Изобретение относится к области автоматического управления позиционными транспортными устройствами, например шахтными клетевыми подъемными установками, лифтами и т. п.
Известны устройства для программирования движения позиционных тра1Н|Спортных устройств с регулируемым приводом, содержащие соединенные между собой цифровой датчик перемещения, счетчик путевых имнульсов, комбинационный вычитатель, наборное коммутационное поле, переключатель пунктов следования, промежуточный и выходной цифро-аналоговые преобразователи, управляемые делители частоты, переключатель режимов, регистр разгона, усилитель и управляемые функциональные преобразователи.
Предложенное устройство отличается от известных тем, что в нем цифровой датчик соединен со входами управляемых делителей частоты и входом счетчика путевых импульсов, выход которого подключен ко входу комбинационного вычитателя, подключенного вторым входом через наборное коммутационное поле к переключателю пунктов следования. Выход комбинационного вычитателя через промежуточный цифро-аналоговый преобразователь и один из управляемых функциональных преобразователей, переключатель режимов и усилитель подключен ко входу литания выходного
цифро-аналогового преобразователя, основной вход которого через регистр разгона и переключатель режимов присоединен к выходу одного из уиравляемых делителей частоты.
Это позволяет увеличить функциональные возможности устройства.
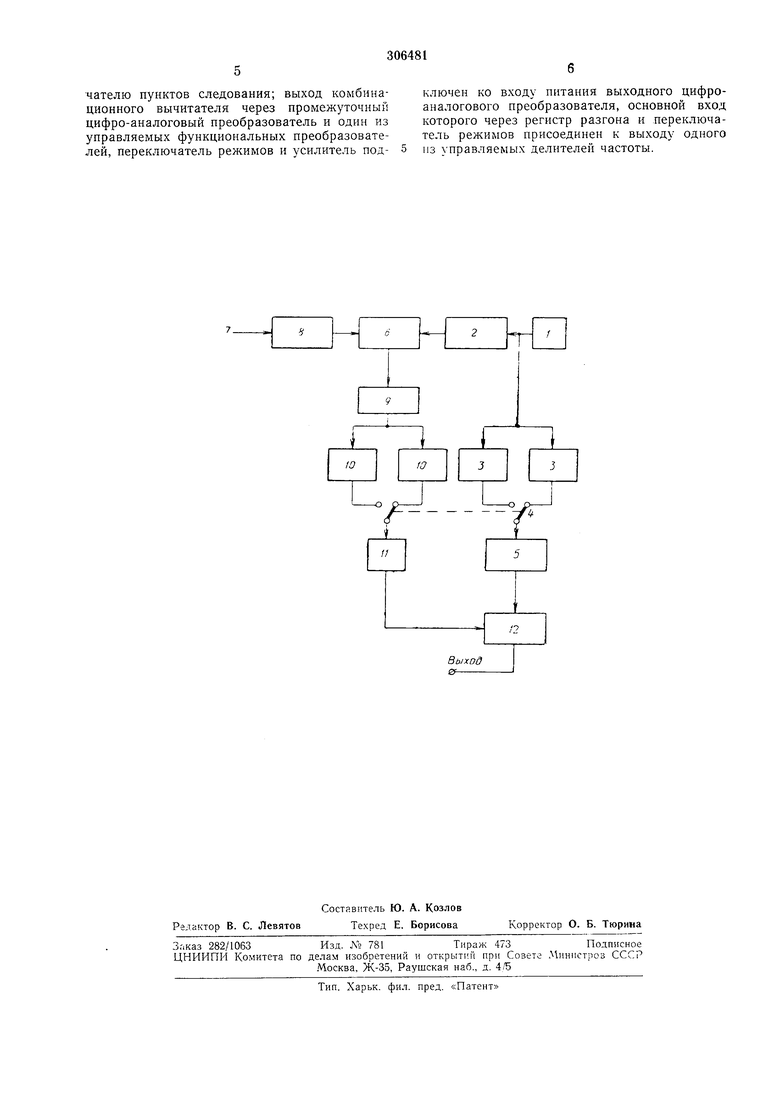
На чертеже приведена блок-схема устройства.
Цифровой датчик / неремещения подключен ко входу счетчика 2 путевых импульсов и через один из управляемых делителей 3 частоты в зависимости от положения переключателя 4 режимов к регистру 5 разгона. Один вход комбинационного вычитателя 6 соединен с переключателем 7 пунктов следования через наборное коммутационное поле 8, а другой - со счетчиком 2. Выход вычитателя 6 в зависимости от положения переключателя 4 соединен через промежуточный цифро-аналоговый преобразователь 9 с одним из управляемых функциональных преобразователей 10, в последний через усилитель // - со входом питания выходного цифро-аналогового преобразователя J2, основной вход которого соединен с регистром 5, а выход является выходом устройства.
Работает устройство следующим образом.
ройства относительно исходного пункта. Осуществляя индикацию состояния счетчика 2, можно осуществлять визуальный контроль за местоположением трансиортного устройства. На наборном коммутационном поле 8 иредварнтельно набираются коды пунктов следования относительно исходного пункта. Выбор одного из набранных кодов осуществляется переключателем 7. Комбинационный вычитатель 6 производит вычитание с учетом знака текущего кода местоположения транспортного устройства (поступающего со счетчика 2) из кода, включенного переключателем пунктов следования 7. Код результата вычитания представляет собой цифровой эквивалент текущего расстояния до пункта следования и используется для программирования замедления в функции оставшегося до лункта следования пути, а знак разности определяет направление движения. Линейный промежуточный цифро-аналоговый преобразователь 9 преобразует выходной код комбинационного вычитателя 6 в напряжение. Преобразователь 10 слулсит для функционального изменения напряжения (линейного в функции пути и параболического в функции времени), поступающего на его вход, и формирования участка замедления движения необходимой формы.
Если расстояние до точки следования больще пути замедления, выходной цифро-аналоговый преобразователь 12 запитывается постоянным напряжением. Прп достижении участка замедления вплоть до останова напряжение, питающее выходной цифро-аналоговый нреобразователь 12, меняется по закону замедлепия преобразователя 10. Делитель 3, коэффициент деления которого определяется состоянием регистра 5, изменяет частоту путевых импульсов таким образом, чтобы рост кода регистра 5 соответствовал участку разгона программы движения. Этот код поступает на основной вход преобразователя 12, вход питания которого подключен к усилителю 11.
Для программирования двинчения предварительно на наборном коммутационном поле 8 устанавливаются коды пунктов следования, задается форма кривой разгона для обоих на соответствующем делителе 3 и форма кривой замедления на преобразователе 10 каждого режима. Выбор программы осуществляется установкой переключателей 7 и 4. При пуске делитель 3 вызывает рост кода регистра 5 по заданной зависимости. Если при этом транспортирующее устройство далеко от пункта следования, то на выходе одного из преобразователей 10 имеется постоянное напря,ние, и на выходе устройства возникает папряжепие, изменяющееся по набранному закону разгона. При достижении максимальной скорости рост кода регистра 5 прекращается, и прекращается рост напряжения на выходе устройства. При подходе к точке замедления напряжение па выходе преобразователя 10 автоматически по заданной зависимости начнет уменьщаться. При этом несмотря на постоянство входного кода преобразователь 12 начнет уменьщать напряжение на выходе устройства в соответствии с уменьшением питающего его напряжения. Так реализуется участок замедления. При подходе в точку следования выход {ой код вычитателя 6 станет равным нулю, что вызовет останов транспортного устройства и сброс регистра 5, чем подготовляется следующий цикл работы. Устройство позволяет
0 осуществлять плавающую подвеску транспортирующего устройства без применения тормоза в точке останова. При отклонении положения устройства от установленной переключателем 7 точки следования на выходе вычитателя
5 6 (а следовательно, и на выходе устройства) возникает сигнал, амплитуда и знак которого будут соответствовать величине и направлению отклонения от точки следования. Этот сигнал можно использовать в регулируемом электроприводе для стабилизации положения транспортирующего устройства.
Для программного задания движения путевые команды «начало замедления и «стон автоматически формируются устройством.
В случае если в начале движения расстояние до установленной переключателем 7 точкн следования меньще пути замедления в установленном режиме, будет одновременно происходить рост кода регистра 5 и уменьщенне
напряжения, поданного па вход питания преобразователя 12. При этом автоматически сформируется неполная диаграмма скорости с уменьшенным значением максимальной скорости и изменением пути замедления.
Для измепения режима работы достаточно
переключить переключатель 4. При этом в работе участвуют другой делитель ,3 и другой преобразователь 10, формирующие новые кривые разгона и замедления в соответствии с их настройкой.
Делитель 3 и преобразователь 10 позволяют изменять заданную программу движения на любом желаемом участке тахограммы.
Предмет изобретепия
Устройство для программирования движения позиционных транспортных устройств с
регулируемым приводом, содержащее соединенные между собой цифровой датчик перемещения, счетчик путевых импульсов, комбинационный вычитатель, наборное коммутационное поле, переключатель пунктов следования,
нромежуточный и выходной цифро-аналоговые преобразователи, управляемые делители частоты, переключатель режимов, регистр разгона, усилитель и управляемые функциональные преобразователи, отличающееся, тем, что, с
целью увеличения функциональных возможностей, в нем цифровой датчик соединен со входами управляемых делителей частоты и входом счетчика путевых импульсов, выход которого подключен ко входу комбинационного
чателю пунктов следования; выход комбинационного вычитателя через промежуточный цифро-аналоговый преобразователь и один из управляемых функциональных преобразователей, переключатель режимов и усилитель подключен ко входу питания выходного цифроаналогового преобразователя, основной вход которого через регистр разгона и переключатель присоединен к выходу одного из управляемых делителей частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шахтной подъемной машиной | 1978 |
|
SU745845A1 |
| Система управления подъемником | 1977 |
|
SU622737A1 |
| СТЕНД ДЛЯ ИЗУЧЕНИЯ ГИБРИДНЫХ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2012 |
|
RU2493609C1 |
| Цифровой регулятор температуры | 1986 |
|
SU1352470A1 |
| Устройство для программного управления | 1981 |
|
SU976428A1 |
| Устройство аналого-цифрового преобразования | 1991 |
|
SU1807559A1 |
| СТЕНД ДЛЯ ИЗУЧЕНИЯ ЭЛЕКТРОННЫХ СРЕДСТВ АВТОМАТИЗАЦИИ | 2005 |
|
RU2279718C1 |
| Параллельно-последовательный аналого-цифровой преобразователь | 1985 |
|
SU1305851A1 |
| Шприц для наполнения колбасных оболочек фаршем | 1991 |
|
SU1837782A3 |
| Способ измерения мгновенных значений частоты электрического сигнала и устройство для его осуществления | 1987 |
|
SU1503022A1 |