Известна система нрограммного управления, например, координатно-Сверлильным станком, в котором позидионкровалие положения .изделия относительно инструмента осуществляется при июмощи фотоэлектрической головки, просвечивающей шаблон-программоноситель .и посылающий сигналы на фотоди-одную головку, соедиНенную с .исполнительными элемвнта-м.и. Однако .перемещение .координатного стола осуществляется построчло в режиме .поиска по шаблону, что приводит к малопроизводительному труду, так как расходуется много времени на холостой ход -координатного стола.
Целью изобретения является исключение постр-очното перемещения координатного стола в режиме поиска.
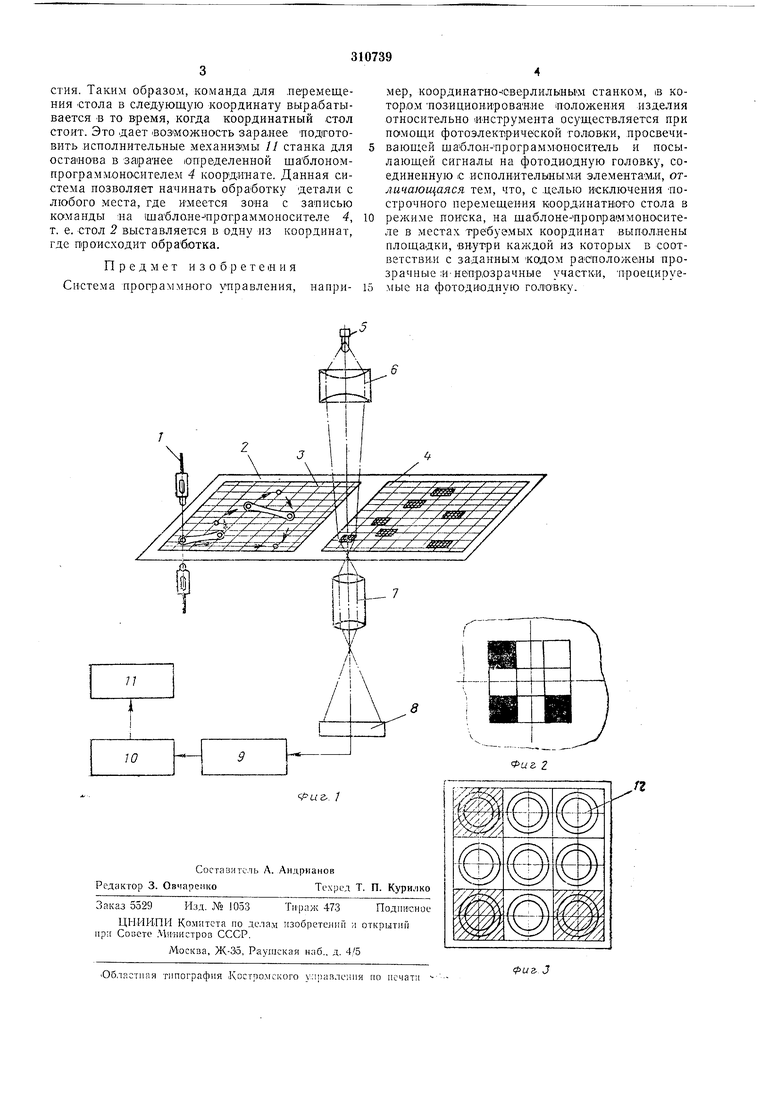
Это достигается тем, что на щаблоне-программоносителе в местах требуемых координат выполнены -площадки, в.нутри каждой из которых в соответствии с заданным кодом расположены прозрачные и непрозрачные участки, проецируемые на фотодиодную головку.
На фиг. 1 и-зображена блок-схема системы программного управления; -на фиг. 2 - зона шаблона-.п.рограммоносителя с записью команды; на фиг. 3 - фотодиодная головка, вид со сторо.ны щаблона-программоносителя.
Ко.ординат.но-сверлильный станок с системой управления состоит из шпинделей 1, в которых закрепляются .инструменты, для обработки отверстий, координатного стола 2, на который устана-вл.ивается обрабатываемая деталь 5 и с которым жестко свя.зан шаблонпрограм моноситель 4, проекционного уСтр.ойства, содержащего источн.ик 5 света, конденсатор 6 и объектив 7, фото.диодной головки 8, блока 9 усилителя, дешифратора 10 и исполнительных механизмов 11. В фотодиодной головке расположены фотодиоды J2,
Во время обработки детали в позиции юоординирования стола луч света от источника 5 через конденсатор 6 освещает зону записи команды на шаблоле-программоносителе4. Вся зона записи программы разбивается, в свою очередь, :На прозрачные и непрозрачные участки (см. фиг. 2). Каждому участку зоны на шаблоне-программо.носителе 4 соответствует свой фотодиод на фотодиодной голов-ке 8. Сочетанием затемненных :и прозрачных участков в зоне записывается необходимая команда на -перемещение стола 2 в любом направлении для обработки следующего отверстия. Луч света, пройдя через прозрачные участки зо.ны, попадает на соответствующий этому участку фотодиод. Сигналы с фотодиодной головки 8, -проходя через дешифратор 10, попадают на исполнительные механизмы //. После окончания сверления стол 2 с платой и щаблоном-программоносителем 4 перемещается в следующую координату для сверления очередного отвер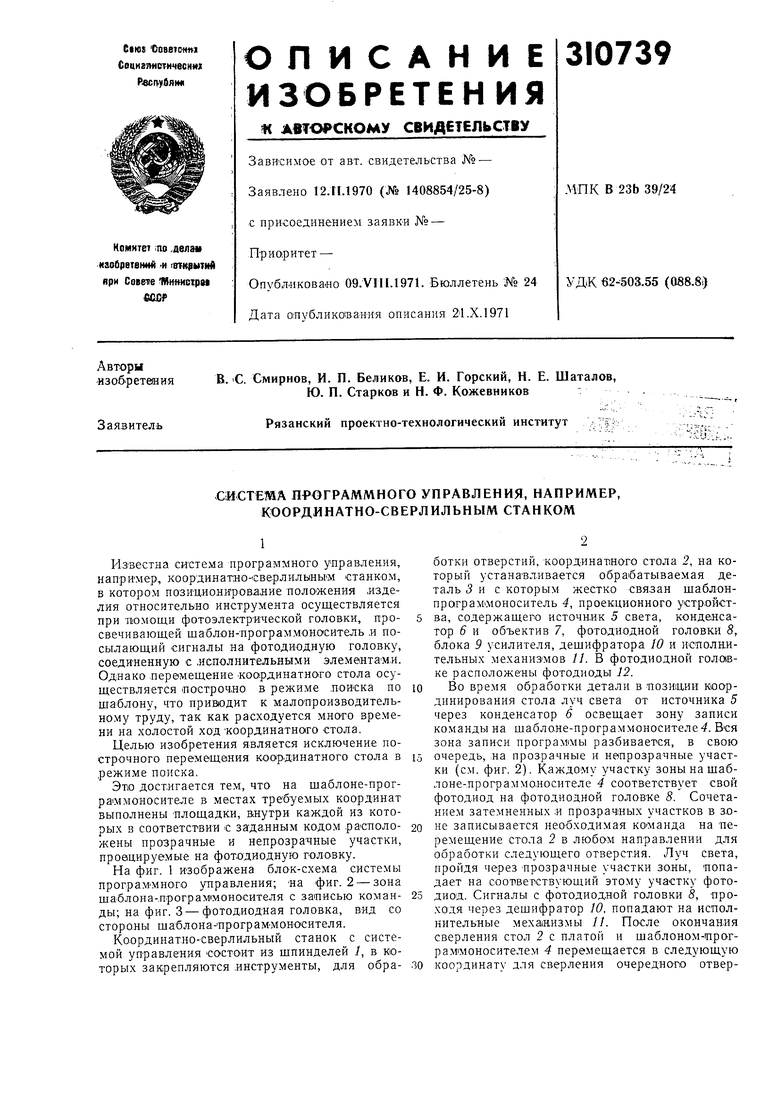
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления станком | 1978 |
|
SU867531A1 |
| КООРДИНАТНО-СВЕРЛИЛЬНЫЙ СТАНОК ДЛЯ СВЕРЛЕНИЯ | 1968 |
|
SU210614A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ЭЛЕКТРОИСКРОВОЙ УСТАНОВКОЙ | 1966 |
|
SU187502A1 |
| Устройство для двухкоординатного управления | 1974 |
|
SU467326A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО ПРОГРАММНОГОУПРАВЛЕНИЯ | 1968 |
|
SU221463A1 |
| УСТРОЙСТВО для ЗАПИСИ НА МАГНИТНУЮ ЛЕНТУ ПРОГРАММЫ УПРАВЛЕНИЯ СТАНКОМ | 1969 |
|
SU236859A1 |
| СПОСОБ УСТАНОВКИ РАБОЧЕГО ОРГАНА СТАНКА С КОНТУРНОЙ СИСТЕМОЙ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1973 |
|
SU393730A1 |
| Устройство для изгтовления групповых шаблонов | 1975 |
|
SU666668A1 |
| СИСТЕМА ЧИСЛОВОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУШИМИ СТАНКАМИ | 1972 |
|
SU344933A1 |
| Сверлильно-клепальный автомат | 1975 |
|
SU603479A1 |
