Изобретение относится к землеройной технике, в частности к многоковшовым траншейным дреноукладчикам с цепным рабочим органом и к бестраншейным дреноукладчикам с ножевым рабочим органом и является усовершенствованием изобретения по авт. св. № 901416.
Целью изобретения является повышение точности поддержания заданного высотного положения рабочего органа.
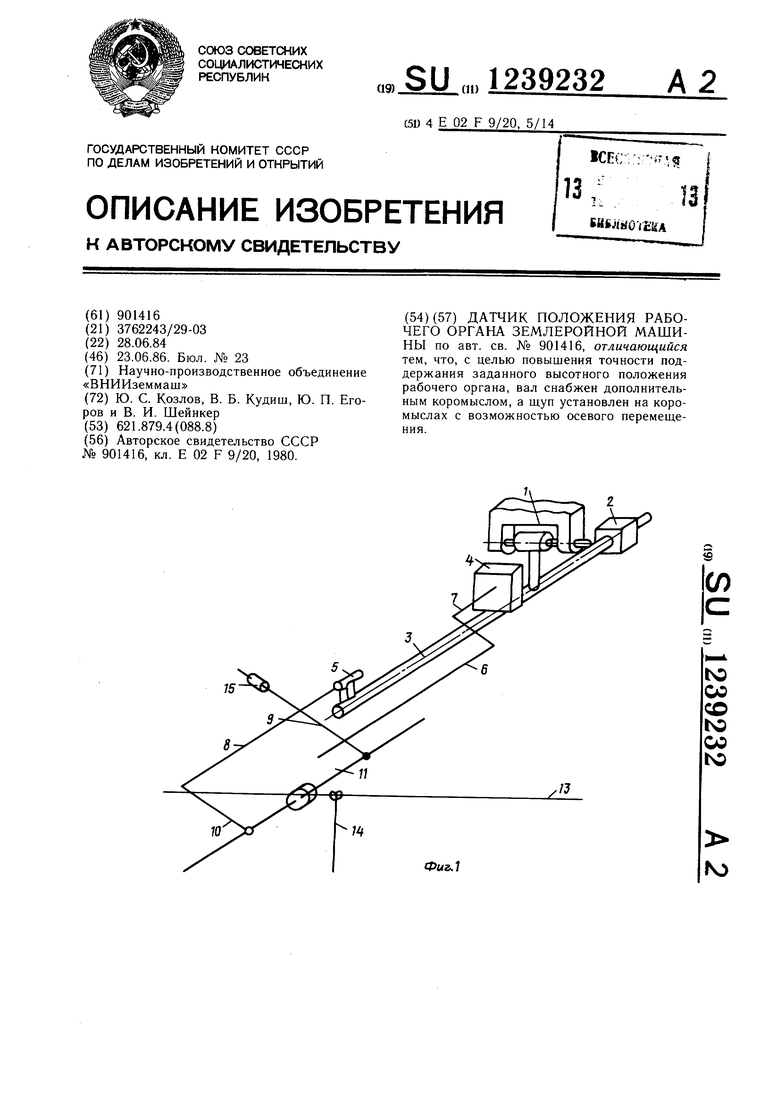
На фиг. 1 изображена кинематическая схема предлагаемого датчика; на фиг. 2 - схема прохождения роликом датчика опорного колышка.
Датчик положения рабочего органа землеройной машины подвешен на шарнире рабочего органа 1 машины и содержит контргруз 2, кронштейн 3 с установленным на нем чувствительным элементом 4 и дополнительной опорой 5.
Элемент 4 представляет собой сигнальное устройство и состоит из корпуса, закрепленного на кронштейне 3, и коленчатого рычага 6, установленного на валике 7 и способного поворачиваться относительно своей оси.
В дополнительной подшипниковой опоре 5 пропуш,ен вал 8 с закрепленными на нем двумя коромыслами 9 и 10, при этом на коромысло 9 опирается коленчатый рычаг 6 датчика. В направляющих коромысел 9 и 10 установлена контактная часть ш,упа 11, в средней части которой закреплена вилка 12, дно прорези которой опирается на копирный трос 13. Вилка 12 выполнена в виде ролика с канавкой клиновидного профиля, ширина которой в месте касания с копирным тросом больше ширины верхней части опорного колышка 14. Для уравновешивания коромысел 9 и 10 и коленчатого рычага 6, опирающегося на коромысло 9, служит груз 15.
Датчик работает следующим образом.
При подъеме или опускании рабочего органа 1 соответственно поднимается или опускается шарнир с закрепленным в нем
5
кронштейном 3 с установленными на нем элементом 4 и дополнительной опорой 5. Датчик уравновешен посредством контргруза 2 в положении, когда щуп лежит на неподвижном копирном тросе 13, а контактная часть щупа 11 установлена в любом положении относительно коромысла 9 и 10. При подъеме или опускании кронштейна 3 контактная часть щупа 11 с закрепленной на ней вилкой 12, оставаясь лежать на
неподвижном копирном тросе 13, поворачивает посредством коленчатого рычага 6 валик 7 датчика, в результате чего переключающее устройство элемента подает сигнал на включение исполнительного механизма. Действие исполнительного механизма приводит к вертикальному перемещению рабочего органа в направлении устранения возникающего отклонения щупа от заданного положения.
При смещении рабочего органа относиQ тельно копирного троса, т. е. при изменении расстояния между ними, контактная часть щупа 11 не изменяет своего положения относительно копирного троса, так как дно прорези вилки 12 опирается на копирный трос, что препятствует смещению вилки от5 носительно троса. При встрече с опорным колышком 14 (фиг. 2), на котором установлен копирный трос 13, верхняя часть опорного колышка проходит в канавке клиновидного профиля, что устраняет возможность ГЕОЛОМКИ щупа датчика.
0 В предлагаемом датчике контактная часть щупа 11 всегда уравновешена относительно копирного троса 13, так как прорезь вилки расположена в середине контактной части щупа.
В связи с этим при смещении машины
(рабочего органа) по курсу не возникают дополнительные усилия от щупа на кронштейн 3, что не изменяет углового положения его относительно рабочего органа и не ведет к возникновению ошибки в поддержании высотного положения рабочего органа.
IZ
Фиг.2
ВНИИПИ Заказ 3362/25Тираж 641 Подписное
Филиал ППП «Патент, г, Ужгород, ул. Проектная. 4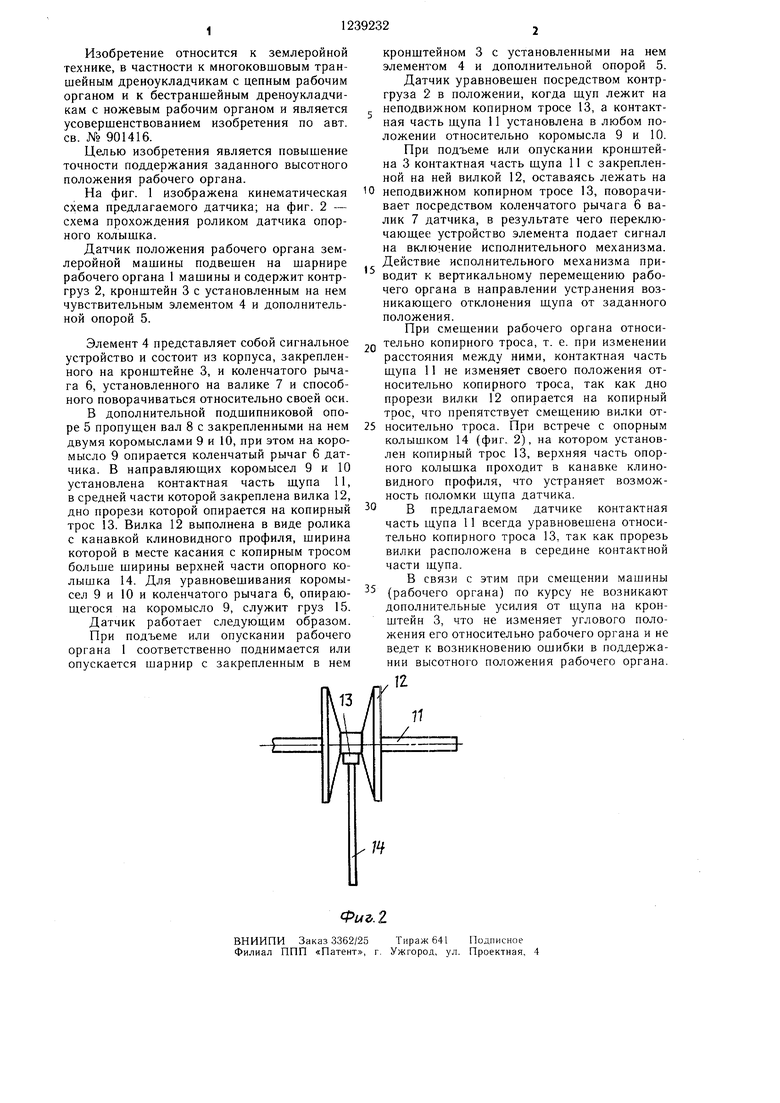
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| Устройство для слежения за высотным положением рабочего органа землеройной машины | 1984 |
|
SU1209782A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Датчик положения рабочего органа землеройной машины | 1985 |
|
SU1313976A1 |
| ДРЕНОУКЛАДЧИК | 1971 |
|
SU305243A1 |
| Устройство одновременного управления высотным и поперечно-угловым положениями рабочего органа землеройной машины | 1977 |
|
SU734353A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| ДАТЧИК ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА К ЗЕМЛЕРОЙНО- ТРАНСПОРТНОЙ МАШИНЕ ДРЕНОУКЛАДЧИКУ12 | 1971 |
|
SU306231A1 |
| Датчик вертикального положения рабочего органа землеройной машины | 1985 |
|
SU1625961A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
