Иаобретение относится к области автоматического управления экскаваторами, а именно к устройствам автоматической координации движений механизмов подъема и напора.
Известны устройства автоматического управления напорным двигателем одноковшового экскаватора с индивидуальным электроприводом, обеспечивающие «езависимую, заранее выставленную скорость «апора. Устройства.содержат узел 0|ГраничеБИ1я скорости напорното двигателя етри воз-расталии .нагрузки подъемного двигателя выше допустимого значения. Уставка выбирается из условия полного использования подъемного двигателя по мош.ности- При превышении 1Н:агрузки подъемного двигателя выше уставки узел ограничения снижает скорость или реверсирует напорный двигатель, обеспечивая ковшом препятствия. Отличаясь простотой, известные устройства не обеспечивают нужной коордипадии движений механизмов подъема и напора. Это снижает производительность экскаватора.
Цель изобретения - повысить производительность экскаватора путем обеспечения оптимальной траектории режушего органа.
Это достигается введением узла пропрамм.ного управления скоростью напорного двигателя, содержащего формирователь задающего напряжения сигнала, например сельсин, множитель задающего сигнала на скорость напорного двигателя, например тахогеператор на валу напорного двигателя, и суммирующее устройство, выходной сигнал которого пропоршюнален сумме выходного сигнала множителя и сигнала пропорционального -скорости подъемного двигателя.
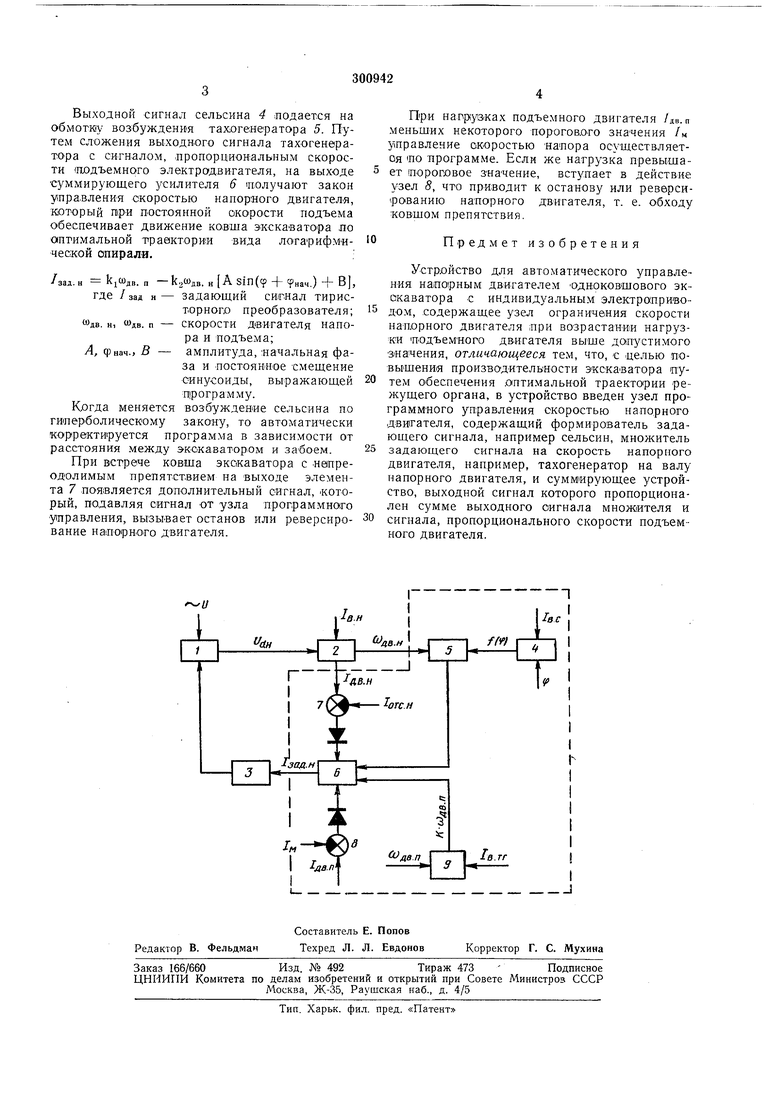
На чертел е приведена схема устройства.
Устройство содержит тиристорный преобразователь 1, выпрямленное напряжение которого подается на двигатель 2 напора, систему управления тиристорным преобразователе 5 и узел программного управления (oi6веден пунктиром).
В качестве задатчика программы взят сельсин 4, ротор которого механически связан с рукоятью. Выход сельсина подключен на об.мотку возбуждения тахогенератора 5, установленного па валу напорного двигателя 2. Выход тахогенератора подан на вход суммирующего операционного усилителя 6. На входы операционного усилителя подключены также выходы узла 7 ограничения тока напорного двигателя, узла 8 ограничения тока двигателя подъема и выход тахогенератора двигателя подъема 9.
При угловом перемещении рукояти из одного крайнего положения (нижнего) в другое (верхнее) сигнал на выходе сельсина 4 изменяется по восходящей ветви .положительной синусоиды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Тренажер машиниста одноковшового экскаватора | 1985 |
|
SU1260998A1 |
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |
| Устройство для измерения загрузки ковша экскаватора | 1983 |
|
SU1145099A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Устройство для управления процессом копания карьерного экскаватора | 1986 |
|
SU1425284A2 |
