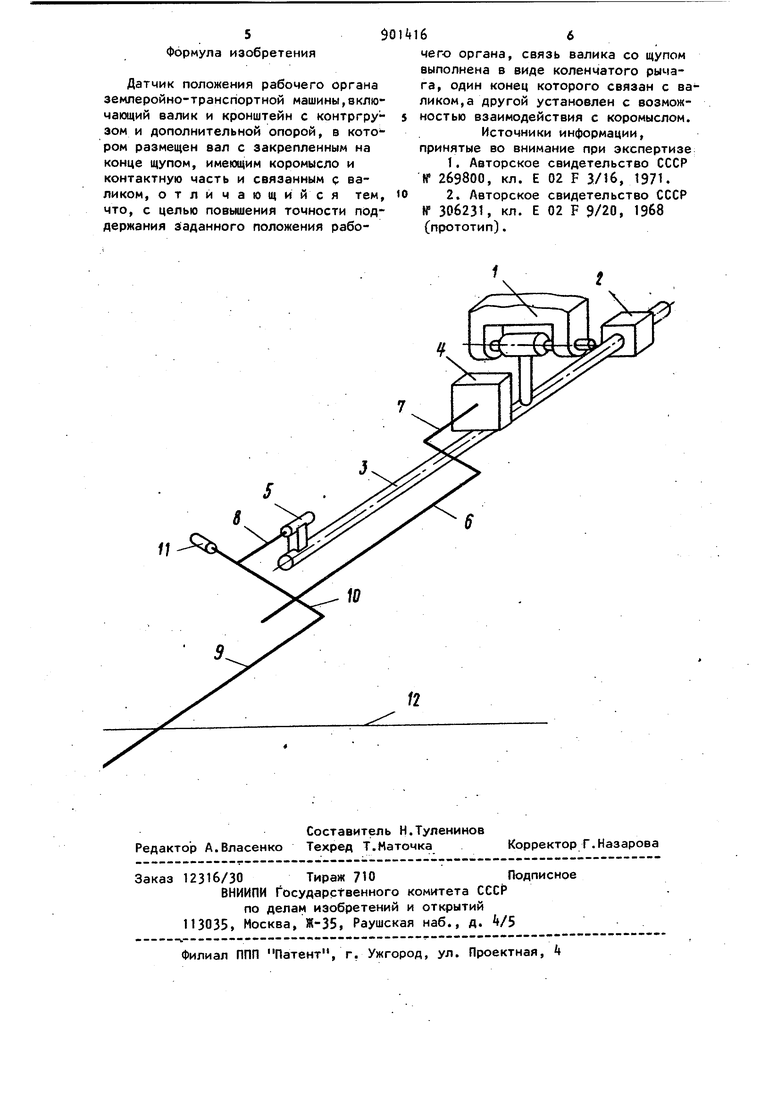
Изобретение относится к землеройной технике, в частности к Многол ковшовым траншейным дреноукладчикам с цепным рабочим органом и к бестран шейным дреноукладчикам с ножевым рабочим органом. Известен датчик высотного положения рабочего органа, подвешенный шар нирно на кронштейне рамы рабочего ор гана и состоящий из корпуса с электрическими переключателями и вала с коленчатым щупом, опирающимся на копирный трос р Недостатком этого датчика является то, что при значительной длине щу па отмечается недостаточная жесткост его конструкции и повышенный вес. Недостаточная жесткость конструкции приводит к значительным деформациям щупа и его колебаниям;., связанными с недопустимыми динамическими ошибками поддержания заданного положения рабочего органа. Повышенный вес щупа вызывает существенную статичёскую и динамическую нагрузки на копирный трюс и на подшипниковый узел датчика, способствующие увеличению сил трения, и, как следствие этого, снижению точности поддержания заданного положения рабочего органа. Наиболее близким техническим решением к предлагаемому изобретению является датчик положения рабочего органа землеройно-транспортной машины, включающий валик и кронштейн с контргрузом и дополнительной опорой f 2. Эта конструкция датчика позволяет уменьшить длину щупа и более равномерно распределить нагрузку на опоры. Однако недостатками датчика является то, что щуп его жестко соединен с валиком датчика посредством промежуточного вала, проходящего через дополнительную третью опору. Наличие жесткого трехопорногс вала в данной конструкции препятствует свободному повороту щупа при взаимных деформациях кронштеина и вала вследствие изменения температуры, действия инерционных помех, износа, ошибок при сборке и ремонте. Выполнение третьей опоры в виде сложного шарнира с большим числом степеней свободы для обеспечения свободного поворота вала при наличии деформаций, перекосов и биения вала затруднено из-за отсутствия надежных средств защиты подобных шарниров от грязи и пыли, Кроме этого, установка промежуточных муфт для соединения валов еще более усложняет практическую реали,зацию подобной конструкции, так как установка жестких муфт вызывает дополнительные перекосы валов, а свободные муфты приводят к появлению люфтов, которые при учете передаточного отношения от углового поворота вала к высотному перемещению контактной части щупа приводят к уменьшению точности поддержания заданного положения рабочего органа. Целью изобретения является повышение точности поддержания заданного положения рабочего органа. Поставленная цель достигается тем что датчик положения рабочего органа землеройно-транспортной машины,включающий валик и; кронштейн с контргруз м и дополнительной опорюй, а котором размещен вал с закрепленным на конце щупом, имеющим коромысло и контактную часть и связанным с валиком, связь валика со щупом выполнена в виде коленчатого рычага, один коне которого связан с валиком, а другой установлен с возможностью взаимодействия с коромыслом. На чертеже показан датчик во взаи модействии с рабочим органом 1 машин Устройство содержит контргруз 2, кронштейн 3 с установленным на нем чувствительным элементом и дополнительной опорой 5. Элемент k представляет собой сигнальное устройство и состоит из корпуса, закрепленного на кронштейне 3 и коленчатого рычага 6, установленного на валике 7 и способного повора чиваться относительно своей оси. В дополнительной подшипниковой оп ре 5 пропущен вал 8 с закрепленным н конце щупом 9, на коромысло 10 котор го опирается коленчатый рычгг 6 датч ка. Щуп 9 уравновешен грузом 11 для регулирования необходимого усилия пр жатия щупа к копирному тросу 12 и избежания его прогиба. Датчик работает следующим образом. При подъеме или опускании рабочего органа 1 соответственно поднимается или опускается шарнир с закрепленным в нем уравновешенным посредством контргруза 2 кронштейном 3 с установленными на нем элементом k и дополнительной опорой 5. При этом щуп 9, оставаясь лежать на неподвижном копирном тросе 12, поворачивает посредством коленчатого рычага 6 валик 7 датчика, в результате чего переключающее устройство элемента подает сигнал на включение исполнительного механизма. Действие исполнительного механизма приводит к вертикальному перемещению рабочего органа в направлении устра нения возникшего отклонения щупа оТ заданного положения. В предлагаемом датчике высотного полсйкения связь между валиком датчи ка и щупом выполнена в виде самоустанавливающегося механизма, использование которого приводит к уменьшению нагрузки на копирный трос и подшипниковый узел датчика. Это следует из того, что коленчатый рычаг 6, установленный на валике 7 датчика, опирается свободно на коромысло 10 щупа 9 и не вызывает тем самым дополнительных перекосов вала к появлению сил, препятствующих повороту шупа 9. Масса поворотной части щупа с опирающимся на него коленчатым рычагом 6 уравновешивается грузом 11 и поэтому дополнительная нагрузка от массы рычага 6 на копирный трос 12 не передается. При изменении размеров устройства, вызванных температурными деформациями, вибрациями, износом, имеющих место при эксплуатации землеройных машин, связь валика датчика со щупом, выполненных в виде самоустанавливающего механизма, не нарушает работу датчика высотного положения. Этим обеспечивается более высокая точность управления высотным положением рабочего органа. Использование датчика высотного положения снижает погрешность укладки дренажа, что позволит увеличить срок его службы и снижает эксплуатационные расходы при использовании дренажных систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения рабочего органа землеройной машины | 1984 |
|
SU1239232A2 |
| ДАТЧИК ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА К ЗЕМЛЕРОЙНО- ТРАНСПОРТНОЙ МАШИНЕ ДРЕНОУКЛАДЧИКУ12 | 1971 |
|
SU306231A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Устройство для слежения за высотным положением рабочего органа землеройной машины | 1984 |
|
SU1209782A1 |
| Датчик положения рабочего органа землеройной машины | 1985 |
|
SU1313976A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Устройство для управления положением рабочего органа землеройных машин | 1976 |
|
SU726277A1 |
| Устройство одновременного управления высотным и поперечно-угловым положениями рабочего органа землеройной машины | 1977 |
|
SU734353A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| Датчик вертикального положения рабочего органа землеройной машины | 1985 |
|
SU1625961A1 |
