Изобретение относится к гидроавтоматике и может быть использовано в гидросистемах станков с числовым программным управлением.
I
Цель изобретения - повышение точ- нэсти за счет гашения накопленной ошибки. На фиг. 1 изображен гидравлический следяш,ий привод; на фиг. 2 - положения и.упа до и после разворота задающего винта.
Привод содержит задаюш,ий винт 1, снабженный опорой 2 враш.ения и по меньшей ере одним многопозиционным фиксатором, данном случае, например, двумя винтами и 4, выполненный с резьбой трапецеидаль- фго сечения и соединенный с шаговым лектродвигателем, и выходным элементом сполнительного гидродвигателя (не изображены) .
Золотник 5 размеш.ен в неподвижной ильзе 6 и кинематически связан с рабо- ей ниткой 7 винта 1 через тягу 8 и подпру- (иненный промежуточный рычаг 9, с рабо- им ш,упом 10, установленный с возможностью поворота на неподвижном кроншйне 11, на котором установлен с возмож- иостью поворота уравновешиваюший вспо- огательный рычаг 12 с нерабочим шу- юм 13, опертым на нерабочую нитку 14 5инта 1. Винт 1 имеет возможность пово- юта на опоре 4 в плоскости, проходящей 1ерез оси винта 1 и щупов 10 и 13.
Привод работает следуюшим образом.
При подаче входного сигнала на шаговый электродвигатель последний вращает задающий винт 1 и с помощью рабочей нитки 7 через щуп 10 рычаг 9, тягу 8 сдвигает золотник 5. Последний создает перепад давлений на исполнительном гидродвигателе, выходной элемент которого, перемещаясь, возвращает задающий винт 1 и, следова- |тельно, золотник 5 в исходное положение. |При этом исполнительный гидродвигатель отслежив 1ет заданное перемещение и одно
Q
5
Q
5
0
5
0
временно накопленную погрещность задающего винта 1.
Путем разворота задающего винта 1 на определенный.угол ф вокруг опоры 4 вращения уменьщается накопленная погрещность задающего винта , отслеживаемая исполнительным гидродвигателем. 00 - ось задающего винта до разворота, О ось задающего винта после разворота на угол ф (фиг. 2). Смещение задающего винта при этом приводит к смещению щупов 10 и 13 по профилю винтовой поверхности в радиальном направлении на величину А. Одновременно щупы 10 и 13 смещаются вдоль оси винта 1 на величину б, которая и есть величиной уменьщения накопленной погрещности, при этом АА - ось рабочего щупа 10 до смещения, А А - после смещения.
После разворота задающий винт 1 фиксируется в выбранном положении винтами 3 и 4.
Формула изобретения
Гидравлический следящий привод, содержащий задающий винт, соединенный с щаговым электродвигателем и выходным элементом исполнительного гидродвигателя, и золотник, размещенный в неподвижной гильзе и кинематически связанный с рабочей ниткой задающего винта через тягу и подпружиненный промежуточный рычаг со щупом, установленный с возможностью поворота на неподвижном кронштейне, на котором установлен с возможностью поворота вспомогательный рычаг со щупом, опертым на нерабочую нитку задающего винта, отличающийся тем, что, с целью повышения точности за счет гашения накопленной ошибки, задающий винт снабжен опорой вращения для поворота в плоскости, проходящей через оси винта и щупов, а также по меньщей мере одним многопозиционным фиксаторам и выполнен с резьбой трапецеидального сечения.
О
70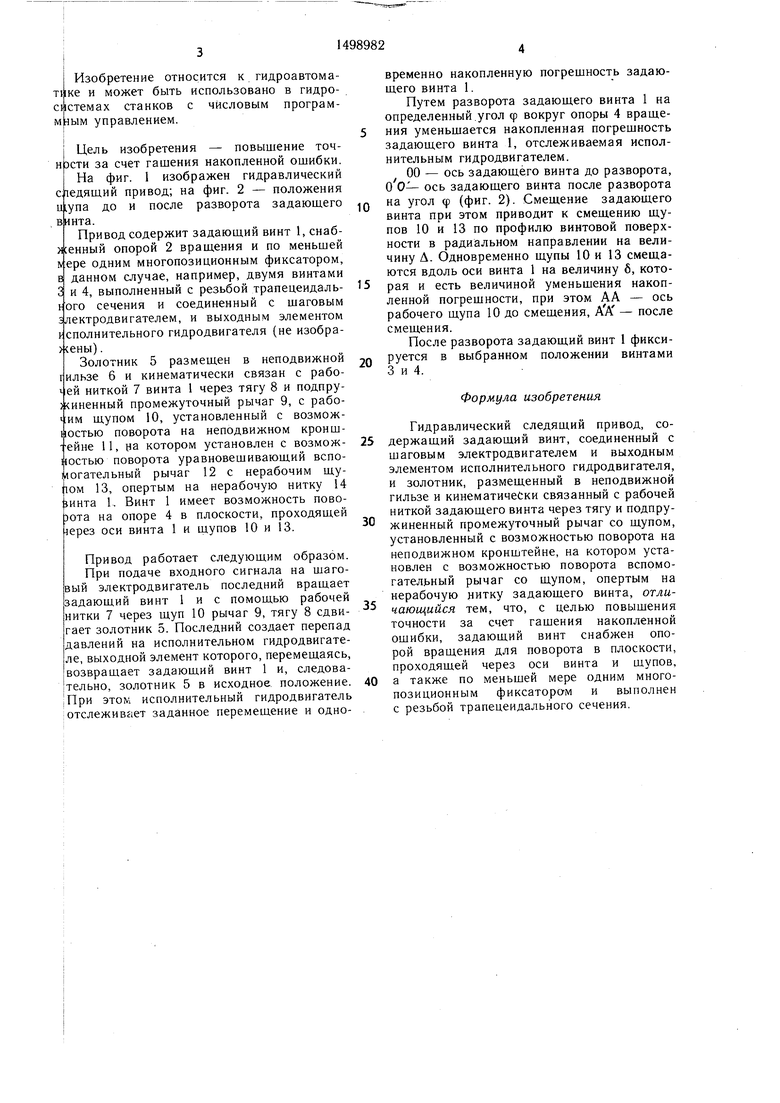
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящее устройство для управления исполнительным гидродвигателем | 1980 |
|
SU958723A1 |
| Следящее устройство для управления исполнительным гидродвигателем | 1986 |
|
SU1384841A2 |
| Гидравлический следящий привод | 1987 |
|
SU1413305A1 |
| Гидравлический следящий привод | 1982 |
|
SU1130049A1 |
| Ощупывающее устройство гидравлического следящего привода | 1980 |
|
SU953282A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО С ШАГОВЫМ ПРИВОДОМ | 1971 |
|
SU302501A1 |
| Гидравлический следящий привод | 1981 |
|
SU1015129A1 |
| Гидравлический следящий привод | 1985 |
|
SU1285222A1 |
| РЕЗЬБОТОКАРНЫЙ ПОЛУАВТОМАТ С НЕРЕВЕРСИВНЫМ ШПИНДЕЛЕМ | 1969 |
|
SU241904A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
Изобретение может быть использовано в гидросистемах станков с числовым программным управлением. Цель изобретения - повышение точности следящего привода за счет гашения накопленной ошибки. Задающий винт /В/ 1 соединен с шаговым электродвигателем и выходным элементом исполнительного гидродвигателя. Золотник 5 размещен в неподвижной гильзе 6 и кинематически связан с рабочей ниткой 7 В 1 через тягу 8 и подпружиненный промежуточный рычаг 9 с щупом 10. Рычаг 9 установлен с возможностью поворота на не подвижном кронштейне 11, на котором установлен с возможностью поворота вспомогательный рычаг 12 с щупом 13. Щуп 13 оперт на нерабочую нитку 14В 1. В 1 снабжен опорой 4 вращения для поворота в плоскости, проходящей через оси В 1 и щупов 10, 13. В 1 снабжен многопозиционным фиксатором и выполнен с резьбой трапецеидального сечения. 2 ил.
Фиг.1
| Следящее устройство для управления исполнительным гидродвигателем | 1980 |
|
SU958723A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
