1
Изобретение относится к машиностроению, в частности к конструкции промышленных манипуляторов и роботов, и может 6HTii использовано при оснащении технологического оборудования 5 средствами автоматической загрузки, выгрузки, ориентации.
Известен манипулятор, содержйщий корпус, силовой.цилиндр подъема, пружину сжатия, кинематически связанную 0 с механизмом захвата, выполненным в виде рычагов, шарнирно закрепленных в держателе, механизм ориентации, включающий шестерню, установленную на корпусе с возможностью одновре- 15 менного вращения с держателем вокруг вертикальной оси и датчик соприкосновения, установленный на кронштейне жеотко связанном с корпусом {1J .
Недостатком известного манипулято-20 ра является высокая стоимость монггажа и сложность изготовления.
Целью изобретения является упрощение конструкции.
Для достижения поставленной цели 25 концы рычагов снабжены роликами, одни из которых являются захватными, шестерня установлена на корпусе с возможностью осевого перемещения и подпружинена, связана с держателем 30
(54) МАНИПУЛЯТОР
и снабжена конической поверхностью, предназначенной для взаимодействия с роликами рычагов, а шестерня и держатель связаны между собой посредством пальца.
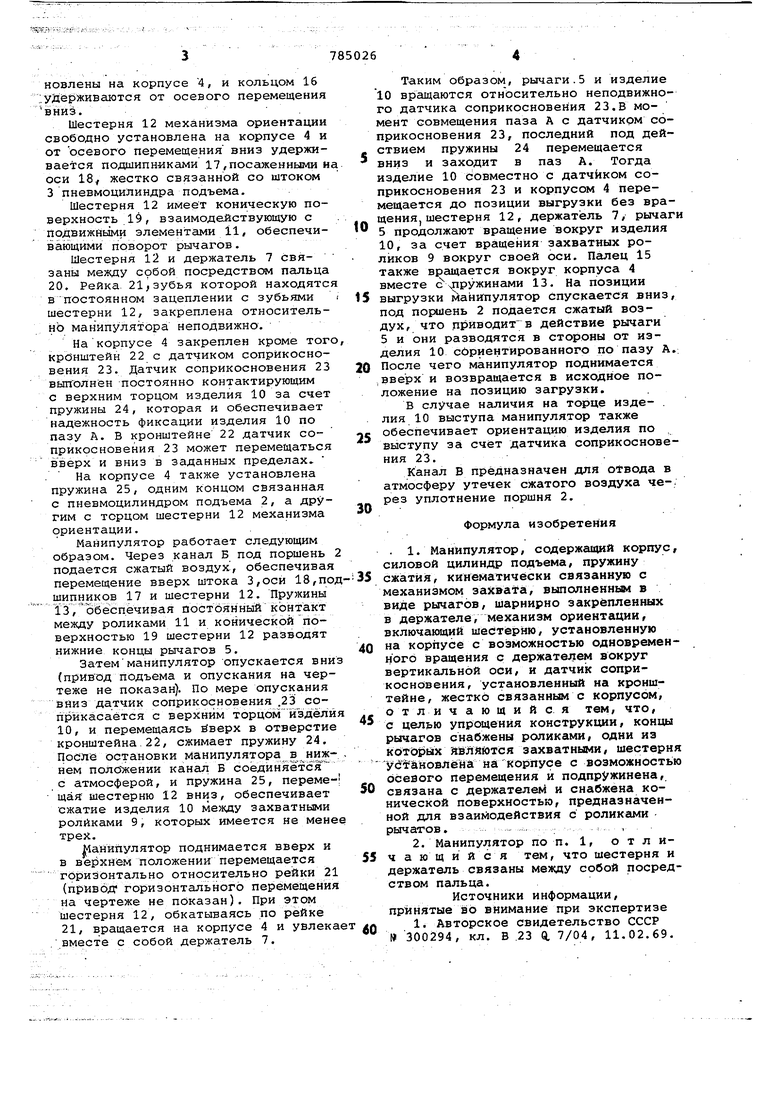
На чертеже показан манипулятор продольный разрез.
Манипулятор состоит из пневмоцилиндра подъема, механизма захвата и механизма ориентации. Пневмоцилиндр 1 подъема, имеющий поршень 2, жестко связанный со штоком 3, установлен на корпусе 4.
Механизм захвата выполнен в виде рычагов 5, шарнирно закрепленных посредством оси б в держателе 7, свободно :, становленном на корпусе 4 .
Держатель 7 кольцом 8удерживается от осевого перемещения вниз. Рычаги 5 на концах имеют захватные ролики 9,, контактирукндие с изделием 10.
Рычаги 5 на противоположных концах имеют подвижные элементы, например, ролики 11, контактирующие с шестерней 12 механизма ориентации.
Постоянный контакт между роликами 11 и шестерней 12 обеспечивают пружины 13, одетые с одной стороны на пальцы 14, ас друго.й стороны на пальцы 15, которые свободно устаовлены на корпусе 4, и кольцом 16 Йёрживаются от осевого перемещения низ.
Шестерня 12 механизма ориентации вободно установлена на корпусе 4 и т осевого перемещения вниз удержиается подааипниками 17,посаженными на оси 18 жестко связанной со штоком 3 пневмоцилиндра подъема.
Шестерня 12 имеет коническую поверхность 1$, взаимодействующую с подвижйь1ми элементами 11, обеспечивающими поворот рычагов.
Шестерня 12 и держатель 7 связаны между србой посредствен пальца 20, Рейка 21,зубья которой находятся в постоянном зацеплении с зубьями естерни 12, закреплена относительно манипулятора неподвижно.
На корпусе 4 закреплен кроме того, кронштейн 22 с датчиком соприкосновения 23. Датчик соприкосновения 23 выполнён постоянно контактирующим с верхним торцом изделия 10 за счет пружины 24, которая и обеспечивает надежность фиксации изделия 10 по пазу А. В кронштейне 22 датчик соприкосновения 23 может перемещаться вверх и вниз в заданных пределах..
На корпусе 4 также установлена пружина 25, одним концом связанная с пневмоцилиндром подъема 2, а другим с торцом шестерни 12 механизма ориентации.
Манипулятор работает следующим образом. Через канал Б под поршень 2 подается сжатый воздух , обеспечивая перемещение вверх штока 3,оси 18,под-шипников 17 и шестерни 12. Пружины 13,обеспечивая постоянный контакт между роликами 11 и конической поверхностью 19 шестерни 12 разводят нижние концы рычагов 5.
Затемманипулятор опускается вниз {привод подъема и опускания на чертеже не показан). По мере опускания вниз датчик соприкосновения .23 соприкасается с верхним торцом йздёлйя 10, и перемещаясь йверх в отверстие кронштейна.22, сжимает пружину 24. После остановки манипулятора в ниж- . нем положении канал Б соединяётс я с атмосферой, и пружина 25, переме-: щая шестерню 12 вниз, обеспечивает сжатие изделия 10 между захватными роликами 9, Которых имеется не менее трех.
Манипулятор поднимается вверх и в верхнем положении перемещается гОр1Иэонтально относительно резаки 21 (привод: горизонтального перемещения на чертеже не показан). При этом шестерня 12, обкатываясь по рейке 21, вращается на корпусе 4 и увлекает вместе с собой держатель 7.
Таким образом, рычаги.5 и изделие Ю вращаются относительно неподвижного датчика соприкосновения 23.В момент совмещения паза А с датчиком соприкосновения 23, последний под действием пружины 24 перемещается вниз и заходит в паз А. Тогда изделие 10 совместно с датчиком соприкосновения 23 и корпусом 4 Перемещается до позиции выгрузки без вращения, шестерня 12, держатель 7, рыча 5 продолжают вращение вокруг изделия 10, за счет вращения захватных роликов 9 вокруг своей оси. Пгшец 15 также вращается вокруг корпуса 4 вместе с чпружинами 13. На позиции выгрузки манипулятор Спускается вниз под поЕхиень 2 подается сжатый воздух, что приводит в действие рычаги 5 и они разводятся в стороны от изделия 10 сориентированного по пазу А После чего манипулятор поднимается вверх и возвращается в исходное положение на позицию загрузки.
В случае наличия на торце изде- . ЛИЯ 10 выступа манипулятор также обеспечивает ориентацию изделия по выступу за счёт датчика соприкосновения 23.
Канал В предназначен для отвода в атмосферу утечек сжатого воздуха через уплотнение поршня 2.
Формула изобретения
. 1. Манипулятор, содержащий корпус силовой цилиндр подъема, пружину сжатия, кинематически связанную с механизмом захвата, выполненньм в виде рычагов, шарнирно закрепленных в держателе/механизм ориентации, включающий шестерню, установленную на корпусе с возможностью одновременного вращения с держателем вокруг вертикальной оси, и датчик соприкосновения , установленный на кронштейне, жестко связанным с корпусом, отличающийся тем, что, с целью упрощения конструкции, концы рычагов снабжены роликами, одни из которых йвЛЯ10тся захватными, шестерн установлёна на корпусе с возможность осевого перемещения и подпружинена, связана с держателем и снабжена конической поверхностью, предназначенной для взаимодействия с ролнками рычагов. .... ; . .,.. , .
2. Манипулятор по п. 1, о т л ич а ю щ и и с я тем, что шестерня и держатель связаны между собой посредством пальца.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №300294, кл. В .23 0,7/04, 11.02.69.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU872254A1 |
| ВСЕСОЮЗНАЯ Iпл:п:^;о-т[лг;;г;[-ндя'j^j^xmiir"— "^ Г^ П Г .! ^"У •• — • .- лL.-: .L-fv It i^^ i ;^i Ij--^ | 1971 |
|
SU300294A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| Автоматический комплекс для штамповки деталей из полосового и ленточного материала | 1987 |
|
SU1551451A1 |
| Устройство для подачи ящиков с откидными крышками и их закрывания | 1985 |
|
SU1333612A1 |
| Микроманипулятор для установки узлов механизма часов | 1982 |
|
SU1083154A1 |
| Консольный кран | 1979 |
|
SU929534A1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Клепально-вальцовочная головка | 1986 |
|
SU1371753A1 |

