Известны датчики положения рабочего органа к землеройно-транснортной машине, нанример к экскаватору-дреноукладчику. включающие корнус, валик, оноры и щуп.
Однако такие датчики не обеспечивают достаточной стене1Н1 точности поддержания заданного иоложения рабочего органа.
Предлагаемый датчик не имеет этого недостатка и отличается от извест1Нз х тем, что на j opnyce датчика смонтирован уравновешенный ноередством контргруза кроннпейн, на конце которого закренлена дополнительная онора. Через носледнюю пронуш:ен вал, од1П1М конном соединенный ноередством .муфты с валиком датчика, а другим - со HiyriOM.
1-1зобретение поясняется чертежом.
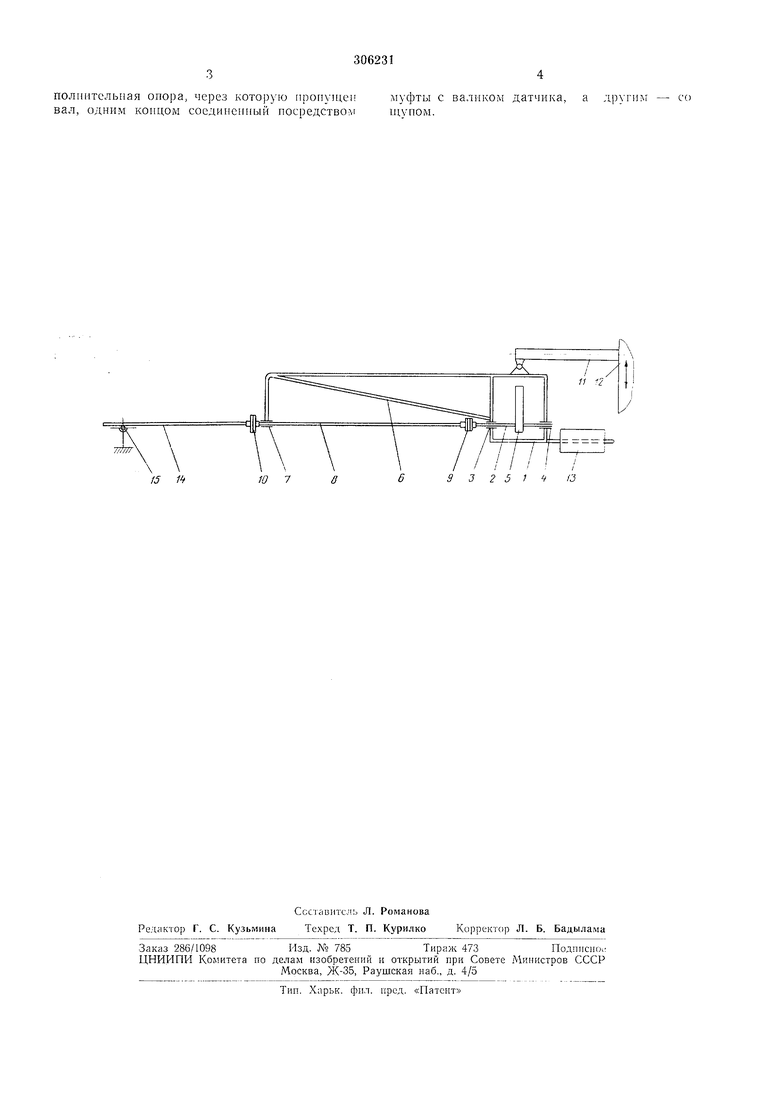
В корпусе .1 датчика на валике 2, установленном на двух нодшипниковы.к опорах i и 4, жестко закреплены сигнальные элеме)ты 5. К корнусу датчика жестко нрикренлеи выносной кронштейн 6 с расположеипо11 на ко1гце дополнительной подшипниковой опорой 7.
Вал 8 нередает вращение валику 2 через муфту 9. Заканчивается этот вал за опорой 7 флаицем 10.
рабочего органа J2 с номощью контргруза }3. К фланцу 10 вала 8 жестко прикреплен гцуп 14, который пмеет небольшую длину н вес, достаточный для нлотпого прижатия к копирному тросу 15, но не настолько больнюй.. чтобы прогибать его.
При подъеме или оиускаиии совместно с рабочнм органом 12 экскаватора кронштейн // поднимает или соответствсмшо онускает точку нодвески корнуса / датчика. Прп этом 14, оставаясь лежать па пеподвижпом коппрном тросе 15, поворачивает через фланец JO, ia:i 8 п муфту 9 валн.к 2 с закрепле)ными па нем сигпальпы.ми элементами 5.
Таким образом сигнал иоступает в систему, автоматизирующую выдерживание задапного уклона дна траншен.
П ) е д м о т и 3 о б р е т е н н я
Датчик положенпя рабочего opiana к землеройно-транспортпой маппше, нанри.мер к экскаватору - дреноукладчику, включающий корпус, валик, оноры п Н1ун, отличающийся тем, что, с целью новьнце1Н1я стенепп точности поддержання заданного положенпя рабочего органа, на корпусе датчика смоитироваи уравновешенный ноередством контргруза кронштейи. на конце которого закреплена до9 3 2 5 1 { 13
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| Датчик положения рабочего органа землеройной машины | 1984 |
|
SU1239232A2 |
| ДРЕНОУКЛАДЧИК | 1971 |
|
SU305243A1 |
| ЭКСКАВАТОР-ДРЕНОУКЛАДЧИК | 1971 |
|
SU319251A1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ ПРЕЖДЕВРЕМЕННОЙ | 1971 |
|
SU321601A1 |
| Роторный траншейный экскаватор | 1954 |
|
SU104698A1 |
| ТЕЛЕЖКА ЖЕЛЕЗНОДОРОЖНОГО ЛОКОМОТИВА | 1972 |
|
SU357109A1 |
| СПОРА' ВАЛА | 1973 |
|
SU399643A1 |
| Датчик положения рабочего органа землеройной машины | 1985 |
|
SU1313976A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯДОПУСТИМЫХ ДИНАМИЧЕСКИХ НАГРУЗОК НА ПРИВОДРАБОЧЕГО ОРГАНА РОТОРНОГО ЭКСКАВАТОРА | 1972 |
|
SU422821A1 |