Изобретение относится к области сварки JH может быть, использовано преимущественно при сборке и сварке металлокерамических контактов, со стойками.
Известны установки для сборкИ; и сварки изделий, содержащие машину, для- контактной: точечной, сварки, установленные на станине механизмы подачи свариваемых деталей транспортирующий механизм и механизм ориентации свариваемых деталей. Однако- зтиуст.ановки, имеют низкую производительность,, И- в них отсутствует, устройство, для контроля формы, подаваемых деталей и их комплектности.
Предложенная, установка отличается тем, 4то транспорт.ирующий, механизм выполнен. в виде, планетарной передачи;с закрепленными, на. осях его сателлитов многопозиционными, захватами, и водилом с криволинейными профилями торца и периферии. Перадача обеспечивает перемещение деталей, по. циклоидальной- траектории, в точках возврата- которой размещены кинематически связанные с, захватами механизм подачи свариваемых детдлей, м.еханизм их ориентации и мап1ина для контактной точечной сварки.
Механизм подачи, стоек, выполнен в.виде скобы, шарнирно установленной в ползуне. Ползун, размещен, в корпусе с возможностью продольного перемеще,ния. и взаимодействует
с криволинейным профилем периферии водила. На одиом. конце скобы установлен регулируемый упор, против которого на указанном, к-орпусе, смонтирован шаблон, а на другом. HiecTKO закреплена находящаяся в зацеплении с зубчатой рейкой: на том же корпусе шестерня. На оси шестерни установлен подпружиненный от скобы, плун.жер, который опирается на: каретку, установленную с возможностью. продольного перемещения в направляющих щарнирно закрепленного и подпружиненного от. корпуса рычага, взаимодействующего с криволинейным профилем торца водила.
Кроме того, механизм, ориентаци свариваемых деталей выполнен в виде установленных, на. с,оответ,ству.ющем корпусе подпружиненных параллельных призм с сигнальными флажками, воздействующими на датчики положения. Такое выполнение обеспечивает повышение производительности и надежности установки.
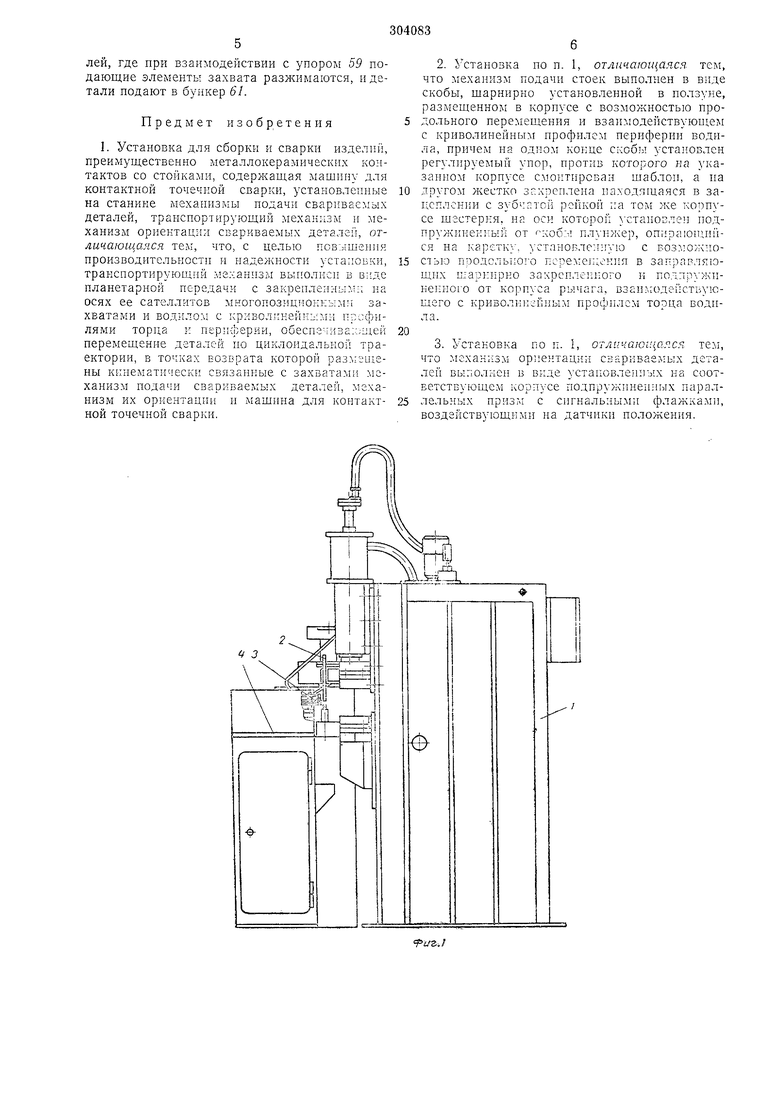
На фиг. 1 изображена установка, общий вид; на фиг. 2 - то же в плане; на фиг. 3 -
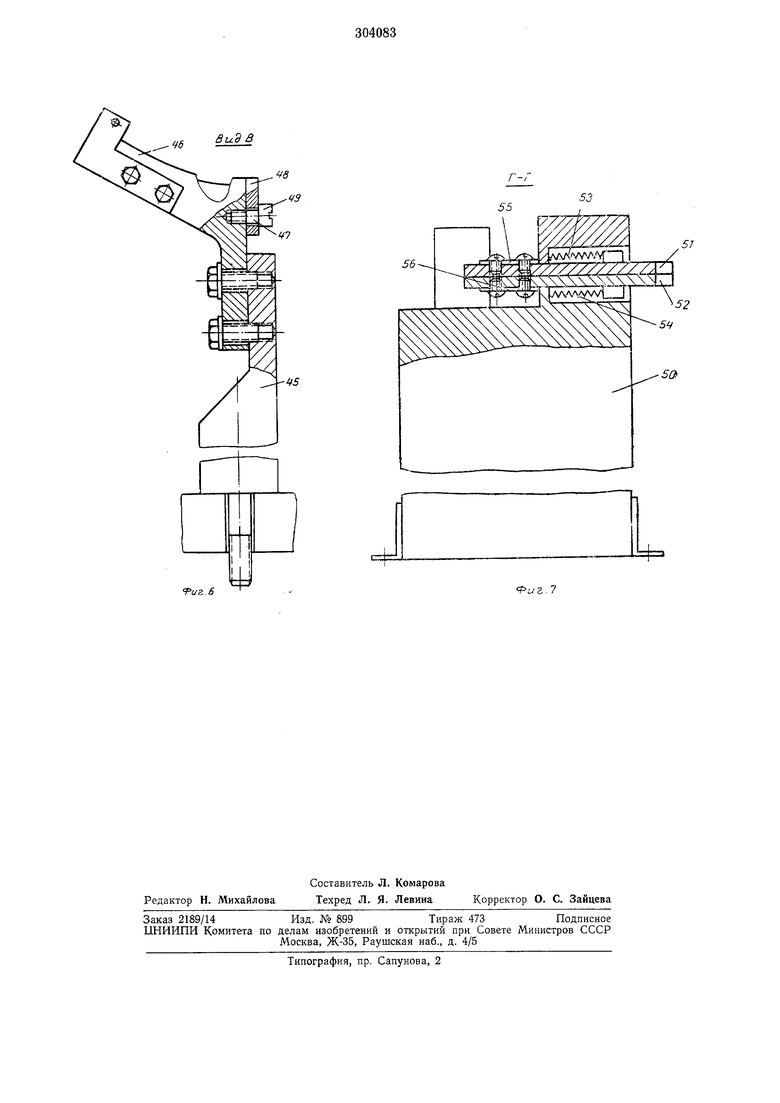
то же,,вид,спереди с разрезом по транспортирующему механизму; на фиг. 4-разрез по А-А на фиг. 2; на фиг.. 5 - разрез по Б-Б на фиг. 4; на фиг. 6 - вид по стрелке В на фиг. 2 с частичным разрезом; на фиг. 7 - разУстановка включает машину / для точечной контактной сварки с нодвижным 2 и неподвижным 5 электродами и станину 4, к которой нрикреплен электродвигатель 5, соединенный клнноременной передачей 6 с редуктором 7. На валу редуктора закреплено выполненное с профилями 8 и 9 водило 10 планетарной передачи, состоящей из неподвижной соляной шестерни (на чертеже не показана) и находяп.и-1хся в зацеплении с ней и закрепленных шарнирно па водиле паразитных шестерен, в свою очередь, находяш,ихся в зацеплении с сателлитами (на чертеже не показаны). На осях 11 сателлитов закреплены мпогопозицнонные захваты J2, снабженные поднружннепными штоками 13, несушими коромысла 14 с фиксаторами 15 стоек в захватах. На станине 4 под штоками 13 закреплены управляюшпе ролики 16.
Устаповка спабжена вибропрнводом 17, на грузонесушем органе 18 которого соосно закреплепы один над другим бункеры 19 и 20 соответственно для подачи стоек и контактов. Бункеры соединены с механнзами подачи свариваемых деталей подводящими лотками 2} и 22.
Н-а етанине 4 вокруг водила 10 (см. фиг. 2) y.Cfr,H, механизмы 23-26 соответственно .- юдачи стойки, подачи контакта, ориентации свариваемых деталей и удаления из захвата некомплектпых деталей.
Механизм 23 состоит из установленного в горизонтальных направляющих 27 качения корпуса 28 и поджатого пружиной 29 ползуна 30. В нолзуне шарнирно закреплена скоба 31. В верхней части скобы установлен регулируемый унор 32, а в нижней части жестко закреплена шестерня 55, находящаяся в зацеилепии с неподвижно закрепленной на корпусе рейкой 34. На оси шестерни 55 установлен плунжер 55, поджатый пружиной 36. К корпусу 28 прикреплен щаблон 57. Нлунжер 55 опирается на каретку 55, снабженную роликами 55. Каретка подвижно установлена на рычаге 40, поджатом пружиной 41 через конус 42. Через ролики 43 и 44 ползун 30 и рычаг 40 соприкасаются с криволинейными профилями 8 и 9 водила планетарной передачи.
Механизм 24 состоит из прикрепленного к стойке 45 летка 46, па конце которого шариирпо посажен на горизонтальной оси 47 вертикальный зуб 48, поджатый пру киной 49.
Механизм 25 состоит из неподвижно укрепленного на станине корнуса 50, несущего набор параллельных призм 51 и 52, поджатых соответственно иружинами 55 и 54 и перемещающихся в горизонтальных наиравляющих независимо друг от друга. К призмам 51 и 52 прикреплены соответственно сигнальные флажки 55 и 56, помещенные в прорезях датчиков 57 и 58 положеиия, прикрепленных к icopnycy 50.
но отверстие 60 для сброса деталей в бункер 61.
Работает установка следующим образом. При включении электродвигателя 5 вращение через передачу 6 и редуктор 7 сообщается водилу 10 планетарной передачи. При этом захваты 12 вращаются одновременно вокруг своей оси и оси водила. Раз.меры и параметры шестереи передачи подобраны таким образом,
что детали, находящиеся в захватах, перемещаются по замкпутой гииоциклоидальной траектории. Захваты последовательно проходят через механизмы 23 и 24, захватывая на первом стойку, а на втором - контакт.
Механизм подачи стойки работает следующим образом. Из бункера 19 стойки ио лотку 22 поступают к позиции выдачи стойки. Под действием профиля 8 периферии водила ползун 30 перемещается по направляющим 27.
При этом шестерпя 55, взаимодействуя с рейкой 34, вращается вокруг своей оси. Рыча 40 иод действием профиля 9 поворачивается вокруг своей оси и через каретку 5S иеремещает плунжер 55. В крайнем положении илунжер, поднимаясь, прижимает к уиору 32 очередиую стойку. Затем ползун 30 перемещается к водилу 10, а скоба 5/, вращаясь, ироносит зажатую между плунжером 55 и упором 32 стойку через щель шаблона 57 и плавно перемещает ее в положение для захвата ее подающими элементами захватов 12. В случае поступления неправильной но форме детали она под действием щаблоиа отклоняется от положення, в котором производится захват
ее подающими элемеитами захватов, и при последующе- опускании плупжера 55 поступает под действием собственного веса в накопитель браковаииых деталей. На иозиции выдачи контакта поступающие
из бункера 20 по лотку 21 детали упираются в зуб 48. При подходе захвата 12 к позиции его подающие элементь;, отодвигая зуб 48, защелкиваются вокруг одного контакта и отходят от позиции. При этом зуб возвращается
в исходное вертикальное нолол ение, замыкая выход из лотка. Находящиеся в захвате детали приводятся в соприкосновеиис с призмами 51 и 52 и механизма ориентации, npii этом детали благодаря ирямоугольно-му вырезу иа
концах призм центрируются относительно друг друга, и осун;ествляется контроль наличия в захвате обоих свар;:ваемь;Х деталей.
От коитрольной позиции детали подаются на сварочную позицию н зажимаются электродами 2 и 5. Захваты 12 отходят от электродов, и через заданный промежуток времени включается сварочная машина. Но окончании сварки электроды разжимают CBapeiiHbte детали, которые иод действием собствс} ного
веса надают в бункер готовой продукции, находящийся нод иозиц1щией сварки. При отсутствии одиой из свариваемых деталей jio сигналу от контрольной позиции сварочная машина не срабатывает, а захват перемещаетлей, где при взаимодействии с упором 59 подающие элемепты захвата разлей маются, и детали подают в бункер 61.
Предмет изобретения
I. Установка для сборки и сварки изделий, преимущественно металлокерамических контактов со стойками, содержащая мап:ину для контактной точечной сварки, установленные на стаиике механизмы нодачи свариваемых деталей, транспортирующий механизм и : ieхаиизм ориентации свариваемых деталеГ;, отличающаяся тем, что, с целью пов:яшен11я производительиости и надежности установки, траисиортирующнй механизм выполнен в виде планетарной передачи с закреплеиньг).п; на осях ее сателлитов многонозициоккымп захватами и водилом с кривол11нейнь:ми прсфилями ториа к иериферии, о5есиемива:с;1ией перемещение деталей но циклоидальной траектории, в точках возврата которой раз,1ещены кинематически связанные с захватами люханизм иодачи свариваемых деталей, механизм их ориентации и машина для контактной точечной сварки.
Ч 3
6 1,
2.Установка по п. 1, отличающаяся тем, что механизм нодачи стоек выполнен в виде скобы, шарнирно установленной в ползуне, размещенном в корпусе с возможностью продольного перемещения и взаимодействуюитем с криволинейным ирофилем периферии водила, причем на одном конце скобы установлен регулируемый упор, против которого на указаииом корпусе смоитирован шаблоп, а на другом жестко зг.хреплеиа находящаяся в зацеплении с зубчатой рейкой па том же корпусе шестерня, на оси которой установлен подпружиненный от кобм пллнжер, onripaiomniiся па каретку, установлелиую с Б0з:-,ож;10стью ноодсльиого псремеи:ення в заправляющих шарнирно закрепленного и подпружиненного от корнуса ры.чага, взаимоде1;ству сшего с криволинейным профилем торца водила.
3.Установка по п. i, отличающаяся тем, что механизм ориентацией свариваемых деталей выиолнеи в виде уетаиовлениых па соответствующем корпусе подпружинеи И51х параллельных нризд с сигнальными флажками, воздействующими на датчнки положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сварочная головка для автоматической сварки криволинейных элементов | 1983 |
|
SU1159747A1 |
| Устройство для автоматической сварки криволинейных элементов | 1982 |
|
SU1041252A1 |
| Устройство для автоматической сварки криволинейных швов | 1980 |
|
SU887103A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Устройство Проскурова В.С. для чистовой обработки конических поверхностей | 1986 |
|
SU1551524A1 |
| МАШИНА ДЛЯ КОНТАКТНОЙ РЕЛЬЕФНОЙ СВАРКИ ^СЕСОЮоНАЯТмТ?ИТ1Ш-=ТЕ1Ш1?ОНМ| | 1972 |
|
SU331858A1 |
| Стенд для сборки под сварку изделий | 1978 |
|
SU770713A1 |


t
гО 5
ет7//т ./ X CMfS, у
Вид 8
8
fuz.B
56
1ф.
Риг. 7
