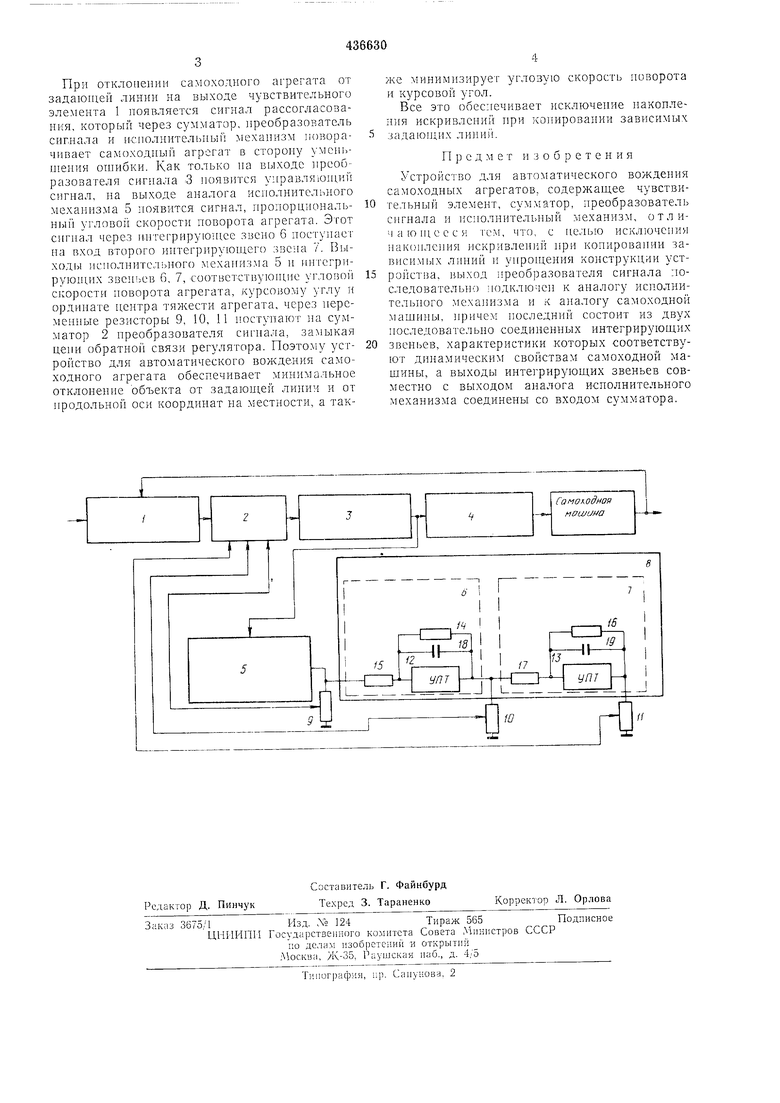
При отклонении самоходного aiperara от задаюи1ей линии на выходе чувствительного эле.ента 1 появляется сигнал рассогласования, который через сумматор, преобразователь сигнала и исполнительный механизм поворачивает самоходный агрегат в сторону умеп.шения ошибки. Как только на выходе преобразователя сигнала 3 появится унравляюн пй сигнал, па выходе аналога исполнительного механизма 5 появится сигнал, пролорцнональHbiii углово скорости поворота агрегата. Этот сигнал через и.итегриру10Н1ее 6 ностунаст на вход второго интегрпруюндего звена 7. Выходы исполпнтельпого мехапизма 5 н интегрируюищх звеньев 6, 7, соответствуюниш угловой скорости поворота агрегата, курсовому углу и ордииате центра тяжести агрегата, через переменные резисторы 9, 10, 11 поступают па сумматор 2 преобразователя сигиа; а, замыкая цеии обратно связи регулятора. Поэтому устройство для автоматического вожде-ния самоходного агрегата обеспечивает минимальное отклонение объекта от ,ей линии и от продольной оси координат на местности, а также минимизирует угловл-чо скорость поворота и курсовой угол.
Все это обеспечивает искл Очение 1аконления искривлени при ко ировании зависимых задаюплих ли)И1г
П р е д м е г п з о б р е т е н и я
Устройство для автоматического вождения самоходн ьх агрегатов, содержагцее чувствительный элемент, сумматор, преобразователь сигнала п исполнительный механизм, отличаюи1еес тем, что, с пелыо исключения пакоилепия пскривлени1{ ipn копировапии заВИСИМ1ЛХ лииий и у 1ро цения конструкции устройства, выход преобразователя сигнала последовательно подкл оче 1 к аналогу исполнительного мехапизма и к аналогу самоходной машины, причем юследний состоит из двух последовательно соединенных интегриру ощих звеньев, хара стеристики которых соответствуют динамическим свойствам самоходной , а выходы интегрируюндих звеньев совместно с выходом аналога исполнительного механизма соединены со входом сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения самоходного агрегата | 1988 |
|
SU1605953A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО НАПРАВЛЕНИЯ | 1971 |
|
SU320253A1 |
| Устройство автоматического вождения самоходных агрегатов | 1986 |
|
SU1367883A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1981 |
|
SU1001879A1 |
| Устройство для автоматического вождения мобильных агрегатов | 1984 |
|
SU1166690A1 |
| Устройство для автоматического вождения самоходных агрегатов | 1985 |
|
SU1336964A1 |
| Устройство для управления движением самоходных агрегатов | 1980 |
|
SU941943A1 |
| ОРОСИТЕЛЬНЫЙ ТРУБОПРОВОД СИСТЕМЫ КАПЕЛЬНОГО ОРОШЕНИЯ, СПОСОБ ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА НА ПОСАДКАХ ПРИ КАПЕЛЬНОМ ОРОШЕНИИ И СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА | 2004 |
|
RU2275016C1 |
| ГИРОКОМПАСНАЯ СИСТЕМА ОРИЕНТАЦИИ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2014 |
|
RU2579384C1 |
| Устройство для автоматического направления движения самоходных агрегатов | 1977 |
|
SU648156A1 |
