1
Изобретение относится к области автоматики и может найти широкое применение в систе.мах автоматического управления.
Известны способы, при которых начальные условия для построения быстродействующих процессов учитывают путем измерения скорости и ускорения выходной координаты. 1J Однако такое формирование корректирующего сигнала с целью уменьшения колебательных процессов в нелинейной системе не целесообразно, так как измерение скорости в системах с выходной величиной в виде вала осуществляется с помощью тахогенераторов и эти измерения существенно искажаются наличием нелинейных характеристик самих измерителей (тахогенератор, редуктор, соединяюпшй тахогенератор с объектом и т. д.).
Поэтому наиболее эффективно с целью уменьшения колебательности в нелинейных системах учитывать начальные условия по сигналу ощибки системы.
Известен способ коррекции нелинейной системы автоматического управления (САУ), основанный на выделении сигнала разности между сигналом ошибки системы и сглаженным сигналом этой ошибки с последующим формированием коррерстирующего импульса в момент возникновения сигнала разности ц суммированием корректирующего импульса с сигналом ошибки до момента равенства сигнала, пропорционального скорости из.менення сигнала разности, и опорного напряжения. 2 Однако такой способ формирования корректирующего сигнала недостаточно эффективен в системах высокого порядка (3-го и выше). Это объясняется тем, что процессы,- вызванные корректирующим сигналом в этих системах, имеют более сложный характер, чем в системах ниже третьего порядка, поэтому корректирующий сигнал, сформированный путем сравнения скорости изменения сиг){ала разности с опорным сигналом, недостаточно эффективно устраняет нежелательные колебательные процессы.
Целью предлагаемого изобретения является устранение указанного недостатка, в результате чего эффективно повышается точность нелинейных САУ и расширяется область их применен1 Я.
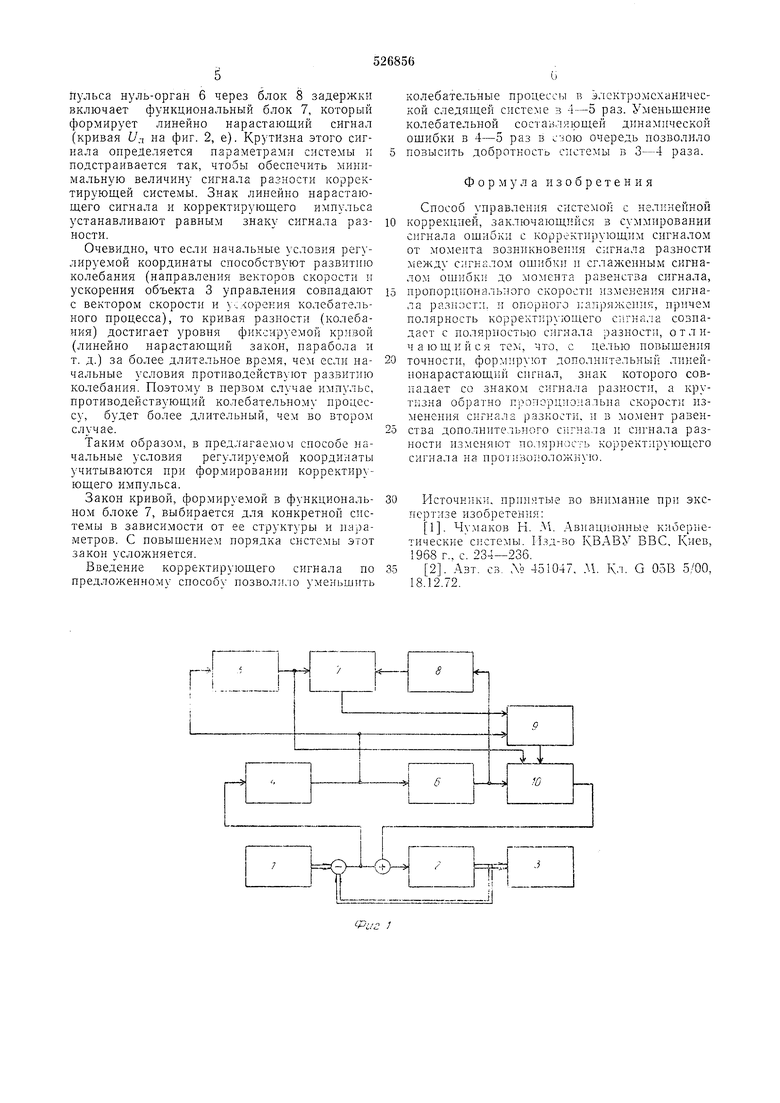
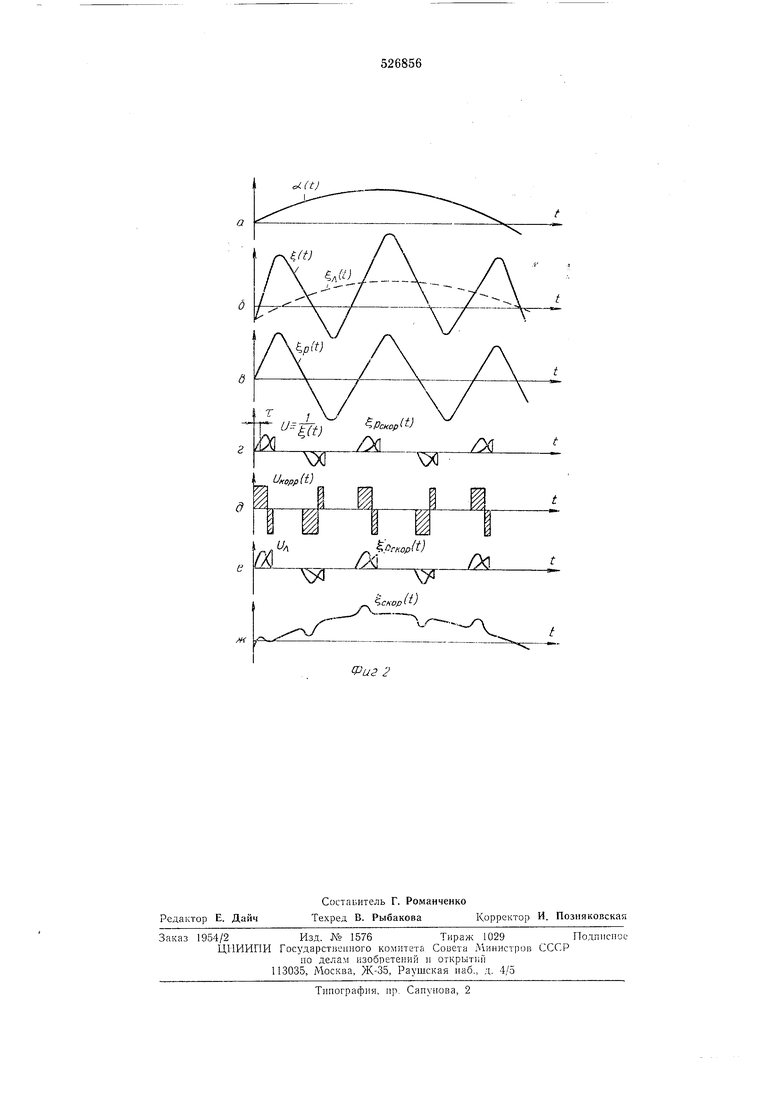
Поставленная цель достигается за счет того, что длительность первой части корректирующего импульса определяют временем изменения сигнала разности до величины сигнала, который с задержкой, определяемой параметрами системы, формируется по закону, обеспечивающему максимальное быстродействие уменьшения сигнала разности, крутизна этого закона обратно пропорциональна скорости изменения сигнала разности и знак соответствует знаку сигнала разности, а момент выключения другой части корректирующего сигнала, противоположной по знаку первой, определяют временем изменения скорости сигнала разности до заданного значения, причем знак первой части корректирующего импульса совпадает со знаком сигнала разности. На фиг. 1 представлена блок-схема устройства, реализующего предложенный способ; на фиг. 2 приведены временные диаграммы работы системы, где: а - диаграмма кривой задающего воздействия, a(t); б - диаграммы кривой динамической ошибки е(0 нелинейной системы и линейной системы сглаженная ошибка нелинейной системы Ел (01; в - диаграмма кривой сигнала разности между сигналом ошибки системы и сглажо} ным сигналом этой ошибки Ер(/); г - диаграмма кривой сигнала разности ер.скор (О скорректированной системы, где и - сигнал, сформированный по закону, обеспечивающему максимальное быстродействие уменьшения сигнала разности с крутизной, обратно пропоциональной скорости изменения сигнала разности е(0; т - задержка, определяемая параметрами системы; д - корректирующие знакопереключающие импульсы, е - диаграмма кривой сигнала разности sp.cKop(0 скорректированной системы, где f/л - сигнал, сформированный по линейно нарастающему закону (упрощенному закону); ж - диаграмма кривой динамической ошибки скор-(0 нелинейной системы, скорректированной предложенным способом. Система содержит задающий блок 1, корректирующую систему 2, объект 3 унравЛЗния, блок 4 формирования сигнала разности, дифференцирующее звено 5, нуль-орган 6, функциональный блок 7, блок 8 задержки, блок 9 сравнения, формирователь 10 корректирующих имнульсов. Система работает следующим образом. Пусть, например, объект 3 управления должен с высокой точностью отслеживать движение задающего блока 1 по закону а() (фиг. 2, а). Система замкнута по углу и нри слежении имеет динамическую ошибку E(t) (фиг. 2, б). Величина и форма динамической ошибки зависят от вида управляющего воздействия и параметров системы. Если система линейная, т. е. отсутствуют люфт, зона нечувствительности и др., то динамическая ошибка имеет гладкий характер ЕЛ (О (фиг. 2, б) нри гладком управляющем воздействии. Однако электромеханических линейных систем нрактически не существует, поэтому в нелинейных системах на динамическую ошибку накладываются автоколебания, вызванные нелинейностями системы. Для компенсации автоколебаний в нелинейной системе автоматического управления сигнал разности ер() (фиг. 2, в) между сигчалом ошибки системы и сглаженным сигнп510 15 20 25 30 35 40 45 50 55 60 65 лом этой ошибки выделяют блоком 4 фор.мирования сигнала разности и в момент возникновения сигнала разности, который фиксируется нуль-органом, формирователь 10 корректирующих импульсов подает на вход корректирующей системы 2 знакопереключающий импульс Укорр.(0 (фиг. 2, д), который преиятствует отклонению объекта управления 3, вызванному колебательным процессом. Для определения длительности первой части корректирующего импульса с помощью дифференцирующего звена 5 измеряют скорость изменения сигнала разности, а в блоке 9 сравнения сравниваются сигнал разности Kp(t} и сигнал с выхода функционального бло7 и Т(0 (фиг. 2, г). Фукциональный блок 7 включают нуль-органом 6 через блок 8 задержки при изменении знака сигнала разности. Блок 8 задержки необходим для того, чтобы предотвратить отрицательное действие корректирующего импульса: перерегулирование в том случае, когда крутизна сигнала с выхода функционального блока 7 больще крутизны сигнала разности в момент его возникновения, т. е. команда на переключение (или в упрошенном варианте отключение) корректирующего импульса не будет подана блоком 9 сравнения в формирователь 10 корректирующих имнульсов. Величина задержки т выбирается минимально допустимой для каждой системы и зависит от частотной характеристики системы автоматического управления (импульс, но длительности равный величине задержки т, не должен проходить на выход системы автоматического управления). В момент, когда сигнал с выхода функционального блока 7 становится равным сигналу разности, формирователь 10 корректирующих импульсов изменяет знак корректируюнгего импульса на противоположный (в ynponieiiном варианте отключает) и отключает корректирующий импульс, когда сигнал скорости изменения сигнала разности с выхода дифференцирующего звена 5 становится равным заданному значению. Функциональный блок 7 формирует сигнал 1 LES по закону, обеспечивающему максималыше быстродействие у.меньшения сигнала разности, и крутизна этого закона обратно пропорциональна скорости изменения сигнала ра.зности. Знак сигнала с выхода функционального блока 7 и первой части корректирующего импульса соответствует знаку сигнала разности. В упрощенной схе.ме стройства отсутствуют дифференцируюн ее звено 5 и связи от дифференцирующего звена. Корректирующий импульс в упрощенной схе.ме формируется в : 1омент возникновения сигнала разности, который фиксируется нуль-органом 6. Для определения длительности корректируюп1;егп имПульса нуль-орган 6 через блок 8 задержки включает функциональный блок 7, который формирует линейно нарастающий сигнал (кривая и,1 на фиг. 2, е). Крутизна этого сигнала онределяется параметрами системы и подстраивается так, чтобы обеспечить минимальную величину сигнала разности корректирующей системы. Знак линейно нарастающего сигнала и корректирующего импульса устанавливают равным знаку сигнала разности.
Очевидно, что если начальные условия регулируемой координаты способствуют развитию колебания (направления векторов скорости и ускорения объекта 3 управления совпадают с вектором скорости и у ,хорения колебательного процесса), то кривая разности (колебания) достигает уровня фиксируемой кривой (линейно нарастающий закон, парабола и т. д.) за более длительное время, чем если начальные усьтовия противодействуют развитию колебания. Поэтому в первом случае импульс, противодействующий колебательному процессу, будет более длительный, чем во втором случае.
Таким образом, в предлагаемом способе начальные условия регулируемой координаты учитываются при формировании корректирующего импульса.
Закон кривой, формируемой в функциональном блоке 7, выбирается для конкретной системы в зависимости от ее структуры и параметров. С повышением порядка системы этот закон усложняется.
Введение корректирующего сигнала по предложенному способу позволило уменьшить
колебательные процессы в электромеханической следящей системе з 4-5 раз. Уменьщение колебательной составляющей динамической ощибки в 4-5 раз в ичою очередь позволило повысить добротность системы в 3-4 раза.
Формула изобретения
Способ управления системой с нелинейной
коррекцией, заключающийся в суммировании сигнала ошибки с корректирующим сигналом от момента возникновения сигнала разности между сигналом ошибки и сглаженны.м сигналом ошибки до момента равенства сигнала,
пропорционального скорости изменения сигнала разн;)сти. и опорного ;апряжения, причем полярность корректирующего сигнала совпадает с полярностью сигнала разности, отличаю щ и и с я тем, что, с целью новыщения
точности, формируют дополнительный линейнонарастающий сигнал, знак которого совпадает со знаком с; гнала разности, а крутизна обратно пропорциолальна скорости изменения сигнала разности, и в мо.мент равенства дополнительного сигна.та и сигнала разности изменяют полярность корректирующего сигнала на ПРОТИВОПОЛОЖНУЮ.
Источники, принятые во внимание при экспертизе изобретения:
1. Чумаков Н. М. Авиационные кибернетические системы. Изд-во КВАВУ ВВС, Киев, 1968 г.. с. 234--236.
2. Авт. св. До 451047, Л1. Кл. G ОоВ 5/00, 18.12.72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции нелинейной системы автоматического регулирования | 1972 |
|
SU451047A1 |
| Система автоматического управления | 1972 |
|
SU446031A1 |
| Система автоматического управления | 1974 |
|
SU571793A1 |
| Система автоматического управления | 1975 |
|
SU525920A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| Электропривод постоянного тока | 1983 |
|
SU1185517A2 |
| Устройство для автоматического управления | 1975 |
|
SU589588A1 |
| Следящая система | 1979 |
|
SU840798A1 |
| Следящая система | 1975 |
|
SU550617A1 |
Г
pcKop ij
/0(1
(f
PA r Pr.oplt)
(, Ai
скор()
