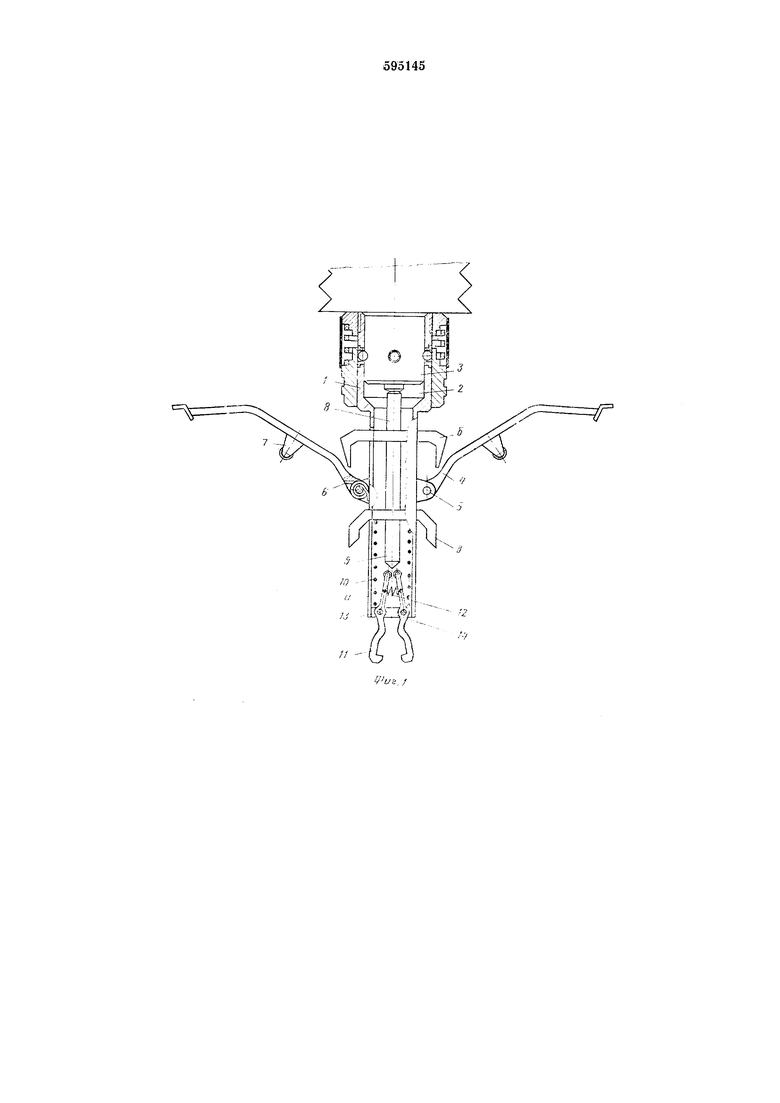
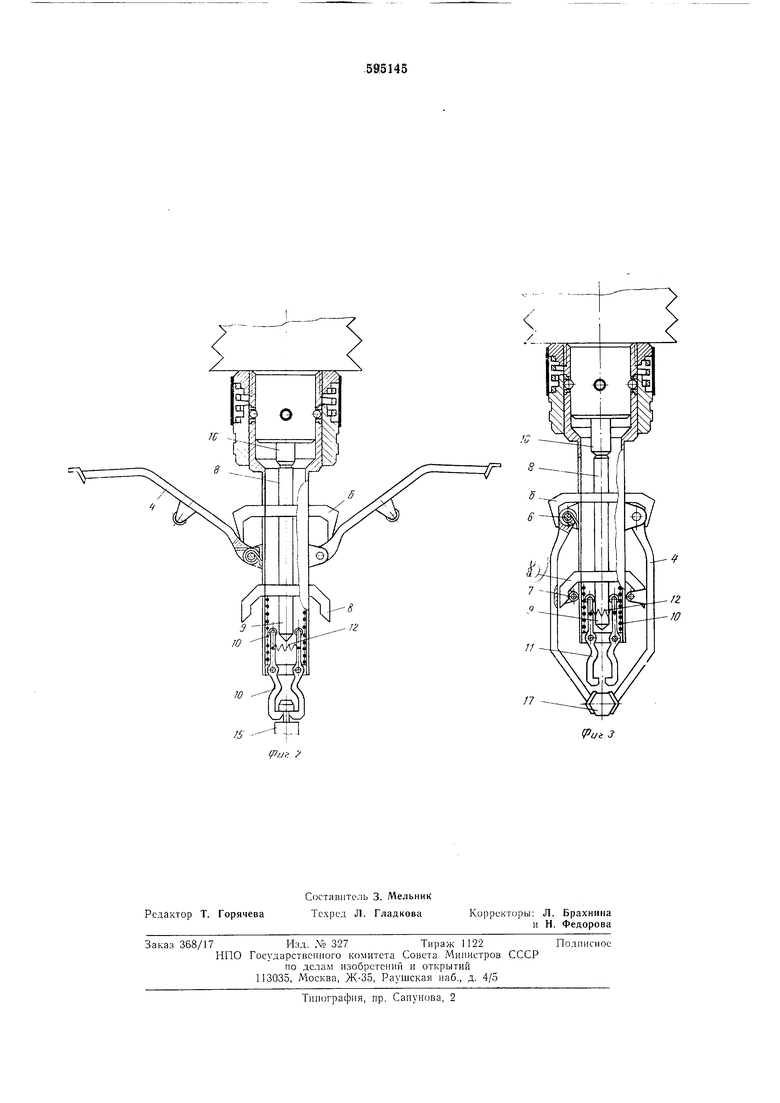
Иа фиг. 1 нзображеиа нредлагамля головка, находянхаяся в исходном состоянии, общий вид в разрезе; на фиг. 2 -- то же, с внут)енин.1И захиагиыми рычагами в рабочем положении п нарчлчнымн захватными )ыча1ами в исходном нол(;/кеннн, обнип внд в |)азрезе; на (j)Hr. 3 - го же, при работе наружными захватнымн рычагами, общий вид в разрезе.
Захватная 1оловка для штучных г Пзов содержнг корпус 1 с боковыми назамн о, гнездом 2 для и танги 3 манипулятора. Донолнительные захватные рычаги 4 установлены иа шарнирах 5 корпуса 1 и снабжены
в верхней части возвратными пружинами 6 кручения. Кронштейны 7 расноложены в средней части дополнительных захватных рычагов 4. Шток 8 с унравляюндими выступами б и в, коническим наконечником 9 и возврат3
ной пружиной 10 подвижно установлен внутри корпуса 1. Захватные рычаги 11 со стягивающей пружиной 12 смонтированы на шарнирах 13, расположенных в торновой нробке 14.
Захватная головка работает следующим образом.
В зависимости от величины выхода штыря манипулятора производится захват груза либо рычагами И, либо рычагами 4.
Схватывание груза захватными рычага МИ производится после наведения головки, находящейся в исходном ноложении с разведенными рычагами 4 и 11, на груз 15. После этого щтырь манипулятора выдвнгается li нроизБодит нродольное неременгение щтока 8, который своим коническим наконечником 9 воздействует на верхние конпы рычага И, благодаря чему груз 15 оказывается зажатым в рычагах 11.
При этом управляющие выстуны б и а щтока 8 не доходят до дополнительных захватных рычагов 4 и ноеледние остаются в верхнем положении. После доставки груза 15 к месту укладки щтырь 16 втягивается, нрулчИна 10 поднимает шток 8, а рычаги 11 иод действием нружины 12 раскрываются и освобождают груз 15.
Схватывание груза дополнительными захватными рычага.мп 4 нроизводится THiv же после иаведения головки на груз 17. После этого штырь 16 манипулятора выдвигается и перемен1ает шток 8, который своим коническим наконечником 9 входит между захватными рычагами 11, а управлиюни1мн выстунами б разворачивает дополнительные зах1 атные рычаги 4 в рабочее положение н фнкси4
рующими выстуиами в производит зажим груза 17 в рычагах 4 с помошью кронштейна 7 с пазами, тем самым снимая }1агрузку с выступов б.
Разжимание груза 17 происходит следующим образом.
Штырь 16 манинулятора втягивается на место, нружнна 10 поднимает шток, рычаги 4 иод действием нружин 6 раскрываются и освобождают груз 17.
Формула изобретения
Захватная головка манинулятора, содержан1,ая корпус, в котором нодвнжно устаповлеп шток с приводом его иеремен ення, взаимодейству юп1ий с роликами, закрепленными на одпнх коннах нодпружиненпых захватных рычагов, щарннрно установленных внутри KOjinyca, о т л н чающаяся те.м, что, с не.чью
обеенечения захвата нзделий различных тино)азмеро)5, она снабжена по крайней мере одпой дополннтельной нарой подпружиненных захватных рычагов, закренлеп;1ых снаружи корпуса, каждый из которых снабжен кроннггейном с пазол, при этом корпус выиолнеп с продольиыми наза.ми, в кото)ых расноложеиы закрепленные на штоке унравляюн1ие BI Iстуны, взаимоде1 1стпуюн|не с до 1олн1ггсльнымн захватпымн рычагамн, н фикспруюниш вы1;туны, 1;занм()действую1нне с назам;: кроннггейнов.
Источники ииформацнн, принятые во внимание при уксиертнзе
1.Авторское свндетельст) СССЛ Л1393193, K.-I. В GGC 1/30, 1969.
2.AiiTOpcKcx; свпдстельспю С(ХР Л1293754, к.ч. В 66С 1/6(), 1968.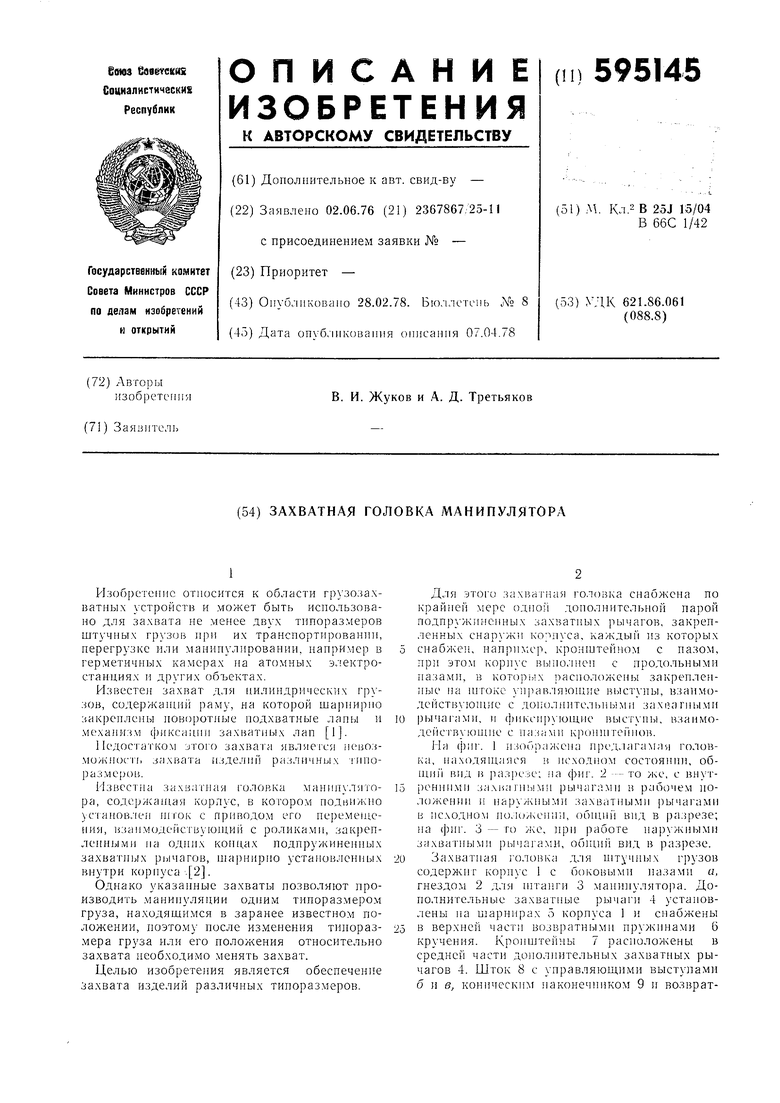

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ С ГРИБОВИДНОЙГОЛОВКОЙ | 1971 |
|
SU293754A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Механическая рука для транспортирования банок щелочных аккумуляторов | 1977 |
|
SU683898A1 |
| Захват манипулятора | 1976 |
|
SU582175A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ГРИБОВИДНОЙ ГОЛОВКОЙ | 1972 |
|
SU412116A1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| ПЕРЕГРУЗОЧНАЯ МАШИНА | 1972 |
|
SU325635A1 |
| Грузозахватное устройство | 1977 |
|
SU727551A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |