Известны электрогидравлические следящие устройства с шаговым приводом, выполненные в виде нагового электродвигателя, соединенного с ходовым винтом, воздействующим через щун на золотник с исполнительным цилиндром.
Описываемое устройство позволяет получать большую скорость и высокую точность перемещения исполнительного органа.
Это достигается тем, что ходовой винт кинематически связан с дополнительным ходовым винтом, имеющим другой шаг резьбы, а щуп выполнен двусторонним и попеременно взаимодействует с винтовой поверхностью одного из ходовых винтов посредством механизма переключения с блокирующим устройством.
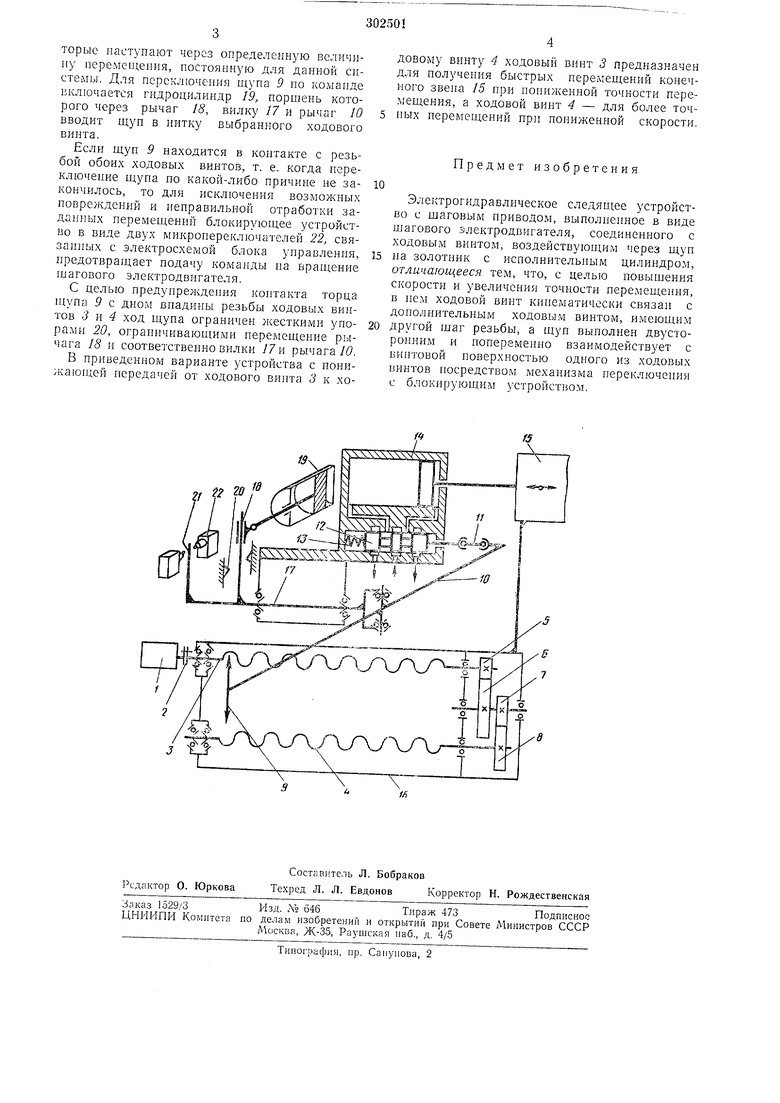
На чертеже изображена кинематическая схема электрогидравлического устройства.
Шаговый электродвигатель 1 соединен жесткой муфтой 2 с ходовым винтом 3, который кинематически связан с ходовым винтом 4 зубчатыми передачами 5-8.
Щуп 9, контактирующий с винтовой поверхностью одного из ходовых винтов, установлен на одном конце двуплечего рычага 10, а другой конец рычага через палец 11 щарнирно соединен со следящим золотником 12, имеющим нружину 13 и подающим команду на исполнительный цилиндр 14, шток которого жестко связан с конечным звеном 15, закрепленным на корпусе 16.
Рычаг 10 щарнирно соединен с вилкой 17, на которой жестко установлен рычаг 18, соединенный со штоком гндроцнлиндра 19 переключения, движение которого ограничено жесткими упорами 20. Блокирующее устройство содержит рычаг 21, жестко установленный на вилке 17, и два микропереключателя 22.
Устройство работает следующим образом. Щун 9 постоянно прижимается пружиной 13 к боковому профилю резьбы ходового винта, и при неподвижных ходовых винтах 3 и 4 следящая система находится в согласованном
(равновесном) состоянии. В этом случае конечное звено 15 неподвижно, и для его перемещения шаговый электродвигатель по сигналу с блока управления поворачивается на требуемый угол с заданной скоростью, новорачивая ходовые винты 3 и 4 на соответствующие углы. В результате этого происходит рассогласование следящей системы, вызывающее перемещение поршня исполнительного цилиндра 14, конечного звена 15, корпуса 16
и ходовых винтов 3 и 4 до наступления согласованного состояния.
Команды на переключение щупа 9 следуют в моменты совпадения витков резьбы ходовых винтов 3 к 4 с плоскостью, проходящей через
торыс наступают через определенную величину перемещения, постоянную для даппой системы. Для переключения щупа 9 по комапде включается гидроцилиндр 19, поршень которого через рычаг 18, вилку /7 и рычаг 10 вводит щуп в нитку выбранного ходового винта.
Еслп щуп 9 находится в контакте с резьбой обоих ходовых винтов, т. е. когда переключение щупа по какой-либо причине не за ончилось, то для исключения возможных повреждений и неправильной отработки заданных перемещений блокирующее устройство в виде двух микропереключателей 22, связанных с электросхемой блока управления, предотвращает подачу команды па вращение щагового электродвигателя.
С целью предупреждения контакта торца niyna 9 с дном впадины резьбы ходовых винтов 3 и 4 ход щупа ограничен л есткими упорами 20, ограничивающими перемещение рычага 18 и соответственно вилки /7 и рычага 10.
В приведенном варианте устройства с понижающей передачей от ходового винта 3 к ходовому винту 4 ходовый винт 3 предназначен для получения быстрых перемещений конечного звена 15 при пониженной точности перемещения, а ходовой винт 4 - для более точных перемещений при пониженной скорости.
Предмет изобретения
Электрогидравлическое следящее устройство с шаговым приводом, выполненное в виде щагового электродвигателя, соединенного с ходовым винтом, воздействуюнщм через щуп
па золотник с исполнительным цилиндром, отличающееся тем, что, с целью повышения скорости и увеличения точности перемещения, в пем ходовой винт кинематически связан с дополнительным ходовым винтом, имеющим
другой щаг резьбы, а щуп выполнен двусторонним и попеременно взаимодействует с винтовой поверхностью одного из ходовых винтов посредством механизма переключепия с блокирующ.им устройст юм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический следящий привод | 1987 |
|
SU1498982A1 |
| Следящее устройство для управления исполнительным гидродвигателем | 1980 |
|
SU958723A1 |
| Гидравлический следящий привод | 1981 |
|
SU1015129A1 |
| ВПТб | 1973 |
|
SU398353A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Пневмогидравлический следящий привод | 1980 |
|
SU876376A2 |
| Способ управления электрогидравлическим следящим приводом | 1992 |
|
SU1834994A3 |
| МЕХАНИЧЕСКАЯ РУКА | 1969 |
|
SU247753A1 |
| ГИДРАВЛИЧЕСКАЯ ПРОХОДНАЯ СТРОГАЛЬИАЯ МАШИНА | 1964 |
|
SU164922A1 |
| РЕЗЬБОТОКАРНЫЙ ПОЛУАВТОМАТ С НЕРЕВЕРСИВНЫМ ШПИНДЕЛЕМ | 1969 |
|
SU241904A1 |
