Изобретение относится к устройствам для автоматического направления движения гусеничных тракторов по заданной траектории, например по следу предыдущего прохода, при котором необходимо обеспечить требуемое качество вождения (точность слежения, отсутствие прогрессирующего искривления и т. д.).
Известны устройства для улучшения качества вождения, содержащие копирующий механизм с бесконтактным датчиком рессогласования, промежуточный усилитель и гидравлический сервопривод с приставкой и механическим преобразователем.
Эти устройства слищком сложны по конструкции или имеют ограннченное применение.
Недостатки известных устройств могут быть устранены при одновременном введении производной рассогласования в закон регулироваиия и охвате исполиительных органов системы дополнительиой жесткой отрицательной обратной связью. Кроме улучщения качества автоматического вождения, нри этом новыщается надежность системы, так как обеснечивается автоматическая компенсация износа фрикционных элементов механизма новорота трактора.
согласования сумматор, и механизм обратной связи по перемещению поршня сервопривода, выполненный в виде пружины, один конец которой связан с поршнем сервопривода, а другой конец противодействует усилию электромеханического преобразователя через рычаг, управляющий положеиием золотника приставки с помощью, например, элемента типа «сопло-заслонка.
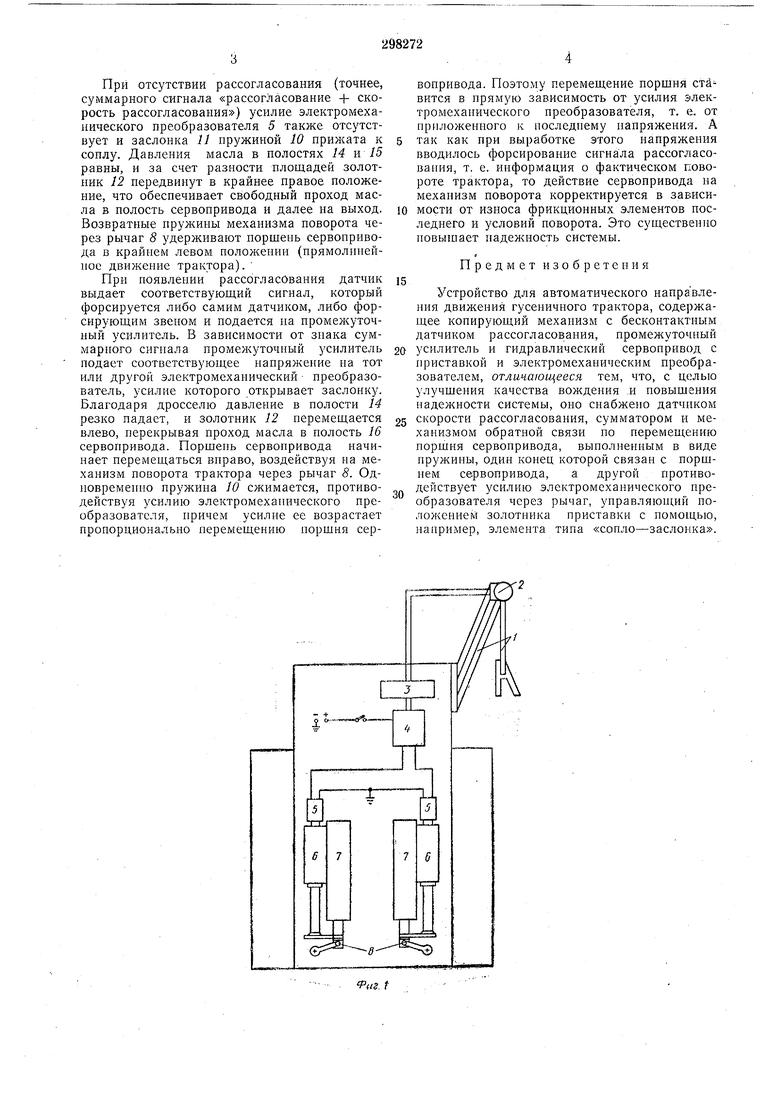
На фиг. 1 показаиа принципиальная схема устройства, на фит. 2 -т- его электро- и гидропривод.
Устройство состоит из копирующего механизма / с бесконтактным датчиком рассогласования 2, блока форсирования (или датчика скорости рассогласования с сумматором) 3, промежуточного усилителя 4, электромехаиических преобразователей, например электромагнитов 5,электрогидравлических нриставок 6 и сервоприводов 7, действующих на рычаги 5 механизма поворота.
Для осуществления дополнительной обрат юй связи якорь электромеханического нреобразователя унирается в рычаг 9, на который
действует пружина 10, другой конец которой связан с норщнем сервопривода. К его рычагу прикреплена заслонка 11, управляюпдая движением золотника 12 перекрытием потока масла через дроссель 13.
При отсутствии рассогласования (точнее, суммарного сигнала «рассогласование + скорость рассогласования) усилие электромеханического нреобразователя 5 также отсутствует и заслонка И пружиной 10 прилсата к сонлу. Давления масла в нолостях 14 п 15 равны, и за счет разности площадей золотник 12 нередвинут в крайнее правое положение, что обеспечивает свободный проход масла в полость сервопривода и далее на выход. Возвратные пружины механизма новорота через рычаг 8 удерживают поршень сервопривода в крайнем левом пололсении (прямолинейное движение трактора).
При появлении рассогласования датчик выдает соответствующий сигнал, который форсируется либо самим датчиком, либо форсирующим звеном и подается на нромежуточный усилитель. В зависимости от знака суммарного сигнала промежуточный усилитель подает соответствующее напряжение на тот или другой электромеханический преобразователь, усилие которого открывает заслонку. Благодаря дросселю давление в полости 14 резко падает, и золотник 12 перемещается влево, перекрывая проход масла в полость 16 сервопривода. Поршень сервопривода начинает перемещаться вправо, воздействуя на механизм новорота трактора через рычаг 8. Одновременпо нружина 10 сжимается, нротиводействуя усилию электромеханического преобразователя, причем усилие ее возрастает пропорционально перемещению порщня сервопривода. Поэтому перемещение норшня стйвится в прямую зависимость от усилия электромеханического преобразователя, т. е. от приложенного к носледнему напряжения. А
так как при выработке этого напряжения вводилось форсирование сигнала рассогласования, т. е. информация о фактическом повороте трактора, то действие сервопривода на мехапизм поворота корректируется в зависимости от износа фрикционных элементов носледнего и условий новорота. Это существенно новьпнает надежность системы.
Предмет изобретения
Устройство для автоматического нанравлення движения гусеничного трактора, содержащее копирующий механизм с бесконтактным датчиком рассогласования, промел уточный
усилитель и гидравлический сервопривод с приставкой и электромеханическим преобразователем, отличающееся тем, что, с целью улучшения качества вождения .и новыщения надежности системы, оно снабжено датчиком
скорости рассогласования, сумматором и механизмом обратной связи по перемещению норщня сервопривода, выполненным в виде пружины, один конец которой связан с порщнем сервопривода, а другой противодействует усилию электромеханического преобразователя через рычаг, управляющий положением золотника приставки с номощью, например, элемента типа «сонло-заслонка.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ СЕРВОПРИВОД УПРАВЛЕНИЯ ГУСЕНИЧНЫХ МАШИН | 1966 |
|
SU188311A1 |
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| Гидравлический сервопривод управления гусеничной машины | 1978 |
|
SU747763A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственных агрегатов | 1959 |
|
SU130256A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ДОЖДЕВАЛЬНЫХ И ПОЛИВНЫХ АГРЕГАТОВвсЕСсюгнАя ПДТЕЙТ110-ТЕУ1Ш'{101?^ | 1972 |
|
SU327891A1 |
| Система рулевого управления транспортного средства | 1980 |
|
SU872358A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ ТРАКТОРА УНИВЕРСАЛА | 2014 |
|
RU2577746C2 |
| АВТОМАТИЧЕСКАЯ НАТЯЖНАЯ СТАНЦИЯ | 1965 |
|
SU224454A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |

iO
Qxad масла
