Известна иозиционная система программного управления с вводом коррекции на установку инструментов в процессе обработки. В этой системе устройство для ввода коррекции содержит запоминающее устройство для храпения величины корректирующей поправки и сумматор для суммирования с соответствующим знаком кодов поправки и программируемой информации. Скорректированная информация с выхода сумматора поступает в систему программного управления. В известном устройстве ввод в сумматор корректирующей поправки и суммирования производятся по командам, поступающим всякий раз, когда производится смена кода программирующего перемещения. Такое построение устройства позволяет вводить корректирующую поправку в позиционную систему программного управления с абсолютной системой отсчета, где программируемое перемещение задается координатой точки, в которую перемещается управляемый механизм.
Недостатком известной системы является то, что она непригодно для ввода корректирующей информации в систему программного управления с относительной системой отсчета, где программируемое перемещение задается величиной приращения координаты из-за того, что, начиная со второй смены кода программируемого перемещения, вводимая из
запоминающего устройства в сумматор поправка не корректирует программируемое перемещение, а искажает его, причем величина искаи ;ения будет накапливаться со сменой кодов перемещения, вводимых от программоносителя.
Целью изобретения является осуп ествленпе возможности ввода корректирующей информации в систему программного управлеппя с относительпой системой отсчета.
Достигается это тем, что в систему введен формирователь команд, вход которого соединен через схему блокировки с одним из выходов коммутатора, а по к зайней мере три выхода подключены к регистру запом нающего устройства и один выход - к сумматору.
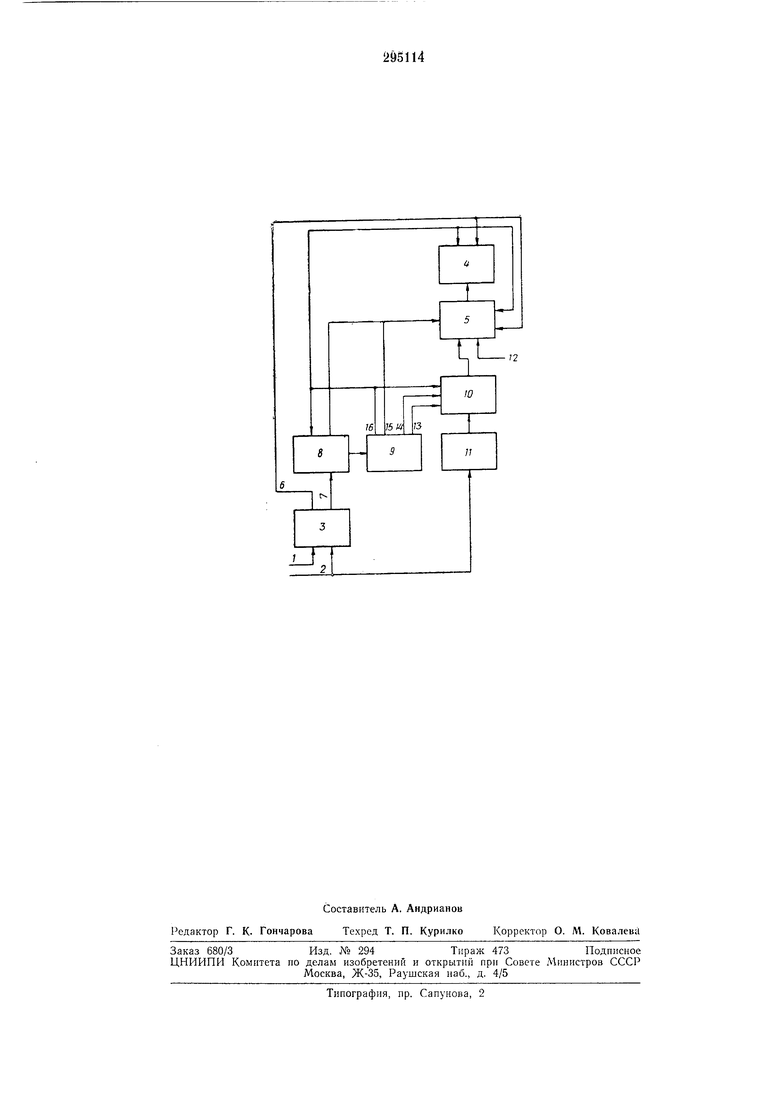
На чертеже приведена блок-схема пpeДv aгаемой системы.
Канал / пуска системы служит для подачи пусковой команды. Канал 2 смены кода инструмента служит для подачи сигналов о смене инструмента. Оба канала связаны с вы.ходными цепями коммутатора 3, который
предназначен для перевода системы программного управления 4 либо в рел-спм работы без коррекции, либо в режим работы с вводом коррекции, для чего он связан с системой управления 4 и сумматором 5 каналом 6 ции через схему блокировки 8 - с формирователем команд 9. Сумматор 5 предназначен для сум1мирования кода поправки, поступающего пз выходного регистра 10 запоминающего устройства 11 с кодом программируемого перемещення, поступающего от программоносителя по каналу 12. Выходной регистр 10 служит для связи запоминающего устройства // с сумматором 5, формирователь команд 9 формирует снгналы-команды для ввода корректирующей поправки и пуска ио окончании ввода коррекции системы программного управления 4 на цикл обработки, для чего формирователь каналом 13 установки нуля и каналом 14 15 передачи кода связан с выходным регистром 10, каналом 15 разрещения суммирования разрешения суммирования связан с сумматором 5, а каналом 16 окончания ввода коррекции с выходным регистром 10, системой программного управления 4 и 20 сумматором 5. Схема блокнровкн 8 предназначена для блокировки цепи запуска формирователя команд 9 ла время ввода ноиравки противоположного знака по окончании цикла обработки, для 25 чего каналом 16 она связана с формирователем команд 9. Работает система следующим образом. При отсутствии сигнала о смене кода инструмента, поступающего по каналу 2, комму- ЗО татор 3 из канала 1 подает сигнал нуска системы, который но каналу 6 передает команду на перенос из сумматора 5 кода программируемого перемещения в систему нрограммного управления 4 и после этого включает ее на 35 обработку. Система работает без ввода корректирующей ноправки. Если в коммутатор 3 но каналу 2 поступил сигнал о смене инструмента {этот же сигнал одновременно поступает в заноми- 40 нающее устройство 11 для выбора поправки соответствующего инструмента), то сигнал пуска системы из канала 1 коммутатором 3 по каналу 7 ввода коррекции через схему блокировки 8 передается на вход формирователя 45 команд 9 и запускает его. Одновременно с этим коммутатор 3 возвращается в исходное состояние. Формирователь команд 9 по каналу 13 выдает команду на установку нуля в выходном регистре 10, затем ио каналу 14 дает команду на перенос кода ноправки из заиоминаюн1,его устройства // в выходной регистр 10, после этого но каналу 15 дает команду в сумматор 5 на суммирование (код программируемого перемен1ения уеж внесен в сумматор) н после того КУК будет произведено суммироваиие, но каналу 16 выдает команду окончания ввода коррекции, ио которой знак ноправки в выходном регистре 10 меняется на иротивоиоложныи, включается схема блокировки 8, скорректированная информация из сумматора 5 передается в систему уиравления 4, и носледняя включается на отработку. Дальнейшая отработка, вызванная сменой кодов нрограммируемого перемещения, производится системой без ввода коррекции до тех нор, пока по каналу 2 не поступит сигнал о смене инструмента, которым коммутатор 3 переводится на режим ввода коррекции. При этом сигнал «пуск системы из канала / через коммутатор 3 каналом 7 через включенную схему блокировки 8 по каналу /5 дает в сумматор 5 команду на суммирование поправки от предыдущего инструмента, но уже с противоположным знаком, и носле суммирования запускают формирователь команд 9, который осуществляет ввод нонравки для носледующего инструмента аналогично описанному, Предмет изобретения Система программного управления металлорежущими станками с автоматической коррекцией программы, в которой запоминающее устройство с выходным регистром нодключено блоком ввода программы с сумматором, отличающаяся тем, что, с целью исключения искажения исходной информации, в нее введен имеющий несколько выходов формирователь команд, вход которого соединен через блокировочное устройство с одним из выходов установленного в системе коммутатора, а по крайней мере три выхода формирователя подключены к регистру запоминающего устройства и один выход - к сумматору.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для задания программы | 1979 |
|
SU849148A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Система для программного управления | 1984 |
|
SU1246053A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1965 |
|
SU171171A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| Многокоординатная система числового программного управления | 1972 |
|
SU448435A1 |
| Устройство для задания программы | 1979 |
|
SU862118A1 |
| СПОСОБ ЗАПИСИ-ВОСПРОИЗВЕДЕНИЯ МНОГОКАНАЛЬНОЙ ЦИФРОВОЙ ИНФОРМАЦИИ | 1995 |
|
RU2107334C1 |
| Устройство для программного управле-Ния элЕКТРОННОлучЕВОй уСТАНОВКи | 1979 |
|
SU840810A1 |