Известен способ построения эквидистанты, основанный на построении скорректированной эквидистанты с помощью осно(вного линейнокругового интерполятора и определении поправок к координатам дуг окружностей с помощью вспомогательных линейного и кругового интерполяторов. Недостатком этого способа является его значительная сложность, обусловленная необходимостью вычислять радиус в квадрате инструмента фр.
С целью упрощения в круговой вспомогательной интерполятор вводят Б качестве начальной координаты ПО оси абсцисс величину заданной «поправки, а по оси ординат - нуль, после чего поочередно подают тактовые импульсы на линейный и круговой вспомогательные интерполяторы до появления единичных приращений по оси ординат, сравнивают текущие координаты по оси абсцисс обоих интерполяторов и по сигналу совпадения прекращают их работу.
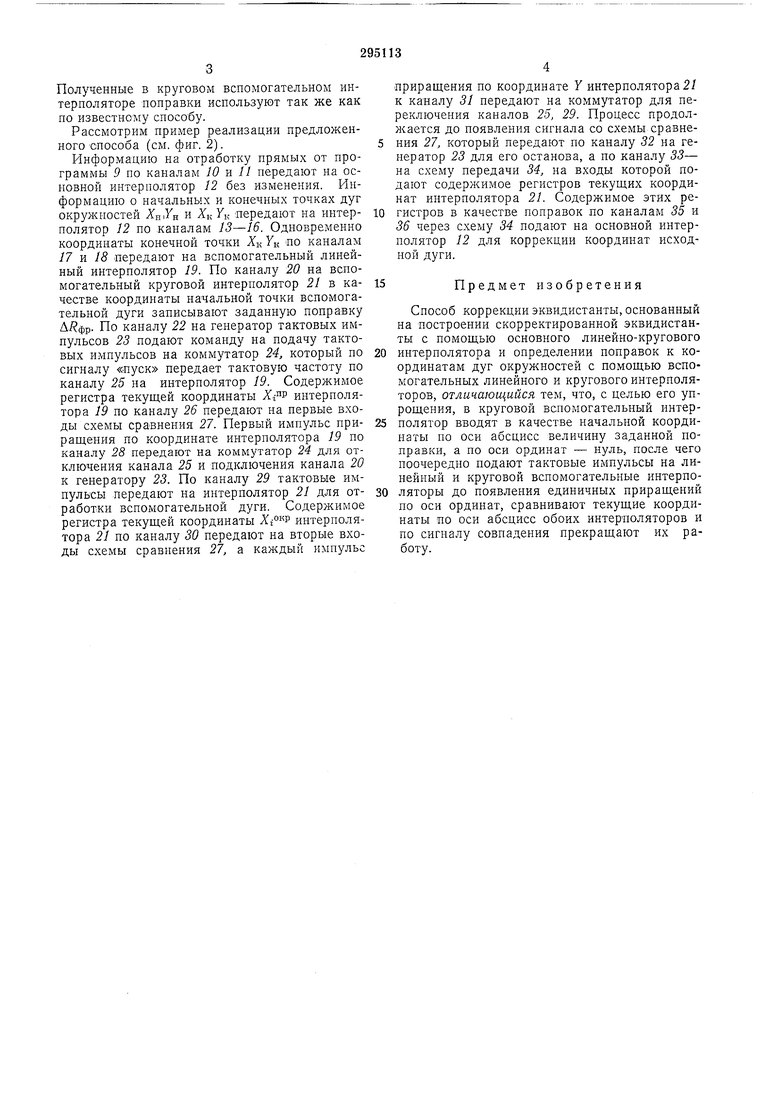
Сущность изобретения поясняется фиг. 1, 2.
Дуга исходной эквидистанты / задается координатами начальной точки 2 (ХнУк). Для обработки дуги скорректированной эквндистанты 3 необходимо найти координаты начальной точки 4 (Ха ) И конечной точки 5 (XKYK). Рассмотрим, например, нахождение координат точки 5. Для этого необходимо найти поправки А/С и АУ к исходным координатам XK и УК точки 6. По предлагаемому способу эти поправки находят интерполяцией прямой 7 из точки 6 в системе координат X KY. В качестве параметров прямой используют координаты конечной точки 6 (Лк УК), которые записывают во вспомогательный линейный интерполятор. Если окончить интерполяцию прямой 7 в точке 5, то текущие координаты этой прямой в системе коорд1 нат X К.У будут равны искомым поправкам АХ и АУ.
Для определения момента выхода прямой 7 в точку 5 используют вспомогательный круговой интерполятор, в который записывают координаты начальной точки А в системе координат X KY, причем абсцисса точки Л А/(, а ордината равна нулю.
При интерполяции дуги 5 из точки Л ее текущие координаты в точке 5 будут равны текущим координатам прямой 7 в точке 5, которые, в свою очередь, равны искомым поправкам. При этом приращения по осп ординат прямой 7 и дуги 8 равны. По предлагаемому способу на оба вспомогатёльных интерполятора по очереди подают тактовую частоту до появления единичных приращений по оси ординат, текущие значения по оси абсцисс сравнивают и при их равенстве выдают сигнал на прекращение рабоПолученные в круговом вспомогательном интерполяторе поправки используют так же как по известному способу.
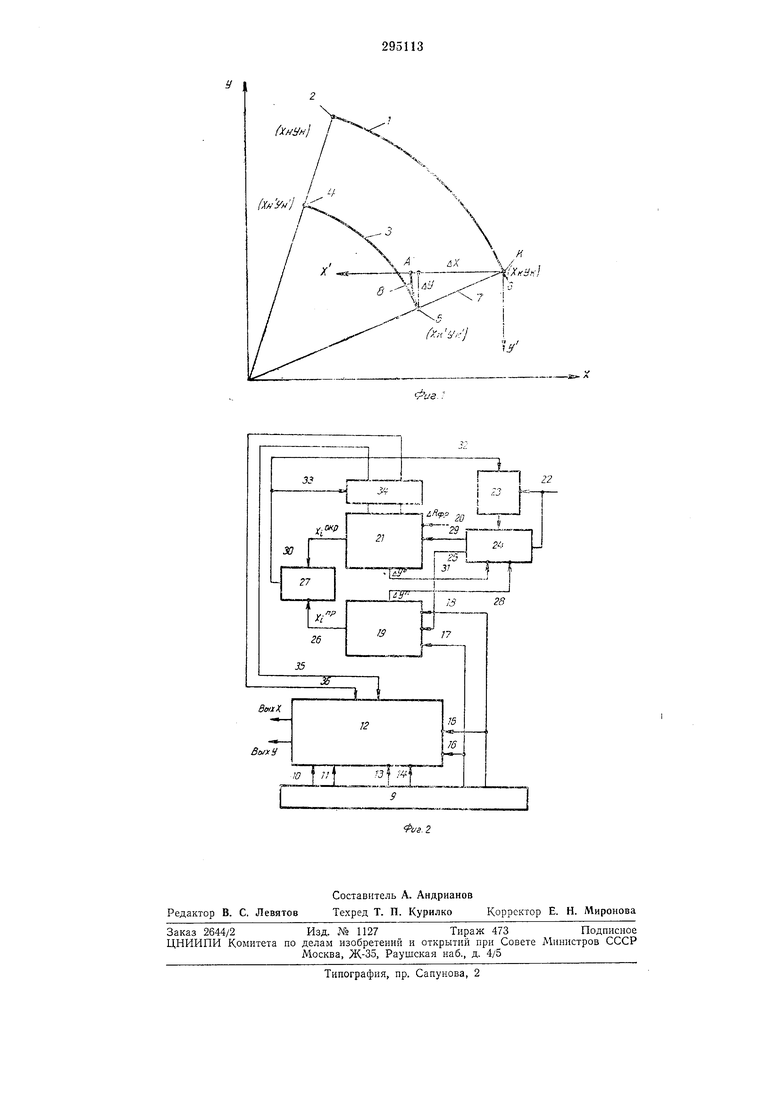
Рассмотрим пример реализации предложенного способа (см. фиг. 2).
Информацию на отработку прямых от программы 9 по каналам 10 ъ 11 передают на основной интерполятор 12 без изменения. Информацию о начальных и конечных точках дуг окружностей Х-пУ-а и Хк УК передают на интерполятор 12 по каналам 13-16. Одновременно координаты конечной точки Х-к УК по каналам 17 и /5 передают на вспомогательный линейный интерполятор 19. По каналу 20 на вспомогательный круговой интерполятор 21 в качестве координаты начальной точки вспомогательной дуги записывают заданную поправку . По каналу 22 на генератор тактовых импульсов 23 подают команду на подачу тактовых импульсов на коммутатор 24, который по сигналу «пуск передает тактовую частоту по каналу 25 на интерполятор 19. Содержимое регистра текущей координаты интерполятора 19 по каналу 26 передают на первые входы схемы сравнения 27. Первый импульс прираш,ення по координате интерполятора 19 по каналу 28 передают на коммутатор 24 для отключения канала 25 и подключения канала 20 к генератору 23. По каналу 29 тактовые импульсы передают на интерполятор 21 для отработки вспомогательной дуги. Содержимое регистра текущей координаты интерполятора 21 по каналу 30 передают на вторые входы схемы сравнения 27, а каждый импульс
приращения по координате У интерполятора 2/ к каналу 31 передают на коммутатор для переключения каналов 25, 29. Процесс продоллсается до появления сигнала со схемы сравнения 27, который передают по каналу 32 на генератор 23 для его останова, а по каналу 33- на схему передачи 34, на входы которой подают содержимое регистров текущих координат интерполятора 21. Содержимое этих регистров в качестве поправок по каналам 35 и 36 через схему 34 подают на основной интерполятор 12 для коррекции координат исходной дуги.
Предмет изобретения
Способ коррекции эквидистанты, основанный на построении скорректированной эквидистанты с помощью основного линейно-кругового
интерполятора и определении поправок к координатам дуг окружностей с помощью вспомогательных линейного и кругового интерполяторов, отличающийся тем, что, с целью его упрощения, в круговой вспомогательный интерполятор вводят в качестве начальной координаты по оси абсцисс величину заданной подранки, а по оси ординат - нуль, после чего поочередно подают тактовые импульсы на линейный и круговой вспомогательные интерполяторы до появления единичных приращений по оси ординат, сравнивают текущие координаты по оси абсцисс обоих интерполяторов и по сигналу совпадения прекращают их работу.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции эквидистанты в системах числового программного управления | 1974 |
|
SU591822A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |
| Устройство для коррекции эквидистанты | 1975 |
|
SU538344A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1972 |
|
SU332438A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
,-J..
