Известны автооператоры, выполненные в виде каретки, перемещающейся по горизонтальной балке и несущей траверсу с автоматическим захватом.
Предлагаемый автооператор отличается от известных тем, что в нем рабочая среда подается через цилиндр продольного перемещения каретки и систему обратных клапанов, а к цилиндру привода захвата подводится через корпус автооператора и сверления в направляющих скалах и траверсе.
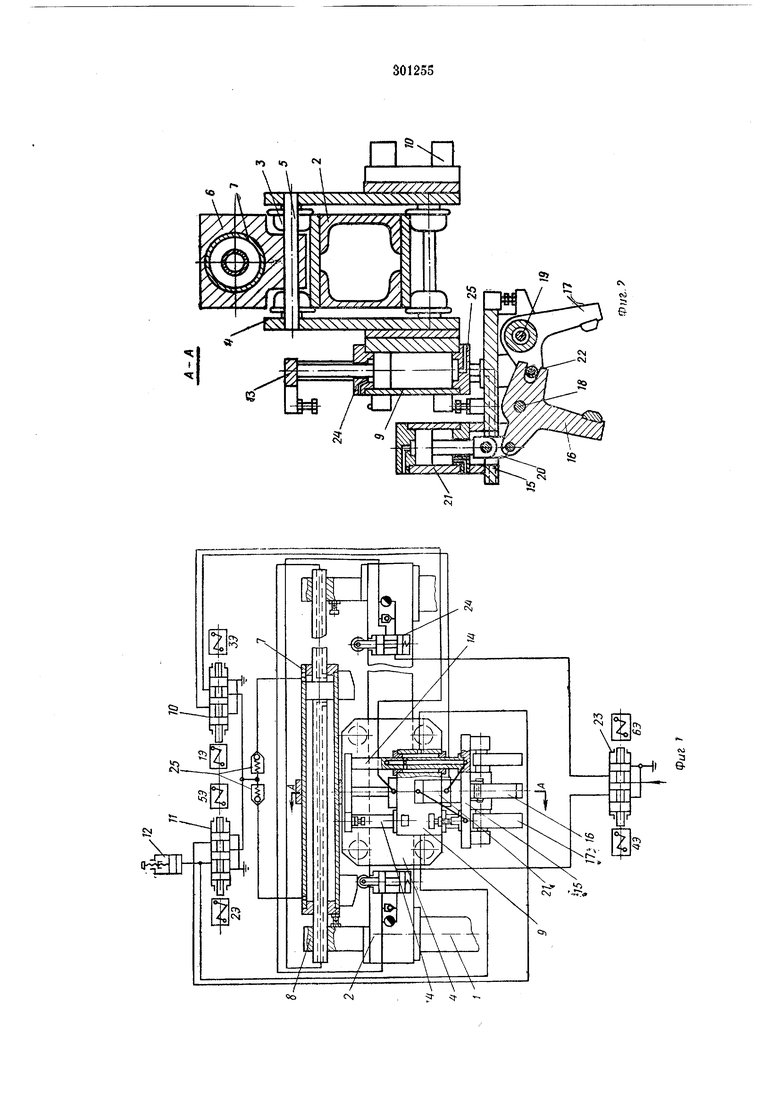
На фиг. 1 изображена пневмокинематическая схема предлагаемого автооператора; на фиг. 2 - автооператор в разрезе.
Па двух штоках 1 установлена балка 2. По балке на роликах 3 катается каретка 4. Каретка через ось 5 связана с кронштейном 6, жестко сидящим на цилиндре 7 продольного перемещения каретки.
Штоки цилиндра жестко закреплены в кронштейнах 8, которые, в свою очередь, л естко установлены на балке.
С одной стороны в бобыщке каретки крепится корпус 9 автооператора, с другой стороны на каретке установлена плита с золотниками 10 VI 11 к реле 12 давления, которые управляют цилиндрами зажима и перемещения захвата. В корпусе 9 смонтирован цилиндр перемещения захвата, шток которого через поперечину 13 связан с направляющими
скалками 14, к противоположным концам которых крепится траверса 15, несущая захват. Скалки 14 ходят в расточках корпуса 9 в направляющих втулках и имеют осевые и радиальные сверления, причем радиальные сверления расположены таким образом, что они на протяжении всего хода штока цилиндра перемещения захвата не выходят за пределы корпуса, т. е. постоянно сообщены с полостями в корпусе.
Траверса 15 несет рычаги 16 и 17 захвата, которые поворачиваются на осях 18 н 19 кронштейнах траверсы. Рычаг 16 захвата через серьги 20 связан со штоком цилиндра 21,
который монтируется на траверсе 15. Другое плечо рычага 16 имеет паз, в который заходит ролик, сидящий на оси 22, закрепленной в коротком плече рычага 17.
Золотник 23 через тормозные золотники 24, служащие для торможения при подводе к упорам при продольном перемещении кареткь, через осевые и радиальные сверления в штоках соединен с полостями цилиндра продольного перемещения, которые, в свою очередь, соединены через отводы в цилиндре и систему обратных клапанов 25 с линией питания золотников 10 и //. Золотник 10 своими отводами через крышки соединен с полостями цилиндра перемещения захвата; золотник 11
пусе и далее через радиальные и осевые сверления в скалках 14 и сверления в траверсе 15, а затем трубами с полостями цилиндра 21. Реле давления подсоединено к верхней бесштоковой полости этого цилиндра.
На фиг. 1 все механизмы автооператора изображены в исходном положении. Сжатый воздух через золотник 23 и левый шток поступает в левую полость цилиндра 7 и удерживает корпус 9 в левом крайнем положении. Далее через левый отвод цилиндра 7 и левый обратный клапан 25 воздух поступает к золотникам 11 и 10. Через золотник 10 воздух поступает в нижнюю полость цилиндра перемещения захвата и удерживает захват в верхнем положении. Через золотник 11 воздух поступает к правой полости корпуса Я правую скалку 14, правое сверление в траверсе в нижнюю полость цилиндра 21 и держит захват разжатым.
При поступлении сигнала «захватить деталь включается электромагнит 1Э золотника 10 и перебрасывает его вправо. Верхняя полость цилиндра перемещения захвата через золотник 23, левую полость цилиндра 7, левый клапан 25 и золотник 10 сообщается с давлением, а нижняя полость через золотник 10 - с атмосферой.
Захват опустится на деталь. В конце хода сработает электрический конечник, включит электромагнит 2Э золотника //и перебросит его вправо. Воздух через золотник 23, левую полость цилиндра 7, левый обратный клапан 2, золотник 11, левую полость корпуса 9, левую скалку 14 и левое сверление в траверсе 15 попадает в верхнюю полость цилиндра 21, нижняя полость которого сообщится с атмосферой через золотник 11. Поршень цилиндра пойдет вниз, повернет против часовой стрелки рычаг 16, последний через ролик и ось 18 повернет рычаг 17 по часовой стрелке. Произойдет зажим детали. В конце зажима возрастет давление, сработает реле давления 12, включит электромагнит ЗЭ, золотника W и поднимет захват с деталью.
В конце хода сработает электрический конечник и включит электромагнит 4Э золотника 23. Он перебросится вправо и соединит с давлением правую полость цилиндра 7, а левую - с атмосферой. Цилиндр с кареткой 4 и захватом с деталью соверщит ход вправо до упора. В конце хода кулачок наскочит на
ролик тормозною золотника 24 и утопит егО. Произойдет понижение скорости за счет дросселирования воздуха на выходе, и каретка плавно дойдет до упора. В конце хода от
электрического конечника сработает электромагнит 1Э и перебросит вправо золотник 10. Сжатый воздух через золотник 23, теперь уже через правую полость цилиндра 7, правый отвод и правый обратный клапан 25, далее через золотник 10 попадет в верхнюю полость цилиндра перемещения захвата, а нижняя полость соединится с атмосферой. Произойдет опускание захвата с деталью. В конце опускания от электрического конечника включится
электромагнит 5Э. Перебросится влево золотник 11. Воздух через золотник 23, правую п:олость цилиндра 7, правый клапан 25, золотник 11, правую полость корпуса 9, правую скалку 14, правое сверление в траверсе 15
попадет в нижнюю полость цилиндра 21. Произойдет разжим захвата и деталь останется лежать на новой позиции.
В конце хода разжима захвата от электрического конечника сработает электромагнит
ЗЭ золотника 10. Захват без детали уйдет вверх. В конце хода вверх от электрического конечника сработает электромагнит 6Э, перебросив золотник 23 в левое крайнее положение. Цилиндр 7 с кареткой и захватом соверщит ход влево до упора в исходное поло кение.
Предмет изобретения
1.Автооператор, выполненный в виде каретки, перемещаемой по балке первым гидроцилиндром, управляемым золотниками, и снабженной траверсой, несущей захват, перемещаемый вторым гидроцилиндром, отличающийся тем, что, с целью упрощения конструкции, золотник управления первым гидроцилиндром через свои полости, дополнительные отводы и систему обратных клапанов соединен
с линией питания золотников управления вторым гидроцилиндром.
2.Автооператор по п. 1, отличающийся тем, что золотник управления вторым гидроцилиндром соединен через полости в корпусе
каретки и каналы в управляющих скалках и траверсе с золотником управления гидроцилиндром зажима - разжима захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| йи;ЕСОЮЗНАЯ | 1973 |
|
SU374071A1 |
| Автооператор к сферошлифовальному станку | 1955 |
|
SU112457A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1698035A1 |
| Устройство для переключения передач при стендовых испытаниях коробок перемены передач | 1990 |
|
SU1827561A1 |
| Гидравлическое устройство управления коробкой передач с двумя сцеплениями транспортного средства | 1983 |
|
SU1184702A1 |
| Пресс-автомат для прессования изделий из металлического порошка | 1975 |
|
SU521146A1 |
| Автооператор для установки в патрон круглошлифовального станка внутренних колец конических роликоподшипников | 1951 |
|
SU96001A1 |
| Автооператор | 1978 |
|
SU860998A1 |
| Устройство для сверления отверстий | 1960 |
|
SU142855A1 |
| УСТРОЙСТВО для ПРОТАЛКИВАНИЯ НЕЗАОСТРЕН ЗАГОТОВКИ В ВОЛОКУ ВОЛОЧИЛЬНОГО СТАНАБИ В г^'-•:.'")'I'jl^^f* V,. • | 1972 |
|
SU338280A1 |