Изобретение относится к землеройным машинам, а именно к датчикам положения рабочего органа.
Цель изобретения - снижение трудоемкости установки копирного каната.
На фиг. 1 изображен датчик в аксонометрической проекции; на фиг. 2 - то же, вид сзади; на фиг. 3 - то же, вид сбоку.
Датчик содержит двуплечий кронштейн 1, который крепится к рабочему органу 2 посредством поворотной опоры 3.
На кронштейне 1 расположены контргруз 4 и механизм установки вертикального положения, СОСТОЯШ.ИЙ из горизонтальной штанги 5 и вертикальной штанги 6, котоном перемеш,ении горизонтальной штанги 5. В случае перемещения штанги 5, например, вниз рычаг 14 через соединительную тягу 15 удерживает от опускания правую
5 часть рычага 16, которая остается на прежней высоте. Одновременно при опускании горизонтальной штанги 5 опускается корпус измерителя 9, а контактная часть Г-образ- ного щупа 11 остается на прежней высоте, т. е. одновременно происходит поворот
10 корпуса измерителя 9 и Г-образного щупа 11, причем при равных радиусах рычагов 14 и 16 и Г-образного щупа 11 углы поворота корпуса измерителя 9 и щупа 11 будут равны и поворот их друг относирая установлена в вертикальной неподвиж- тельно друга будет отсутствовать, поэтому ной втулке 7 с возможностью перемещенияв переключающем устройстве измерителя 9
и фиксации друг относительно друга. Горизонтальная штанга 5 размещена под отвальным транспортером 8 и может перемещаться по вертикали параллельно себе и фиксироваться в нужном положении. На горизон- 20 тальной щтанге 5 закреплен измеритель 9 угловых перемещений. На выходном валике 10 измерителя закреплен поворотный Г-образный щуп 11. Контактная часть поворотного щупа 11 опирается на копирный канат 12, устанавливаемый на специальных колышках 13, заделанных в грунт через определенное расстояние.
25
На неподвижной вертикальной втулке 7 жестко закреплен рычаг 14, шарнирно соепри смещении его относительно отвального транспортера 8 выходной сигнал будет равен нулю, т. е. отпадает необходимость в перестановке копирного каната.
Формула изобретения
Датчик положения рабочего органа землеройной машины, включающий щарнирно расположенный на опоре двуплечий кронштейн, на одном конце которого установлен противовес, а на другом - втулка, в которой с возможностью перемещения и фиксации по высоте расположена вертикальная щтанга, соединенная с горизонтальной
диненный через тягу 15 с рычагом 16, .. штангой, на свободном конце которой закоторыи жестко закреплен на горизонтальной штанге 5. Горизонтальная штанга 5 выполнена поворотной в подшипнике 17, причем корпус подшипника закреплен неподвижно в нижней части вертикальной штанги 6.
Датчик работает следующим образом.
В зависимости от глубины копания положение рабочего органа 2 землеройной машины изменяется по высоте. Вертикальная штанга 6 вручную перемещается во втул35
креплен измеритель угловых перемещений, выходной поворотный валик которого жестко связан с Г-образным щупом с контактной частью для взаимодействия с копирным канатом, отличающийся тем, что, с целью снижения трудоемкости установки копирного каната, соединение щтанг выполнено в виде подшипника, корпус которого жестко связан с вертикальной штангой, а горизонтальная штанга расположена в подшипнике с возможностью поворота, при этом датчик снабке 7 и фиксируется так, чтобы горизон- 40 жен шарнирно связанными между собой
тальная штанга 5 не касалась транспортера 8.
Ввод компенсации смещения измерителя 9 относительно отвального транспортера 8 выполняется автоматически при вертикальдополнительной тягой и рычагами, которые соответственно жестко соединены с втулкой и горизонтальной штангой, при этом длина каждого рычага равна радиусу поворота (контактной части) Г-образного щупа.
ном перемеш,ении горизонтальной штанги 5. В случае перемещения штанги 5, например, вниз рычаг 14 через соединительную тягу 15 удерживает от опускания правую
5 часть рычага 16, которая остается на прежней высоте. Одновременно при опускании горизонтальной штанги 5 опускается корпус измерителя 9, а контактная часть Г-образ- ного щупа 11 остается на прежней высоте, т. е. одновременно происходит поворот
0 корпуса измерителя 9 и Г-образного щупа 11, причем при равных радиусах рычагов 14 и 16 и Г-образного щупа 11 углы поворота корпуса измерителя 9 и щупа 11 будут равны и поворот их друг относи тельно друга будет отсутствовать, поэтому в переключающем устройстве измерителя 9
при смещении его относительно отвального транспортера 8 выходной сигнал будет равен нулю, т. е. отпадает необходимость в перестановке копирного каната.
Формула изобретения
Датчик положения рабочего органа землеройной машины, включающий щарнирно расположенный на опоре двуплечий кронштейн, на одном конце которого установлен противовес, а на другом - втулка, в которой с возможностью перемещения и фиксации по высоте расположена вертикальная щтанга, соединенная с горизонтальной
штангой, на свободном конце которой за5
креплен измеритель угловых перемещений, выходной поворотный валик которого жестко связан с Г-образным щупом с контактной частью для взаимодействия с копирным канатом, отличающийся тем, что, с целью снижения трудоемкости установки копирного каната, соединение щтанг выполнено в виде подшипника, корпус которого жестко связан с вертикальной штангой, а горизонтальная штанга расположена в подшипнике с возможностью поворота, при этом датчик снабдополнительной тягой и рычагами, которые соответственно жестко соединены с втулкой и горизонтальной штангой, при этом длина каждого рычага равна радиусу поворота (контактной части) Г-образного щупа.
/2 П
Ю
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Устройство для подачи поддонов | 1980 |
|
SU899391A1 |
| Устройство для измерения глубины отверстий | 1981 |
|
SU973269A1 |
| Устройство для фасонной резки труб | 1977 |
|
SU683863A1 |
| Устройство для правки фасонного шлифовального круга | 1980 |
|
SU952557A1 |
| Устройство для разъема и сборки стержневого ящика | 1977 |
|
SU698716A1 |
| СТАНОК ДЛЯ ФАСОННОЙ РЕЗКИ ТРУБ | 1970 |
|
SU277710A1 |
| Ковш экскаватора-драглайна | 1987 |
|
SU1521835A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УЛАВЛИВАНИЯ ШТАНГ ТОКОПРИЕМНИКОВ ТРОЛЛЕЙБУСА | 2001 |
|
RU2209143C1 |
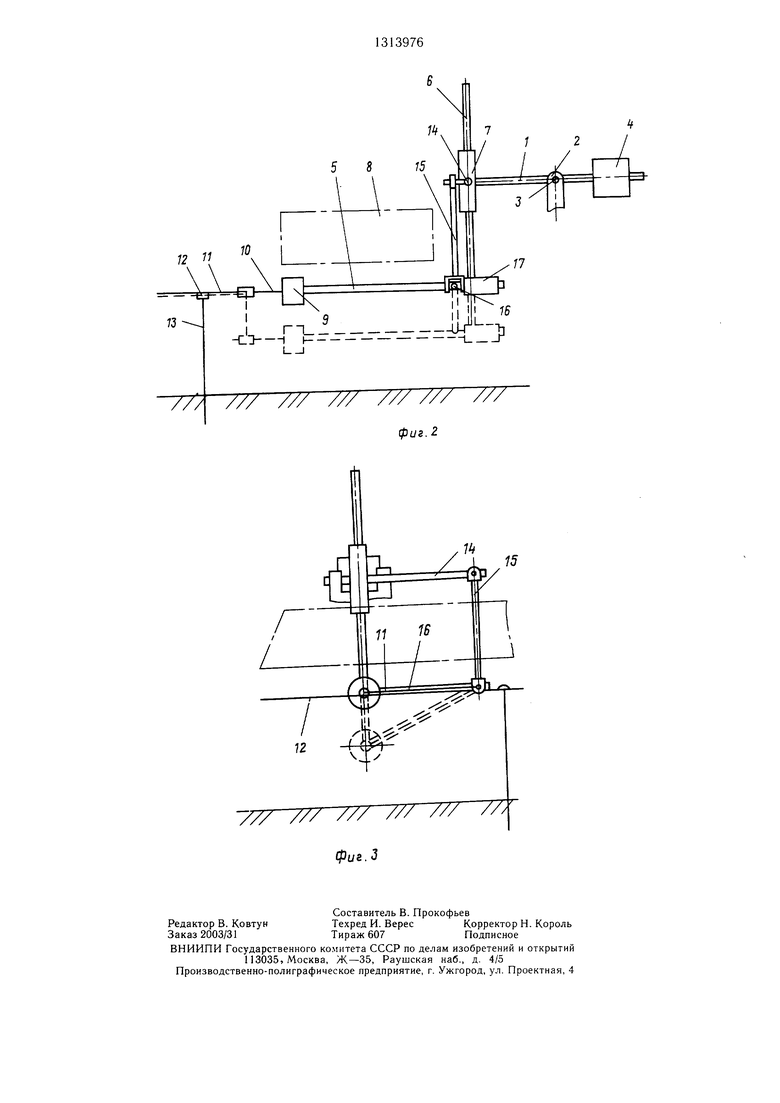
Изобретение относится к землеройной технике и позволяет снизить трудоемкость установки копирного каната 12. Датчик включает шарнирно расположенный на опоре двуплечий кронштейн 1. На одном его конце размеш,ен противовес 4, а на другом - втулка 7. В ней расположена подвижная вертикальная штанга ВШ 6, соединенная с горизонтальной штангой (ГШ) 5, имеюш.ей измеритель (И) 9 угловых перемещений на свободном конце. Выходной поворотный валик 10 И 9 жестко связан с Г-образньш ш.упом 11 с контактной частью для взаимодействия с канатом 12. На втулке 7 жестко закреплен рычаг 14, шарнирно соединенный через тягу 15 с рычагом 16, который жестко закреплен на ГШ 5. Длина каждого рычага 14, 16 равна радиусу поворота (контактной части) шупа 11. Соединение ГШ 5 и ВШ 6 выполнено в виде подшипника 17. Его корпус жестко связан с ВШ 6, а ГШ 5 размешена в подшипнике 17 с возможностью поворота. В ходе работы датчика ВШ 6 перемешается по высоте во втулке 7 и фиксируется так, чтобы ГШ 5 не касалась транспортера 8. При перемещении ГШ 5 вниз опускается и корпус И 9. В результате одновременно происходит поворот корпуса И 9 и шупа П. Углы их поворота при равных радиусах рычагов 14 и 16 равны. Поворот И 9 относительно шупа 11 будет отсутствовать и отпадает необходимость в перестановке каната 12. 3 ил. с iS ж X V СО со со С5
//А /// /// /// /// /
фиг. 2
15
фиг. J
Редактор В. Ковтун Заказ 2003/31
Составитель В. Прокофьев Техред И. ВересКорректор Н. Король
Тираж 607Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрическая лампа накаливания с двумя нитями | 1923 |
|
SU406A1 |
| Ветряный двигатель | 1922 |
|
SU553A1 |
| Брянский завод дорожных машин, 1983. | |||
