1
Устройство для коррекции эквидистанты относятся к области вычислительных средств управления и может быть использовано в системах для числового программного управления станками (ЧПУ) и других системах для управления техническим оборудованием.
Известно устройство, реализующее способ построения эквидистанты, основанное на построении скорректированной эквидистанты с помощью основного линейно-кругового интерполятора и определении поправок к координатам дуг окружностей с помощью вспомогательных линейного и кругового интерполятора l. Недостатком этого устройства является его аппаратурная сложность, обусловленная необходимостью вычислять квадрат радиуса инструмента ( Т фр. ) и невысокое быстродействие.
Известны устройства расчета эквидистанты (устройства коррекции), основанные на так называемых методах постоянного, больщого и переменного щага 2. Однако такие устройства сложны, так как содержат блоки возведения в квадрат, блоки вычитания, сравнения и коммутатор.
Наиболее близким техническим решением к данному изобретению является устройство, содержащее последовательно соединенные блок задания программы, круговой интерполятор и линейно-круговой интерполят &р,один из входов которого подключен к выходу блока задания программы, генератор тактовых импульсов, первый вход которого подключен к выходу блока регистрации окончания коррекции, второй вход - к первому выходу блока выделения нуля.
Наличие блока, коммутатора и линейного интерполятора усложняет устройство и снижает его быстродействие.
Целью изобретения является упрощение устройства и повышение его &1стродействия.
Эта цель достигается введением в предложенное устройство счетчика, первый вход которого подключен ко второму выходу блока выделения нуля, второй - к выходу генератора тактовых имщ льсов и одному из входов кругового интерполятора, другой вход которого соединен с выходом блока выделения нуля, а выход счетчика подключен ко
входу блока регистрации окончания коррекции.
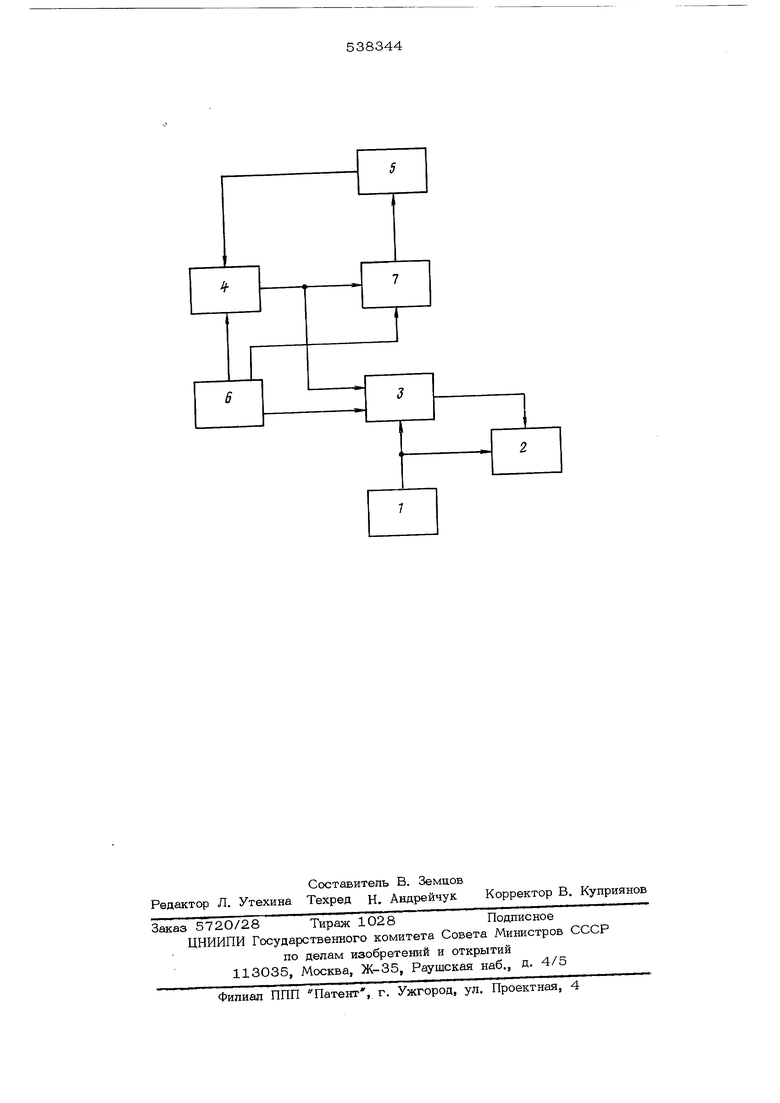
На чертеже дана блок-схема устройства для коррекции эквидистанты.
Устройство содержит блок задания программы 1, выходы которого подключены к линейно-круговому интерполятору 2 и круговому интерполятору 3, генератор тактовых импульсов 4, блок регистрации окончания коррекции 5, блок выделения нуля 6 и счетчик 7.
Устройство работает следующим образом. Информация на обработку кривых поступает из блока задания программ 1 в основной линейно-круговой интерполятор 2. Координаты конечной точки дуги передаются одновременно в интерполятор 2 и 3. При спуске генератор тактовых импульсов 4 начинает подачу тактовых импульсов в круговой интерполятор и счетчик 7. При этом круговая интер поляция происходит до обнуления в одном из регистров координат, например X, интерполятора 3. Этот момент регистрирует блок выделения нуля 6, который подает сигнал на останов генератора 4, затем сигнал на реверс счетчика 7 и одновременно сигяал на обнуление регистра координат интерполятора 3. Поправка Д R р. из блока задания программ заносится в регистр X интерполятора 3.После этого включается генератор 4 и осуществляется круговая интерполяция в обратную сторону до обнуления счетчика 7. Этот момент фиксируется блоком 5, который останавливает генератор 4. Полученные в регистрах координат интерполятора 3 величины проекций поправки ДКлз-р. передаются в интерполятор 2 для коррекции координат исходной дуги. Далее скорректированная информация поступает на исполнительные органы. В предлагаемом устройстве объем аппаратуры сокращен по сравнению 0 известными устройствами на 10-15%. Одновременно повышена производительность станка за счет повышения быстродействия устройства на 10-15%.
Формула изобретения
Устройство для коррекции зквидистанты, содержащее последовательно соединенные блок задания программы, круговой интерполятор и линейно-круговой интерполятор.один из входов которого подключен к выходу блока задания программы, генератор тактовых импульсов, первый вход которого подключен к выходу блока регистрации окончания коррекции, второй - к первом выходу блока выделения нуля, отличающееся тем, что, с целью упрощения устройства и повышения его быстродействия, оно содержит счетчик, первый вход которого подключен ко второму выходу блока выделения нуля, второй - к выходу генератора тактовых импульсов и одному из входов кругового интерполятора, другой вход которого соединен с выходом блока выделения нуля, а выход счетчика подключен ко входу блока регистрации окончания коррекции.
Источники информации, принятые во внимание при экспертизе:
1.Агурский М. С., Вульфсон И. А., Ратмиров В. А. Числовое программное управление станками. Машиностроение М., 1966.
2.Левин Б. И. и Мальчик А. Ю. Способы. подготовки программ и интерполяторы для контурных систем числового управления станками. Машиностроение, М., 197О, стр. 130-142.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции эквидистанты | 1985 |
|
SU1317398A1 |
| Способ коррекции эквидистанты в системах числового программного управления | 1974 |
|
SU591822A1 |
| Устройство для коррекции эквидистанты | 1976 |
|
SU549786A1 |
| Устройство для задания скорости в системах числового программного управления | 1974 |
|
SU541146A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Линейно-круговой интерполятор | 1977 |
|
SU741234A1 |
| Цифровой интерполятор | 1984 |
|
SU1238033A1 |
| Линейно-круговой интерполятор | 1978 |
|
SU896596A2 |
| Интерполятор для систем программного управления | 1977 |
|
SU658528A1 |
| Устройство для коррекции эквидистанты | 1985 |
|
SU1275375A1 |